Simultaneous Measurement of Turbulence and Particle Kinematics Using Flow Imaging Techniques
Summary
The technique described herein offers a low cost and relatively simple method to simultaneously measure particle kinematics and turbulence in flows with low particle concentrations. The turbulence is measured using particle image velocimetry (PIV), and particle kinematics are calculated from images obtained with a high-speed camera in an overlapping field-of-view.
Abstract
Numerous problems in scientific and engineering fields involve understanding the kinematics of particles in turbulent flows, such as contaminants, marine micro-organisms, and/or sediments in the ocean, or fluidized bed reactors and combustion processes in engineered systems. In order to study the effect of turbulence on the kinematics of particles in such flows, simultaneous measurements of both the flow and particle kinematics are required. Non-intrusive, optical flow measurement techniques for measuring turbulence, or for tracking particles, exist but measuring both simultaneously can be challenging due to interference between the techniques. The method presented herein provides a low cost and relatively simple method to make simultaneous measurements of the flow and particle kinematics. A cross section of the flow is measured using a particle image velocimetry (PIV) technique, which provides two components of velocity in the measurement plane. This technique utilizes a pulsed-laser for illumination of the seeded flow field that is imaged by a digital camera. The particle kinematics are simultaneously imaged using a light emitting diode (LED) line light that illuminates a planar cross section of the flow that overlaps with the PIV field-of-view (FOV). The line light is of low enough power that it does not affect the PIV measurements, but powerful enough to illuminate the larger particles of interest imaged using the high-speed camera. High-speed images that contain the laser pulses from the PIV technique are easily filtered by examining the summed intensity level of each high-speed image. By making the frame rate of the high-speed camera incommensurate with that of the PIV camera frame rate, the number of contaminated frames in the high-speed time series can be minimized. The technique is suitable for mean flows that are predominantly two-dimensional, contain particles that are at least 5 times the mean diameter of the PIV seeding tracers, and are low in concentration.
Introduction
There exist a large number of applications in both scientific and engineering fields that involve the behavior of particles in turbulent flows, for example, aerosols in the atmosphere, contaminants and/or sediments in engineered systems, and marine micro-organisms or sediment in the ocean1,2,3. In such applications, it is often of interest to understand how the particles respond to turbulence, which requires simultaneous measurement of the particle kinematics and the fluid dynamics.
Existing technologies to measure particle motions, called particle tracking (PT), which tracks individual particle trajectories, and the statistical technique of particle image velocimetry4,5 (PIV), used to measure flow velocities, both incorporate non-intrusive optical techniques. The main challenge in using these non-intrusive optical techniques to measure both the flow and particle kinematics simultaneously is the separate illumination required for each imaging technique that cannot interfere with the other's measurement accuracy (e.g., the illumination source for measuring the particle kinematics cannot act as a significant noise source in the fluid velocity measurement and vice-versa). The image contrast in both sets of images needs to be sufficient to obtain reliable results. For example, the PT images are converted to black and white images in order to perform a blob analysis to determine particle positions; thus, insufficient contrast leads to errors in particle position. Poor contrast in PIV images amounts to a low signal-to-noise ratio that will cause inaccuracies in estimation of the fluid velocities.
Here, a relatively low cost and simple method to simultaneously measure both particle kinematics and flow velocities is described. Through use of a high-power monochromatic light emitting diode (LED) line light, where the line refers to the light aperture, and dual-head high-intensity laser, both the particles of interest and the flow field are imaged in the same region simultaneously. The high power of the LED is sufficient for the imaging of the (tracked) particles by the high-speed camera but does not impact the PIV images because the light intensity scattered from PIV tracers is too low. When the dual-head high-intensity laser illuminates the flow field for the PIV images, it occurs over a short time interval and these images are easily identified and removed from the time series obtained by the high-speed PT camera when they are registered. PIV laser pulses recorded in the high-speed image (used for particle tracking) time series can be minimized by not running the two systems at frame acquisition rates that are commensurate with each other. In more advanced setups, one could externally trigger the PT and PIV cameras with a delay that would ensure this does not happen. Finally, by careful consideration of the amount of particles being tracked within the PIV field of view (FOV), any errors introduced by these tracked particles in the correlation analysis of PIV images are already taken into account by the overall error estimation, including errors associated with non-uniform size distribution of PIV tracers within the interrogation window. The vast majority of the PIV seeding tracers are following the flow, yielding accurate flow velocity estimates. These techniques enable the simultaneous direct measurement of both the particle kinematics and flow field in a two-dimensional plane.
This technique is demonstrated by applying it to determine particle settling characteristics in a turbulent flow, similar to that used in studies by Yang and Shy6 and Jacobs et al.7. Particle settling is the final stage in sediment transport, which generally consists of sediment suspension, transport, and settling. In most prior studies that have addressed particle settling in turbulent flows, either particle trajectories or turbulent velocities are not directly measured but inferred theoretically or modeled8,9,10. Details on the interactions between particles and turbulence have most often been investigated using theoretical and numerical models due to the experimental limitations in measuring both simultaneously6,11. We present a particle-turbulence interaction case study in an oscillating grid facility, where we study the settling velocity of particles and their coupling with turbulence. For clarity, hereafter we will refer to the particles under investigation as "particles" and the seeding particles used for the PIV technique as "tracers"; additionally, we will refer to the camera used for the high-speed imaging of the particle trajectories as the "particle tracking", "PT", or "high-speed" camera, which measures "high-speed images" and the camera used for the PIV method the "PIV camera", which measures "images". The method described herein enables the simultaneous measurement of particles kinematics and fluid dynamics over a pre-defined field of interest within the facility. The obtained data provides a two-dimensional description of the particle-turbulence interaction.
