NOTE: Screenshots of software steps are included as Supplementary Files. Please note that the software steps described below are specific to the chosen software (see the Table of Materials). The overall approach can be extended to any stereo software platform.
1. Prepare Stereo-camera Footage for Analysis
NOTE: Calibration using a calibration cube is recommended. A calibration cube is a three-dimensional aluminum-frame with precisely positioned reflective dots on the surface. When used in conjunction with calibration software, a calibration cube leads to greater precision and accuracy than checkerboard approaches9.
- Calibrate the Lander cameras with stereo-calibration software (Figure 1 and Figure 2; see Table of Materials for a software recommendation).
NOTE: Calibration can be verified before use in the field by measuring targets of known sizes at varying distances (see Supplementary Video 1). Average measurement error for a 50-cm target at distances of 3 m (or less) should be within 2% of the known target length. Also note that a given calibration will only be valid if camera positions do not change relative to one another. It is critical to take care and avoid unintended jostling of the cameras until all sampling has been performed. - Collect field data using the calibrated Lander (Figure 1, Supplementary Video 2).
- After field study is complete, create a new project folder containing both video and calibration files.
NOTE: In each project folder there needs to minimum of five files: the left and right ".Cam" calibration files, the left and right video files (.MP4 or.AVI format only), and the species list (.txt format). - In the stereo measurement software, start a new measurement project, and load appropriate video and calibration files.
NOTE: Screenshots of all software steps are available among the Supplementary Files.- Navigate to 'Measurement' > 'New measurement file'.
- Set the picture directory by navigating to 'Picture' > 'Set picture directory', and choose the folder containing all project files.
- Load the left camera ".Cam" file by navigating to 'Stereo' > 'Cameras' > 'Left' > 'Load camera file' and selecting the appropriate file.
- Repeat step 1.4.3 to load the right camera ".Cam" file
NOTE: These files contain calibration measurements for each camera (e.g., pixel size, aspect ratio, radial distortion, decentring distortion, etc.) and will be used to measure fish and calculate distance-from-camera (i.e., Z distance). - Define the movie sequence for the left video file by navigating to 'Picture' > 'define movie sequence' and selecting the left camera video file.
- Load the left video file into measurement software by selecting 'Picture' > 'load picture'.
NOTE: Be sure that the 'Lock' box is unchecked before loading video files. This allows both videos to be loaded simultaneously. - Define movie sequence and load video file for the right video using the menus 'Stereo' > 'picture' > 'define movie sequence' and 'Stereo' > 'picture' > 'load picture'.
- Load the species list by navigating to 'Measurement' > 'Attributes' > 'Edit/load species file'.
- Enter survey ID information under 'Information Fields' > 'Edit field value' and save file to create an.EMObs project.
- Sync the videos using light flash, handclap, Coordinated Universal Time (UTC) stamp, or any time specific event that occurs in both videos.
- If using UTC time stamp, frame-step forward in the left video until the time stamp starts a new second. Else frame forward until light flash or handclap occurs.
- Frame-step the right video forward until the time stamp matches the left video exactly. Else frame step forward until the exact moment the light flash or handclap matches the left video.
NOTE: It is important that videos be synchronized to the same frame. Video synchronization should be checked periodically using the video time stamp to avoid camera frame drift during analysis. A filmed hand clap could also be used at the beginning and end of the video to test that right and left videos were synced to the same frame.
- Click the "Lock" button to ensure videos play together and maintain synchronization.
2. Generate Point Counts and Calculate MaxN
NOTE: Each fish is initially marked with a 2D point to the lowest possible taxonomic resolution. Fish with uncertain ID should be marked for later review.
- Wait to begin counting fish until the end of a complete camera rotation to ensure that a full 360 degrees is used. Also wait until sediment has cleared (generally <1 – 2 min after contact with bottom).
- As soon as the Lander starts its first rotation, right click to define a new sample period: 'Period definitions' > 'Add new start period'. Enter first period name as "01" and click "OK".
