The photograph of the lumped sugar/erythritol porous template is shown in Figure 3A. Figure 3B shows the flexible electrode layer with a scrape-coated ECPCs pattern. Figure 3C shows the soft capacitive pressure sensor with a porous dielectric layer fabricated with the proposed method. Four porous PDMS dielectric layers were fabricated based on PDMS/toluene solutions with different mass ratios of 1:1, 3:1, 5:1, and 8:1, respectively. Optical microscope images showing the pore morphologies of the different structures are presented in Figure 3D. It was found that the pore wall thickness increased with an increasing mass ratio of the PDMS/toluene solution.
To verify the dependence of the mechanical properties on the porosity, a finite element analysis (FEA) was carried out to simulate the pressure developed in the porous PDMS dielectric layer as a function of the compressive strain using advanced numerical modeling software (see Table of Materials). A 3D model of the porous PDMS with open pores was created, with a length of 2 mm on the z-axis. The location of the pores was fixed, while the diameters were changed to obtain different porosities. An increasing pressure was applied in the z-axis, while periodic and symmetric boundary conditions were applied in the x-axis and y-axis. The simulation result in Figure 4A shows that a higher porosity contributed to a larger compressive strain with improved linearity under the same applied compression pressure. Figure 4B,C shows the capacitance-pressure response curve of the sensors with porous PDMS dielectric layers with different PDMS/toluene mass ratios. In the pressure loading range of 0-10 kPa, the sensor with a 1:1 PDMS/toluene mass ratio exhibited the highest sensitivity of 3.47% kPa−1, which was more than two-fold higher than that of the sensor with the 8:1 PDMS/toluene mass ratio (1.48% kPa−1). As the pressure increased, the pores in the dielectric layer gradually reduced in size, leading to a decrease in the sensitivity until it reached the same level of 0.66%-0.89% kPa−1 for all porosities, as shown in Figure 4C. Figure 4D shows the capacitive response to five consecutive loading-unloading tests under the same loading pressure of approximately 10 kPa. The response time of loading (i.e., the time required for the sensor capacitance to reach 90% of its steady-state value) was determined to be about 0.2 s, as shown in Figure 4E. In addition, as shown in Figure 4F, the cyclic tests also revealed that the as-fabricated soft capacitive sensor had excellent repeatability after 2,500 cycles.
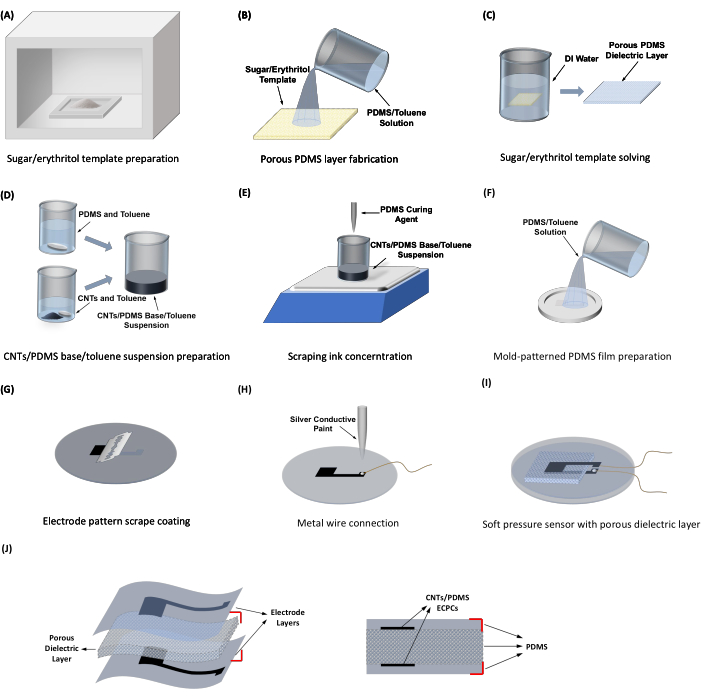
Figure 1: Schematic of the fabrication process. (A–C) The fabrication flow of the porous PDMS dielectric layer. (D,E) The preparation of the ECPCs ink. (F,G) The scrape-coating process of the electrode layer. (H,I) The wire connection and bonding process of the soft capacitive pressure sensor with the electrode-porous dielectric layer-electrode sandwich structure. (J) Illustrations of the structure and materials of the sensor. Please click here to view a larger version of this figure.