Protocol
Note: All personnel should be trained in the safe use and operation of Class IV lasers as well as in the safe use and operation of hand and power tools.
1. Experimental Set-up
- PIV setup
- Set up the dual-head laser and optics.
- Place the laser on an optical plate. Level the laser with respect to the bottom of the facility (or with respect to the ground if it is desired to have vertical velocities aligned with gravitational acceleration) and vertically align the laser beam with the center of the 2D plane to be imaged.
- Place the cylindrical lens in the path of the laser beam by securing it to the optical plate. The lens will form the beam into a 2D plane. The size of the 2D plane imaged will depend on the focal length of the lens and distance from the region to be investigated. Adjust the lens and distance until the region illuminated is sufficiently large for the specific application.
- Place a spherical lens on the optical plate between the cylindrical lens and the 2D image plane. The distance between the spherical and cylindrical lenses and the focal length of the spherical lens will determine the thickness of the 2D plane illuminated (light sheet). Adjust this distance and the focal length of the lens until the light sheet is approximately 0.5-1 mm thick.
- Position and perform preliminary calibration of the PIV camera.
- Attach a lens to the PIV camera, turn-on the PIV camera in free/continuous mode, and coarsely focus the PIV camera. Adjust the f-stop of the PIV camera to allow sufficient light to be received by the imaging sensor; this f-stop setting may differ when using the room’s white light versus the laser-based illumination.
- Adjust the lens and distance until the size of the image is sufficient to observe the region of interest. Selection of the lens and the distance between the PIV camera and the light sheet determines the physical size of the PIV camera’s image. Ideally, the size of the image should be smaller than (or similar to) the size of the light sheet setup in 1.1.1.
- Ensure the PIV camera is perpendicular to the light sheet and coarsely adjust the height such that the region of interest (defined by the light sheet boundaries – see step 1.1.1) is within the PIV camera’s field-of-view (FOV).
- Level the PIV camera with respect to the bottom of the flow facility (or with respect to the ground if it is desired to have vertical velocities aligned with gravitational acceleration). It is of utmost importance that the PIV camera be precisely perpendicular to the light sheet, so this should be checked thoroughly.
- Turn off the PIV camera and turn on the laser. Place a calibration target and align it with the center of the light sheet, then turn off the laser.
Note: The calibration target is a two-dimensional plate (commonly made of metal for rigidity purposes), containing multiple markers (e.g., points or crosses) aligned in a regularly spaced grid formation. The plate is usually painted black with white markers. The known distance between the markers enables estimation of a conversion factor between physical units and pixels. - Turn the PIV camera back on and refine the focus of the PIV camera on the calibration target. The pixel resolution of the PIV camera will determine how well the region can be resolved in space; thus, it should be considered (see steps 2.1.1 and 2.1.4 for details on these considerations).
- Capture one image. Confirm the PIV camera is level by ensuring that the height across a row of the calibration target is consistent as well as that the horizontal position along a column of the calibration target is consistent. Check the size of calibration markers in each corner of the image (in pixels) in order to evaluate the amount of image distortion, which should be minimized. The difference in size of calibration markers at each of the four corners should ideally be zero; but should not differ by more than 1 pixel.
- Attach a lens to the PIV camera, turn-on the PIV camera in free/continuous mode, and coarsely focus the PIV camera. Adjust the f-stop of the PIV camera to allow sufficient light to be received by the imaging sensor; this f-stop setting may differ when using the room’s white light versus the laser-based illumination.
- Add PIV tracers to the flow.
- Select suitable tracers that are neutrally buoyant (similar density as the fluid), chemically inert, appropriate size and shape (spherical and small enough to follow the flow) and have a high index of refraction relative to the fluid12,13.
Note: In the presented case study where the fluid is water, we have used hollow glass spheres with a mean diameter of 10 μm and density of 1.1 g/cc. - Introduce the PIV tracers into the flow and run the facility (oscillate the grid) until they are well mixed. Incrementally introduce the tracers and evaluate the image quality and level of tracers’ density within it.
Note: A large separation between tracer gray level intensity and the background intensity is optimal.- Evaluate by turning on the laser and collecting images in free/continuous mode. The tracers’ concentration in the image should be dense but not speckled4,14. Consider the size of the desired correlation window in selecting concentration level, as it is suggested to have around 8-10 clear particle pairs in the PIV image pairs for the cross-correlation analysis4 (see step 2.1.1).
- Select suitable tracers that are neutrally buoyant (similar density as the fluid), chemically inert, appropriate size and shape (spherical and small enough to follow the flow) and have a high index of refraction relative to the fluid12,13.
- Set up the PIV parameters. The PIV parameters consist of the PIV camera frame rate (which is the same as the laser dual-pulse repetition rate), the timing between image pairs (i.e., timing between consecutive (dual) laser pulses), and the number of image pairs to collect. Refinement of these settings may be needed after review of the results from step 1.1.5.
- Set the timings of the PIV camera and laser (frame rate). These determine the time resolution of the sampled velocity vector maps and should be as high as possible (limitation of PIV camera, laser, or hard-disk space) up to half the smallest time scale of the flow.
- Set the timing between consecutive PIV images (i.e., a PIV image pair).
- Set the timing between consecutive PIV images based on the average flow speed in the facility and the size of the interrogation windows (see 2.1.1). Have the tracers displace approximately 1/4-1/2 of the interrogation window size in the time elapsed between consecutive images. The time between consecutive images also sets the timing between the two laser pulses.
- Pre-define the first pulse to fire a short time after the PIV camera's shutter has opened. If using a cross-correlation PIV camera, the PIV camera stores the image in its buffer memory and re-opens the shutter again.