- As the Lander rotates, begin marking each fish that comes into frame with a 2D point using the left camera only.
- To add a 2D point, right click, select 'Add point', and choose the correct species name. Label to the lowest possible taxonomic level, selecting 'spp.' for unknown species and click "OK".
- Continue to mark each new fish according to step 2.2.1 until the conclusion of the rotation.
- Repeat protocol procedures 2.1 – 2.2 for each additional Lander rotation – ensuring that a new period is defined at the start of each camera rotation.
NOTE: Species accumulation curves were used to determine that eight rotations were, on average, sufficient to characterize fish abundance in the present study. Researchers should consider conducting preliminary tests with additional camera rotations, over longer soak times, to characterize the optimum number of camera rotations within a particular ecosystem. - Calculate species-specific counts of individuals observed per camera rotation.
- After all rotations have been enumerated, export 2D points by navigating to 'Measurement' > 'Measurement summaries' > 'Point measurements' and save 2D points as a.txt file.
- Open the saved 2D.txt point file as a spreadsheet and create a PivotTable of species vs. rotation number to summarize counts (Table 1) by navigating to 'Insert' > 'PivotTable'. Select "Genus and Species" for 'Row Label', and "Period" for 'Column Label'.
- Choose the MaxN for each species by selecting the camera rotation that has the greatest number of individuals of that species (Table 1).
- For fishes identified only to genus, select a genus-level MaxN based on the rotation that had the greatest number of individuals identified to species in that particular genus.
NOTE: This step helps to avoid double-counting individual fish that were only identifiable to higher taxonomic groups (e.g., only to genus or family). For example, in Table 1, 'rotation 1' contained 10 unidentified Sebastes spp. and 33 members of the genus Sebastes identified to species, whereas 'rotation 3' contained only two unidentified Sebastes spp. and 43 members of the genus Sebastes identified to species. Therefore 'rotation 3' would be used for MaxN count of unknown Sebastes spp. In this way, the conservative assumption is made that 8 of the unidentified Sebastes spp. in 'rotation 1' were identified in 'rotation 8'. - If multiple rotations have the same MaxN count for a given species, choose the first rotation with MaxN for 3D point measurements.
- For each species, take 3D measurements of fish in the rotation that MaxN occurred.
- Use the saved 2D points collected in steps 2.1 – 2.3 to navigate to the exact same fish for 3D measurement.
- Zoom in at least 4X to better identify the tip of the fish snout and edges of caudal fins (Figure 3).
NOTE: It may be necessary to frame step forward or backward to find the best orientation of the fish for a 3D measurement. The 'best' orientation is one where both the snout and edges of the caudal fins are visible in both cameras. - Manually click on the tip of the snout, then the edge of the tail in the left camera, then repeat the selection in the same order in the right video.
- Select correct species identification from dropdown menus as was done in 2.2.1.
- If a 3D length measurement is not possible, for instance if the head and tail of the fish are not visible in both cameras, then mark a 3D point instead by left clicking the same position of the fish in both the left and right videos. Fill out the information fields as before and leave the comment "Exclude from length measurement".
NOTE: MaxN may occur on different rotations of the cameras for different species; however, for any given species, measurements should occur in one rotation only (Table 1).
- After completing 3D measurements for all fishes, export data as.txt file for further analysis.
- Navigate to 'Measurement' > 'Measurement summaries' > '3D Point and length measurements', and save.txt file to export.
3. 95% Z distance procedure for species-specific survey areas
NOTE: The 95% Z distance is an estimate of the average distance a species could reliably be identified in a given study while excluding cases of exceptional conditions of water clarity or lighting. This calculation takes into account the average oceanographic conditions for a given study and will need to be re-calculated for each new study.
- Use simple bootstrapping to determine if the sample size is great enough to characterize the distance of reliable detection for each species.