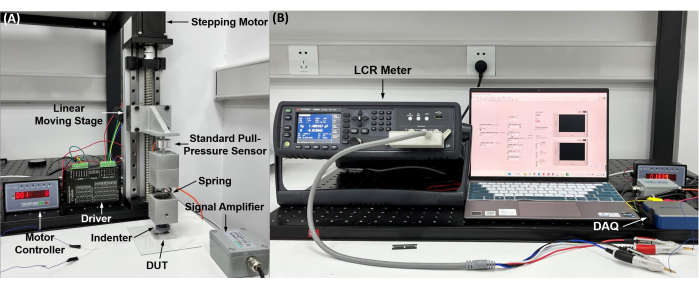
Figure 2: Experimental setup. (A) Stepping pressure loading setup. (B) Data acquisition system. Please click here to view a larger version of this figure.
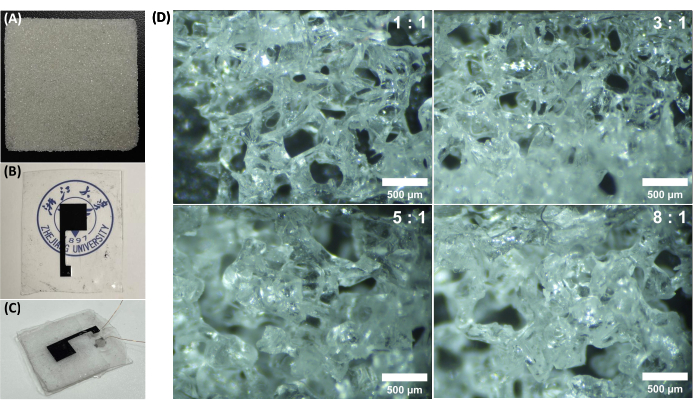
Figure 3: Sensor structures. (A) Photograph of the sugar/erythritol template. (B) The flexible electrode layer with the scrape-coated ECPCs pattern. (C) Photograph of the soft capacitive pressure sensor with the porous dielectric layer. (D) Optical microscope images of the porous PDMS dielectric layers fabricated with different PDMS/toluene mass ratios (PDMS base:toluene = 1:1, 3:1, 5:1, and 8:1). Please click here to view a larger version of this figure.
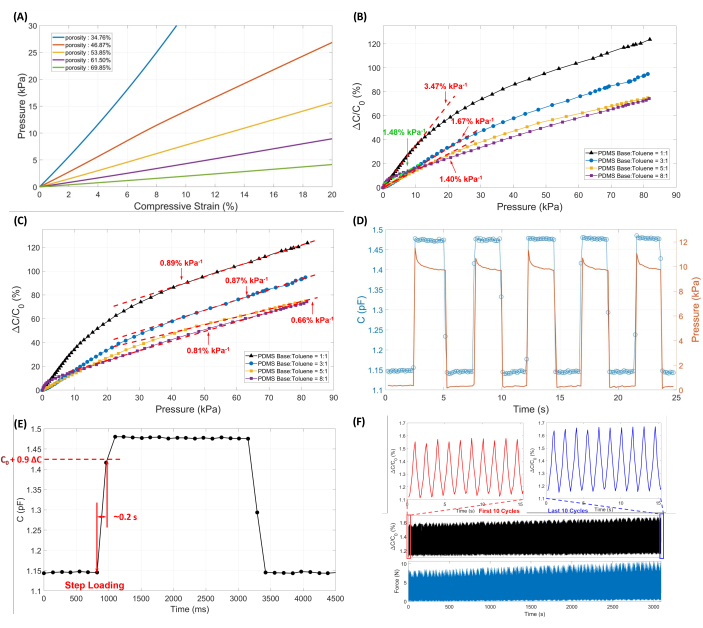
Figure 4: Simulation and characterization result. (A) Simulated stress-strain curve of the porous PDMS layers with different porosities under low-pressure loadings. (B,C) Pressure-response curve of the capacitive pressure sensors fabricated with PDMS/toluene solutions with different mass ratios (PDMS base:toluene = 1:1, 3:1, 5:1, and 8:1). (D,E) Dynamic response of the sensor (PDMS base:toluene = 1:1). (F) The stability test result of the porous capacitive pressure sensor (2,500 cycles of loading). Please click here to view a larger version of this figure.