- Fire the second laser pulse based on the time setup herein. Once the second pulse fires, the camera’s shutter will close again, sending both images to the frame grabber (or on-board PIV camera memory).
- Determine the time between the first pulse that triggers the acquisition of the first image of the image pair and the first pulse that triggers the acquisition of the first image of the subsequent image pair by the PIV camera frame rate (see 1.1.4.1).
- Set the number of image pairs to collect. The number of image pairs to collect should be selected to ensure convergence of statistical flow properties, which depends on the experimental setup but is typically in the range of hundreds to thousands of image pairs.
- Test the PIV setup.
- Set the laser to external trigger mode for both laser heads and increase the laser power. Completely darken the room.
- Initiate data collection in synchronized continuous mode for a couple seconds.
- Stop data collection.
- Cross correlate image pairs collected (see 2.1.1).
- If the percentage of good vectors passing the signal-to-noise ratio (ratio of the highest cross correlation peak to the second highest cross correlation peak – see 2.1.1) is not in the upper 90% range or average tracer displacements within interrogation windows are not approximately 0.25-0.5 of the interrogation window size, repeat and verify correct implementation of steps in section 1.1 until it is achieved. Once these values are achieved, stop the facility (stop grid oscillation).
- Set up the dual-head laser and optics.
- Setup 2D high-speed particle tracking
- Position the monochromatic LED line light.
- Choose the LED line light such that it illuminates the particle under investigation (e.g., sediment particles) with large backscattered intensity (large difference in index of refraction of the particle with respect to the fluid). It should also be able to illuminate continuously or at a rate that can be synchronized with the PT camera.
- Minimize the thickness of the line light to ideally match the PIV light sheet thickness, but not to be more than 10 times thicker than the PIV light sheet thickness in order to reduce any ambiguity due to out-of-plane particle motion.
- Size the width of the LED line light to match or encompass the PIV FOV. Mount the LED perpendicular to the light sheet generated by the laser so that there are no issues of light blockage (e.g., PIV light sheet from the side and the LED from the bottom). See Figure 1.
- Align the LED line light such that the PIV light sheet thickness is centered within the LED line light thickness. Only adjust the positioning of the LED light to achieve this alignment. Movement of the PIV light sheet will require repeating steps in section 1.1.
- Position and perform preliminary calibration of the high-speed PT camera.
- Attach a lens to the PT camera, turn on the PT camera in free/continuous/Live mode, and coarsely focus the PT camera. If needed, adjust the PT camera f-stop to allow sufficient light to be received by the imaging sensor of the PT camera; this f-stop setting may differ when using the room’s white light versus the LED-based illumination. Selection of the lens and the distance between the camera and the LED line light determines the physical size of the PT camera’s image. Ideally, the PT camera FOV will be smaller than (or similar to) the size of the area illuminated by the LED.
- Ensure the high-speed camera is perpendicular to the line light and coarsely adjust the height so that the region of interest is within the PT camera’s FOV and inclusive of the PIV FOV.
- Level the PT camera with respect to the bottom of the flow facility (or with respect to the ground if it is desired to have vertical velocities aligned with gravitational acceleration). It is of upmost importance that the PT camera be precisely perpendicular to the plane illuminated by the line light, so this should be checked thoroughly.
- Turn off the PT camera, turn on the line light, and place a calibration target aligned with the center of the line light, then turn off the line light.
- Turn the PT camera back on and refine its focus on the calibration target. Further refine the lens and distance until the size of the image is sufficient to observe the region of interest and be inclusive of the PIV FOV.
- Choose lens and distance such that the high-speed PT camera FOV is larger than the PIV FOV. This arrangement is necessary in order to ensure that the PIV camera and the high-speed PT camera do not physically block each other.
- Arrange the PT and PIV cameras vertically (stacked) or offset to the side of each other. It can be convenient to align one corner of the high-speed PT FOV and PIV FOV. The pixel resolution of the PT camera will determine how well the region can be resolved in space; thus, it should be considered. The conversion factor between physical units and pixels determines the physical distance covered by one pixel. The particles should displace approximately 3-10 pixels between consecutive images, and if this displacement is too large (or small) because the FOV is too small (or too large) or the number of pixels is too large (or too small) then particles may not displace an ideal number of pixels between images (also see 1.2.3.2).
- Select particles for investigation.
- Use particles of interest much larger than the PIV seeding tracers in order to sufficiently distinguish between the investigated particles and the PIV tracers. We have been successful with particles approximately 5 times larger than the PIV tracers and consider this the lower limit but the limit can depend on the particle refractive indices and light sources. The investigated particle should encompass around 4-5 pixels in area in the high-speed camera image. Therefore, the size of the investigated particles can allow for less pixel resolution for the high-speed image than the PIV images.
- Repeat steps 1.2.2.1-1.2.2.5 as needed to achieve this step.
- Acquire one image of the calibration target. Confirm the PT camera is level by ensuring that the height across a row of the calibration target is consistent and that the horizontal position along a column of the calibration target is consistent. Also check the size of calibration markers in each corner of the image in order to evaluate the amount of image distortion, which should be minimized (not differ by more than 1 pixel).
- Set the high-speed camera parameters. The high-speed camera parameters consist of the frame rate of the PT camera (in this case also setting the exposure time), the PT camera resolution (full frame or binning the pixels to increase the frame rate or extend the acquisition time), and the number of images collected.
- Set the number of images to be collected (i.e., length of acquisition time). The number of images collected influences the number of particle trajectories measured—the longer the acquisition time, the more trajectories that can be measured.
- Set the frame rate (and exposure time) and resolution of the high-speed PT camera.