- For each sample size class (e.g., sample size bins of 5 fish), take 1,000 random draws of the selected sample size with replacement from the sample population and calculate the mean 95% quantile of distances of these 1,000 draws, and plot the resulting asymptotic curve. See supplied code in Supplemental Files 1 & 2.
- Verify that adequate samples were obtained by comparing the actual sample size with the 95% Z distance asymptote with increasing sample size.
- Calculate the 95% Z distance value as the 95% quantile of distance-from-camera measured for a species across all surveys.
- Calculate the effective area surveyed for each species using the 95% Z value.
NOTE: In the case of a rotating Lander, the 95% Z value represents the outer radius of a surveyed swath, with the inner radius determined by the physical setup of the tool and how close to the base the cameras are able to observe. As the Lander rotates, a 'donut' shaped survey area is formed (Figure 4).- Calculate area surveyed as:

NOTE:For example, a relatively large species like Yelloweye Rockfish (Sebastes ruberrimus) had a 95% Z distance of 3.3 m and an effective survey area of 30.9 m2 per Lander deployment: 34.3 m2 (outer circle) – 3.4 m2 (inner circle) = 30.9 m2 (total survey area).
- Calculate area surveyed as:
- Using the calculated area surveyed (step 3.3.1), convert individual species counts (MaxN) into density estimates for each visual survey using the equation:

NOTE: A similar procedure could be used to calculate a volumetric density rather than an areal density; however, that process is not described here.
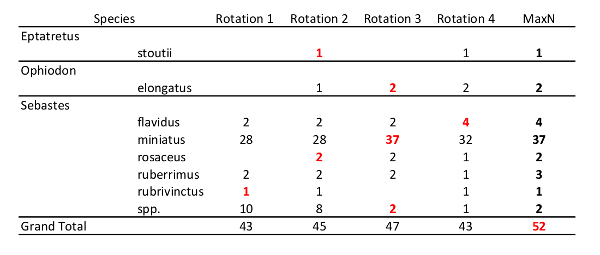
Table 1: Example MaxN summary table. The selection of MaxN for each species is demonstrated with red and bold text. Note that a conservative MaxN for unidentified Sebastes spp. was determined by the rotation with the most Sebastes identified to species (rotation 3). Also, while this study used eight camera rotations, only four rotations are displayed in Table 1 for simplicity. The process for selecting MaxN is identical regardless of the number of rotations.
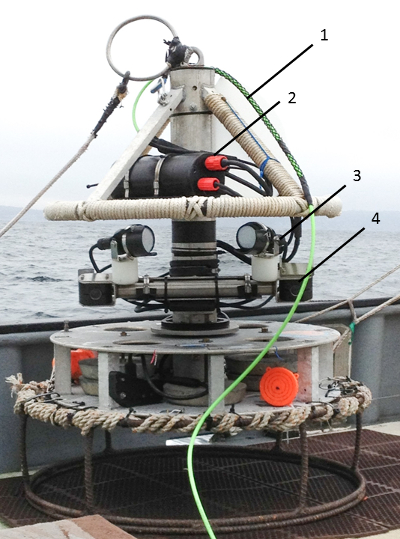
Figure 1: Stereo video Lander. Key hardware is numbered (1) 300 m umbilical, (2) two digital video recorders (DVR) with removable 32GB storage cards inside waterproof bottle, (3) two LED lights outputting 3,000 lumens at a color temperature of 5,000 K, and (4) two cameras with 620 TV line (TVL) resolution. Please click here to view a larger version of this figure.