- Avoid setting the high-speed image acquisition rate to the same or multiple of the PIV frame rate. Set the frame rate based on the estimated speed of the particles in the flow. The particles should displace more than 1 or 2 pixels in order to avoid instances of overlapping particle positions in two consecutive images; however, a large gap (>10 pixels) will result in less confidence in identifying the same particle in consecutive images, yielding loss of particle trajectory (see 2.2.4). Adjust the PT camera resolution and frame rate to achieve particle displacements in this range (3-10 pixels).
- Test the high-speed camera setup.
- Turn-on the LED line light and otherwise darken the room.
- Run the facility (start oscillating the grid).
- Introduce the particles into the flow and capture a few frames after the particles appear in the high-speed camera’s FOV. Overlay consecutive frames and evaluate whether particles in consecutive frames can be distinguished.
- Check that the introduction of particles to the high-speed camera’s FOV occurs sufficiently far from the FOV that entrance effects are negligible, that the density of particles is sparse enough that there are not frequent instances of overlap of particles within the high-speed image FOV, and that particle motion is primarily in the plane imaged so that the particles are traceable by eye in the camera FOV/PT camera image history.
- If these results are not obtained, then repeat 1.2 until it is achieved. Once achieved, stop the facility (stop grid oscillation).
- Position the monochromatic LED line light.
- Combined Final Calibration
- Position the calibration target in both PIV and PT camera FOVs and within both the LED and PIV light sheets. The calibration target should be viewable by both the high-speed PT camera and PIV camera. Verify that both cameras are in focus. If one is not in focus, then steps 1.1 and 1.2 need to be repeated for the PIV camera and high-speed camera, respectively.
- Ensure that at least one unique mark exists on the calibration target that is viewable by both the high-speed camera FOV and the PIV camera FOV. Measure and denote the position of this unique mark in physical space for purposes of spatial registration between the images.
- Calibrate the high-speed camera by capturing and saving one image of the calibration target by the high-speed PT camera. Calibrate the PIV camera the same way.
- Remove the calibration target from the fluid.
- Data Collection
- Run the facility (oscillate grid) until it reaches steady state (~20 min).
- Set lighting conditions by darkening room and turning on the LED light. Add particles into the fluid.
- Synchronously start image acquisition for both systems when the first particles appear in the high-speed PT camera FOV (in live mode).
- Download the high-speed images from the RAM for the high-speed PT camera and save the images acquired by the PIV camera.
- Stop the facility (stop the grid oscillations).
2. Image Analysis
Note: There are numerous software packages available to perform both the PIV and PT image analysis – both commercial and freeware. For PIV analysis, freeware codes are OpenPIV (http://www.openpiv.net/) and MatPIV (http://folk.uio.no/jks/matpiv/index2.html). Commercial companies also sell PIV analysis software. For PT analysis, numerous particle tracking codes exist in both 3D and 2D such as Particle Tracker (https://omictools.com/particle-tracker-tool); a full listing of various software platforms can be found here: https://omictools.com/particle-tracking-category or http://tacaswell.github.io/tracking/html/. Most analysis packages, e.g., MATLAB, have built in tools that make it relatively easy to implement your own tracking code. For the results presented in this study, OpenPIV, TSI Insight, and MATLAB custom-written tracking codes were used.
- Analyze PIV Images
- Divide each image into a grid of interrogation windows (e.g., 64×64 pixels2 with 50% overlap) over which the average flow velocity at each window is computed by cross-correlating two consecutive PIV images (i.e., PIV image pair) as discussed in the PIV setup, section 1.1.4.2.
Note: The distance between the peak correlation in each window and the center of the window defines the average tracer displacement in that window. Once calibrated, this displacement divided by the time between consecutive PIV images (PIV image pair – see step 1.1.4.2) yields estimates of the two in-plane components of velocity at each location4. Collectively, it is referred to as a velocity vector map. The size of the interrogation window determines the resolution of the flow field produced by the PIV analysis as half of this distance is the computed velocity vector spacing. This spacing together with the pixel to physical unit conversion factor sets the resolution of the measured flow field. Additionally, to obtain low numbers of erroneous vectors (see 2.1.2), a sufficient number of tracers must be present in each window (at least 8-10 tracers) and they must not displace more than about ¼ to ½ of the window size. - Filter results of the cross-correlation to remove spurious results from the velocity vector maps.
- Apply a signal-to-noise (SNR) filter. Requiring a ratio of 1.5 and above is typically used (this number may change based on the specific experimental conditions).
- Set the SNR to be either the ratio between the first and the second highest correlation peak in the interrogation window or the ratio between the first and average correlation over the specific interrogation window. Optimize the SNR ratio for each set of experiments. The number of vectors failing this SNR check should not exceed 10%.
- Filter remaining erroneous vectors (not exceeding 5% between steps 2.1.2.2 and 2.1.2.3) using a global filter that compares each individual velocity vector with the velocity map mean plus or minus three standard deviations of the map velocities, and eliminates velocities outside this range.
- Filter remaining erroneous vectors (not exceeding 5% between steps 2.1.2.2 and 2.1.2.3) using a local filter that compares each individual velocity vector with the median velocity of a neighborhood of surrounding velocity vectors, typically 5 x 5 in size.
Note: Use of median and determining the neighborhood size may change depending on the specific experimental conditions.
- Apply a signal-to-noise (SNR) filter. Requiring a ratio of 1.5 and above is typically used (this number may change based on the specific experimental conditions).
- Replace erroneous vectors found in step 2.1.2 with interpolated vectors (or the neighborhood median) using information from the surrounding neighborhood vectors, typically of size 5 x 5.
- Determine the distance-to-pixel conversion ratio. Examine how many pixels translate to a specific distance using the distance between markers on the calibration target imaged in step 1.3.3.
- Calibrate vectors. Convert the vectors computed in steps 2.1.1-2.1.3 to physical units using this conversion factor from step 2.1.4 and the time between image pairs set in step 1.1.4.2; converting the displacements in pixels to velocities in physical units.
- Divide each image into a grid of interrogation windows (e.g., 64×64 pixels2 with 50% overlap) over which the average flow velocity at each window is computed by cross-correlating two consecutive PIV images (i.e., PIV image pair) as discussed in the PIV setup, section 1.1.4.2.
- Analyze High-speed Images
- Remove any frames from the high-speed image time series in which the PIV laser was illuminating the flow.
- Sum the intensity values of each frame acquired. The frames in which the PIV laser was flashing have a summed intensity that is much larger than those without the PIV laser active in the image. Based on a threshold on the summed intensity, remove any images from the time series that have a summed intensity greater than the threshold. See section 1.2.3.2 for guidance in minimizing the amount of frames for which this occurs.
- Convert remaining grayscale images into binary images using a threshold. In this case, we use Otsu’s method to determine the threshold that converts the particles to white and the background to black.
- Perform blob analysis for each image.
- Identify regions of connectivity in the black and white image – hereafter referred to as objects. Typically, a connectivity of 8 pixels is used.
- Remove any objects that are much smaller in area (i.e., number of pixels object consumes in the image) than the typical particle size in pixels in the image, typically around 3 pixels.
- Calculate the particle trajectories.
- Identify the centroid of all (remaining) objects in the first image.
- For each object detected, search the subsequent image for the same object by searching in a region near the centroid in the prior image. If only one particle/object within the search window is found, then continue the trajectory, and record the location of the centroid in that image; otherwise, terminate the trajectory.
Note: Too large of a search area can result in incorrect identification of the particle in the subsequent image so the search area should be as constrained as much as possible without causing bias in the results. If the object position in the subsequent frame is frequently at the maximum range of the search window, then the search window is not large enough. - Repeat step 2.2.4.2 until the object can no longer be found in the subsequent image. When this occurs, the trajectory is considered terminated.
Note: If the majority of particle tracks are consistently short (e.g., less than 5 frames), then this result could indicate that there is significant three-dimensional motion and that this method is not suitable. As a rule of thumb, particle tracks should be at least ¼ of the particle tracking FOV14; but necessity of particular track lengths can vary with application. - Repeat steps 2.2.4.1-2.2.4.3 starting with the second frame for any objects not already being tracked from frame 1. Repeat this process for all possible starting frames. The result will be a library of particle trajectories throughout the experiment.
- Remove any frames from the high-speed image time series in which the PIV laser was illuminating the flow.
3. Analysis
- Calculate particle velocities and accelerations from position trajectories obtained from the high-speed images used for the PT.
- Differentiate the particle trajectories complied in 2.2 in time (based on the frame rate set in step 1.2.3.2) to compute velocities in each direction. This time differentiation results in estimates of Lagrangian velocity of the particles in pixels per unit time.
Note: This step only needs to be performed if velocity information of the particles is desired. - Calibrate the velocities by converting the velocities from pixels per unit time to distance per unit time. The conversion factor (distance per pixel) can be obtained by examining the distance between markers on the calibration target imaged in step 1.3.3.
- Differentiate the particle trajectories complied in 2.2 in time (based on the frame rate set in step 1.2.3.2) to compute velocities in each direction. This time differentiation results in estimates of Lagrangian velocity of the particles in pixels per unit time.
- Perform Reynolds decomposition on PIV vector maps to compute turbulent quantities.
- Compute the ensemble mean over all PIV velocity vector maps collected at each location in the PIV vector maps obtained from step 2.1.
- Perform a Reynolds decomposition by subtracting these mean values computed in 3.2.1 from the instantaneous velocities in each map to obtain the time series of turbulent velocity fluctuations.
- Compute statistics of interest, for example, turbulent velocity root-mean-square (RMS). Alternatively, one could examine turbulent fluctuations at exact particle locations within the trajectories.
Representative Results
A schematic of the experimental setup is shown in Figure 1. The figure shows the arrangement of light sheets (LED and laser), the overlap in the FOVs, and the position of the FOVs relative to the oscillating grid and tank walls. The turbulence and particles are measured simultaneously as described in the protocol section. Figure 2 shows example results of the measurements of instantaneous velocity and vorticity along with sample particle trajectories. The results of the PIV analysis are evaluated based on computing the RMS of the turbulent fluctuations. For this oscillating grid facility, the magnitude of the spatial mean of the RMS velocity fluctuation over the PIV FOV should increase with grid frequency for both velocity components7,15. If this result is not obtained, then the grid facility, PIV setup, or PIV analysis contain errors and should be repeated. An example of the vertical profile of RMS velocity fluctuations for different grid frequencies is provided in Figure 3, where it is shown that the RMS turbulent fluctuations increase with grid frequency.
The particle trajectories are evaluated by examining the distribution of velocities obtained from the particle trajectories, as shown in Figure 4. These distributions should be approximately Gaussian in distribution. If they are not, then there may be a problem with the acquisition of the high-speed images depending on the specific flow conditions, an issue with the analysis of the high-speed images, or an insufficient number of particle trajectories. In this particular application of the method, the validation of the trajectory results can also be achieved by comparison to the Dietrich16 curves for stagnant water. Trajectory computations in still water using the same procedures outlined here for the particles should yield a settling velocity that is approximately consistent with these empirical curves as shown in Figure 5, where the results for the stagnant flow condition show agreement with the Dietrich16 curves. Figure 5 also demonstrates that particles tend to have increased settling speeds in turbulence as discussed in Jacobs et al.7.