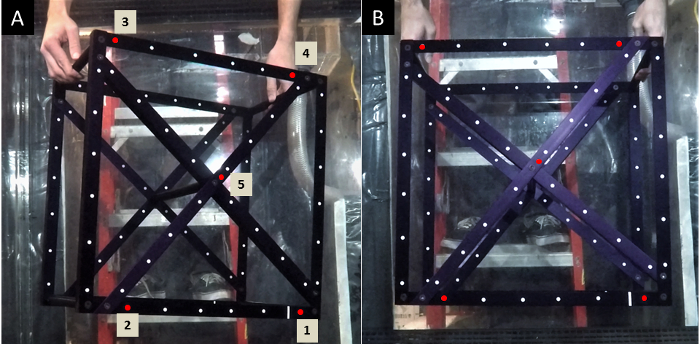
Figure 2: Calibration cube (500 mm x 500 mm x 300 mm). Example of a calibration with a 'calibration cube' shown in two different orientations: (A) the right side of the cube is pushed out towards cameras, and (B) the face of the cube is parallel to the face of the cameras. Red dots denote the reference points used in this particular calibration method and must always be identified in the numbered order. Please click here to view a larger version of this figure.
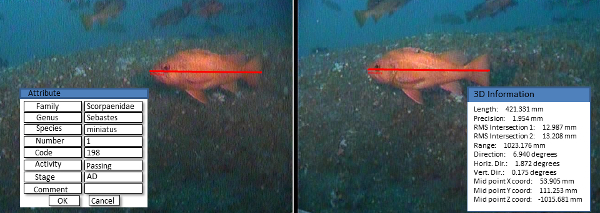
Figure 3: 3D measurement placed on Sebastes miniatus. The tip of the snout and end of the tail were identified in each camera frame to allow for stereo measurement. Please click here to view a larger version of this figure.
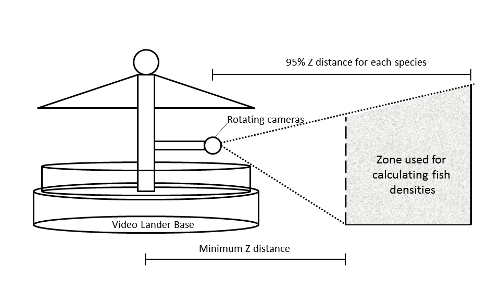
Figure 4: Area surveyed by the Lander tool. Effective area surveyed by the Lander tool was bounded by the minimum Z distance, and the 95% Z distance for each species. Note that this area created a 'donut' shaped survey volume around the Lander. Please click here to view a larger version of this figure.
Between 2013 and 2014, we conducted 816 surveys with the rotating stereo-video Lander (Figure 1) along the central California coast and collected MaxN and 95% Z distance (Figure 4) data on more than 20 species. There were clear patterns in the effective detectable range of species observed, likely due to the interaction of species' size, shape, and coloration (Figure 5). For instance, the Flag Rockfish (Sebastes rubrivinctus) has distinct banding on its sides allowing for confident identification at greater distances than other species of comparable size. Similarly, Canary Rockfish (Sebastes pinniger) are relatively large bodied, but have a pigmentation that is similar to other species, thus making it more difficult to identify at distance (Figure 5).
We use two species to demonstrate the calculations of both MaxN and 95% Z distance values: Pygmy Rockfish (Sebastes wilsoni) and Lingcod (O. elongatus). The former is a small-bodied fish that can be difficult to identify at distance; whereas O. elongatus is relatively large, has a distinct shape, and is more easily identifiable. From 2013 – 2014, 1,191 measurements for S. wilsoni and 1,222 measurements for O. elongatus were collected. Then, the 95% quantiles of distances at which these species were observed: the 95% Z distances were 2.65 m for S. wilsoni and 3.96 m for O. elongatus (Figure 5) were calculated. These 95% Z distances translate into effective survey areas of 18.6 m2 and 46.0 m2 for S. wilsoni and O. elongatus, respectively. A simple bootstrap analysis confirmed that sufficient sample sizes were obtained for characterization of 95% Z distance values. For both species, the estimate of 95% Z distance stabilized when greater than 50 surveys containing these species were sampled, providing strong evidence that the chosen sample sizes were more than adequate to characterize the effective Lander sample area for these species (Figure 6).