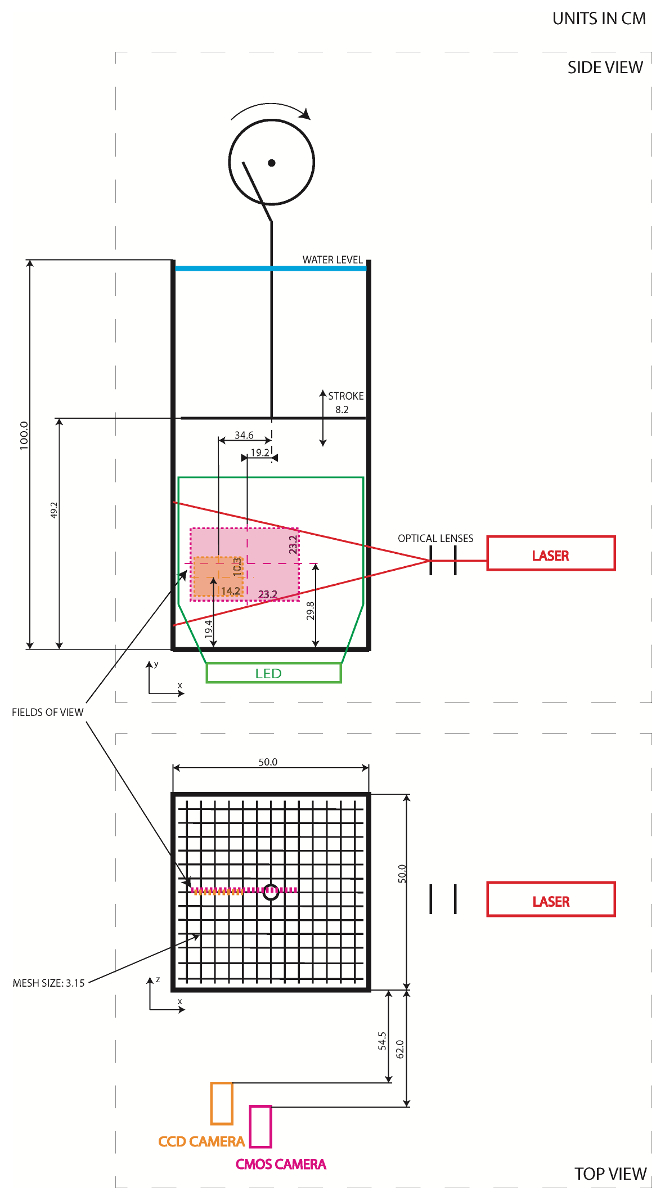
Figure 1: Schematic description of the experimental setup, which consists of a grid turbulence tank, particle image velocimetry setup (using a CCD (PIV) camera and laser), and 2D high-speed imaging particle tracking setup (using a CMOS (PT) camera and LED light). Dimensions on the schematic are provided in centimeters. This figure has been modified from that shown in Jacobs et al.7 Please click here to view a larger version of this figure.
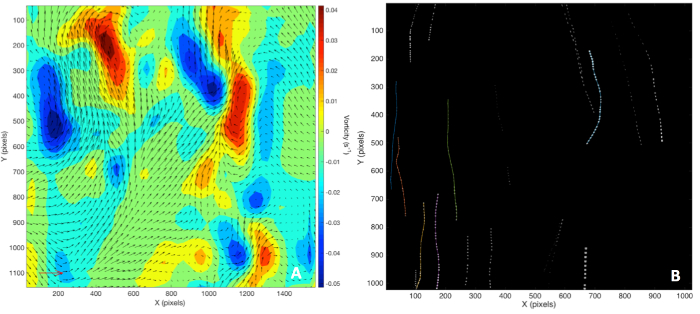
Figure 2: Velocity distribution and trajectories. (A) An example instantaneous fluid velocity distribution represented by vectors in pixels/s overlaid on instantaneous vorticity characterized by color. The red scale vector in the lower left corner represents 500 pixels/s. (B) An example of time-lapse (over 30 PT images) trajectories of particles with a 261 µm mean diameter at 5 Hz grid oscillations. Panel B of this figure has been modified from that shown in Jacobs et al.7 Please click here to view a larger version of this figure.
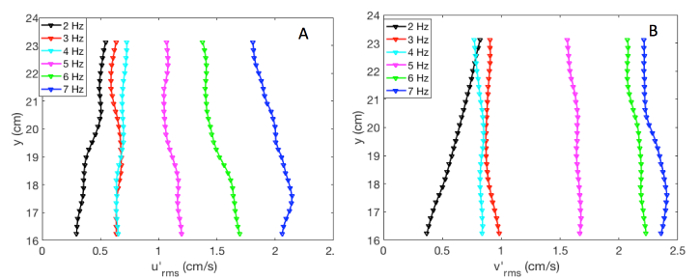
Figure 3: Horizontally averaged vertical profiles of the RMS of the (a) horizontal and (b) vertical turbulent fluctuations for all grid frequencies (see legend). Turbulent RMS velocities increase with grid frequency. RMS values are based on 500 vector maps computed at all locations and then subsequently averaged over all horizontal positions (50 points) at each vertical position to obtain the vertical profiles shown. This figure has been modified from that shown in Jacobs et al.7 Please click here to view a larger version of this figure.
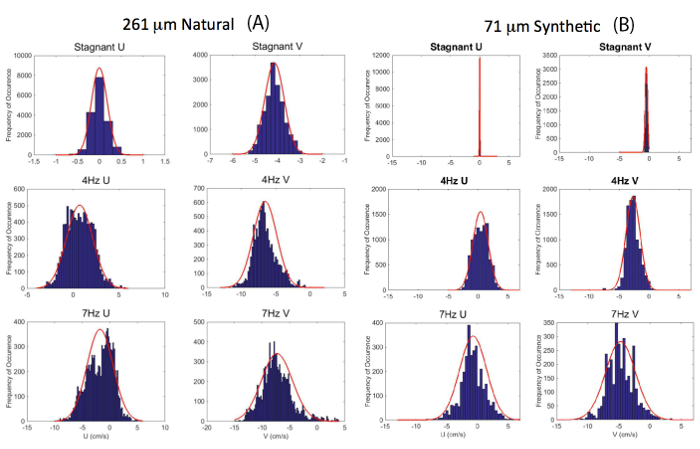
Figure 4: Histograms of the particles' measured horizontal and vertical velocities in stagnant water and turbulent conditions (see subtitles) for (A, left two panels) a natural (irregularly shaped) sand particle with 261 µm mean diameter and (B, right two panels) a spherical synthetic particle with a 71 µm mean diameter. The lines in the subplots are Gaussian fits to the histograms. This figure has been modified from that shown in Jacobs et al.7 Please click here to view a larger version of this figure.
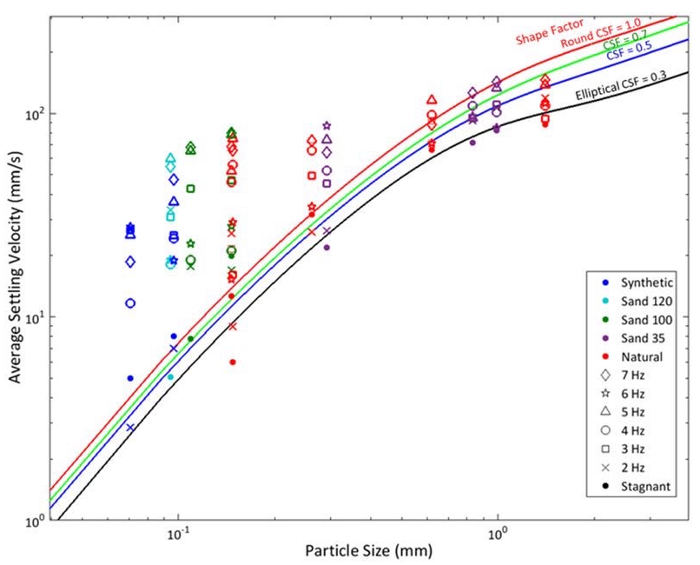
Figure 5: Settling velocities in stagnant and turbulent flow conditions versus particle size for several different types of particles. As illustrated in the legend, the colors represent different sediment types: synthetic or manufactured particles, several industrial sand types (120, 100, 35), and sand from a local beach in Myrtle Beach, SC-see Table 1 in Jacobs et al.7 for more details. The symbols, including the filled circle, indicate the flow conditions represented as grid frequency in the legend, where stagnant refers to zero frequency. As grid frequency increases, the RMS turbulent velocity fluctuations increase. The empirical curves of Dietrich16 for particle settling velocity in stagnant water are also shown for several different shape factors. This figure has been modified from that shown in Jacobs et al.7 Please click here to view a larger version of this figure.
Discussion
The method described herein is relatively inexpensive and provides a simple way to simultaneously measure particle trajectories and turbulence in order to examine the influence of flow on particle kinematics. It is noteworthy to mention that flows or particle motions that are strongly three-dimensional are not well-suited for this technique. The out-of-plane motion will result in errors17 in both the 2D tracking and the PIV analysis and should be minimized. In addition, the method requires the concentration of tracked particles to be relatively low (on the order of tens of particles per PT image). This restriction is important in order to maximize confidence that the same particle is being tracked in consecutive images. If too many particles exist simultaneously in the FOV of the PT camera, then inaccuracies in the trajectory calculations and early termination of trajectories can occur as well as increased errors in the PIV image analysis. Consequently, problems associated with particle flocculation would be challenging for this technique to investigate because large particle concentrations are usually needed. Finally, this technique is best suited for tracking larger particles (>50 µm). There must be sufficient separation between the PIV tracers (~10 µm) from the particles that are being tracked. A factor of at least 5 is suggested.
The most critical steps in the protocol for the particle tracking are the calibration steps, selection of the frame rate, particle concentration in the images, and ensuring high signal-to-noise ratio in the high-speed images. The blob analysis requires conversion of the gray scale image to a black-and-white image upon which the particle trajectories are computed. If the contrast in the high-speed images is such that this conversion is difficult, then errors in the trajectories are likely because there will be uncertainty in identification of the particles. Insufficient particle displacement, too large of displacement between frames, or too many particles can lead to errors in the particle trajectories and/or early termination of particle trajectories. For the PIV, the calibration of the image size, setting of the time between image pairs, proper selection of the tracers, and detailed alignment between the PIV camera and the laser are the most important steps to ensuring a good result in the PIV correlation analysis, which is key for obtaining accurate statistics on the turbulence.
Here, we demonstrated the results of the technique by applying it to examine the settling velocity of various types and sizes of sediment particles in varying turbulent conditions. The results show a nearly Gaussian distribution of particle settling velocities (as well as horizontal velocities) of which the mean is considered a typical settling velocity for that particle in different conditions. The RMS of the turbulent velocity fluctuations show an increase with grid frequency as expected7,15 and are approximately uniform over the FOV vertical height (aside from one low turbulence case – 2 Hz grid frequency, see Figure 3). Together, these results demonstrate that the simultaneous measurement of the particles and flow field were successful. They also demonstrate that there are increased settling speeds with increasing turbulence7, which is consistent with the "fast-tracking" theory of particle settling behavior in turbulent flow11.