MaxN counts per survey were then converted into densities (number of fish/m2). We used density estimates from the 816 surveys to test the hypothesis that Lingcod and Pygmy Rockfish would be observed primarily on high relief habitats. For both species, there were significantly greater densities over high and medium relief compared with low relief habitats (Kruskal-Wallis, p <<.001; Figure 7). These results were consistent with previously reported habitat associations for both species15. There were no differences between medium and high relief habitat for either species.
To understand how the rotating Lander compared with traditional stationary camera systems, we estimated differences in density and variability estimates between a rotating and a simulated stationary Lander. We assumed a typical stationary single-camera Lander would have a 90-degree field of view. The rotating Lander has a 60-degree field of view, and requires 5 seconds of rotation to complete a 90-degree view. Using 261 surveys, we selected fish observation data from the middle 5 seconds of Lander rotations to establish MaxN. Density estimates for the pseudo-stationary Lander were standardized by using the reduced areas of coverage (i.e., approximately ¼ the area of the rotating Lander). Differences in mean density and coefficient of variation between rotating and pseudo-stationary Landers were evaluated with Welch's t-test. Mean densities obtained by the rotating camera were 18% greater than those obtained with stationary cameras (Welch's t21.7, p = 0.081, Figure 8A). Additionally, the coefficient of variation was 1.8 times greater with the stationary camera compared to rotating cameras (Welch's t15.1, p <0.001, Figure 8).

Figure 5: Z distances observed for select species. Red vertical bars denote the minimum Z distance (0.81 m from cameras) on the left and the 95% Z Distance value on the right. Note that this represents the average effective survey area around the Lander for each species. Please click here to view a larger version of this figure.
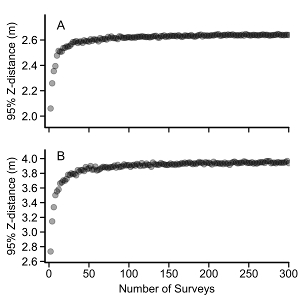
Figure 6: Bootstrapped Z distance values. Bootstrapping to increase the sample size for (A) S. wilsoni and (B) O. elongatus observations. Sample sizes ranging from 3 – 300 were bootstrapped 1,000 times each to calculate the mean 95% Z distance and verify the sample sizes were adequate. Note that the y-axis values range from 2.0 – 2.6 m for S. wilsoni and from 2.6 – 4.0 m for O. elongatus. Please click here to view a larger version of this figure.
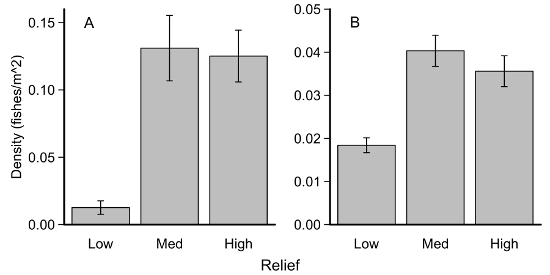
Figure 7: Habitat differences for two select species. Average densities (± SE) of (A) S. wilsoni and (B) O. elongatus measured on low, medium, and high relief rock habitat. Please click here to view a larger version of this figure.
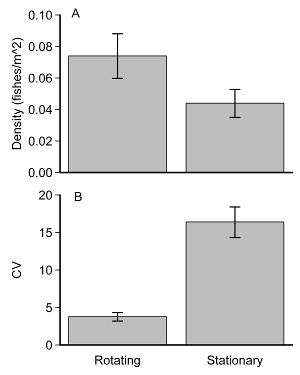
Figure 8: Differences between rotating and pseudo-stationary landers. Both estimates of (A) mean density (fishes/m2 ± SE) and (B) mean coefficient of variation (CV) ± SE for 261 surveys are presented. Please click here to view a larger version of this figure.
Supplementary Video 1: Calibration verification. Calibration can be verified before use in the field by measuring targets of known sizes at varying distances. Please click here to view this video. (Right-click to download.)

Supplementary Video 2: Underwater Survey Footage. Please click here to view this video. (Right-click to download.)