The utilization of the method herein is one example of addressing a scientific question involving particle-turbulence interaction; the method can be utilized in other research disciplines and applications. In addition to examining trends in a particular aspect of particle behavior in varying flow conditions, it is also feasible to examine the flow velocities at particular instances in time along the trajectory of a particle. The integration of the flow velocity information with the particle trajectory data depends on the specific question investigated and offers a potential wealth of information regarding particle kinematics in flows for a large range of applications. In summary, this technique offers a low-cost solution to simultaneous measurement of particle trajectories and turbulence relevant in a number of applications where fluid flow interacts with natural or man-made particulates.
Disclosures
The authors have nothing to disclose.
Acknowledgements
Portions of this work were supported by the II-VI Foundation and the Coastal Carolina Professional Enhancement Grant. We would also like to acknowledge Corrine Jacobs, Marek Jendrassak and William Merchant for help with the experimental setup.
Materials
| Optical lenses | CVI LASER OPTICS | Y2-1025-45, RCC-25.0-15.0-12.7-C, PLCC-25.4-515.1-UV | Other optics companies are acceptable. Spherical and cyclindrical lenses for generating PIV light sheet. |
| Camera lens for PIV | Nikon | Nikkor 105mm f/2D | Other camera lens companies are acceptable. Camera lens for PIV imaging. |
| Camera lens for high-speed | Nikon | Nikkor 50mm f/1.8D | Other camera lens companies are acceptable. Camera lens for high-speed imaging. |
| Dual-head pulsed laser | Quantel | EverGreen: 532nm, 70mJ@15Hz | Other laser companies are acceptable. Dual-head Pulsed-laser for PIV: Nd:YAG |
| LED line light | Gardasoft Vision, Ltd. | VLX2 LED Line Lighting – Green – GAR-VLX2-250-LWD-G-T04 | Other companies are acceptable. Line light for LED. |
| PIV seeding particles/tracers | Potters Industries | SPHERICAL Hollow Glass Spheres: 11 mm average diameter | Other companies are acceptable. PIV seeding particles |
| CCD cross-correlation camera | TSI, Inc. | POWERVIEW 11M: CCD, Double-exposure, 4008×2672 pixels @ 4.2 Hz with 12bit dynmic range | Other companies are acceptable. Double-exposurem, CCD camera for PIV imaging. |
| High-speed camera | Photron | FASTCAM SA3; Model 60K: 1024×1024 pixels @ 1kHz | Other companies are acceptable. CMOS camera for high speed imaging. |
| Synchronizer | TSI, Inc. | LASERPULSE SYNCHRONIZER 610036 | Other companies are acceptable. Synchronize the acquisition of the PIV camera and laser. |
| Calibration target | TSI, Inc. | Other companies are acceptable. Precision target for image calibration. |
References
- Maxey, M. R. The gravitational settling of aerosol particles in homogeneous turbulence and random flow fields. Journal of Fluid Mechanics. 174, 441-465 (1987).
- Good, G. H., Ireland, P. J., Bewley, G. P., Bodenschatz, E., Collins, L. R., Warhaft, Z. Settling regimes of inertial particles in isotropic turbulence. Journal of Fluid Mechanics. 759, R3 (2014).
- Ha, H. K., Maa, J. P. Y. Effects of suspended sediment concentration and turbulence on settling velocity of cohesive sediment. Geosciences Journal. 14 (2), 163-171 (2010).
- Raffel, M., Willert, C. E., Wereley, S. T., Kompenhans, J. . Particle image velocimetry: A practical guide. , (2007).
- Lu, L., Sick, V. High-speed particle image velocimetry near surfaces. Journal of Visualized Experiments. 76, e50559 (2013).
- Yang, T. S., Shy, S. S. The settling velocity of heavy particles in an aqueous near-isotropic turbulence. Physics of Fluids. 15 (4), 868-880 (2003).
- Jacobs, C. N., Merchant, W., Jendrassak, M., Limpasuvan, V., Gurka, R., Hackett, E. E. Flow scales of influence on the settling velocities of particles with varying characteristics. PLoS One. 11 (8), 0159645 (2016).
- Murray, S. P. Settling velocities and vertical diffusion of particles in turbulent water. Journal of Geophysical Research. 75 (9), 1647-1654 (1970).
- Nielsen, P. Turbulence effects on the settling of suspended particles. Journal of Sedimentary Research. 63 (5), 835-838 (1993).
- Kawanisi, K., Shiozaki, R. Turbulent effects on the settling velocity of suspended sediment. Journal of Hydraulic Engineering. 134 (2), 261-266 (2008).
- Maxey, M. R., Corrsin, S. Gravitational settling of aerosol particles in randomly oriented cellular flow fields. Journal of the Atmospheric Sciences. 43, 1112-1134 (1986).
- Melling, A. Tracer particles and seeding for particle image velocimetry. Measurement Science and Technology. 8 (12), 1406-1416 (1997).
- Hadad, T., Gurka, R. Effects of particle size, concentration and surface coating on turbulent flow properties obtained using PIV/PTV. Experimental Thermal and Fluid Science. 45, 203-212 (2013).
- Adrian, R. J. Particle-imaging techniques for experimental fluid mechanics. Annual Review of Fluid Mechanics. 23 (1), 261-304 (1991).
- Shy, S. S., Tang, C. Y., Fann, S. Y. A nearly isotropic turbulence generated by a pair of vibrating grids. Experimental Thermal and Fluid Science. 14 (3), 251-262 (1997).
- Dietrich, W. E. Settling velocity of natural particles. Water Resources Research. 18 (6), 1615-1626 (1982).
- Huang, H., Dabiri, D., Gharib, M. On errors of digital particle image velocimetry. Measurement Science and Technology. 8 (12), 1427 (1997).
