We created a sterilizable calibration target by etching a pattern of asymmetric circle on a sandblasted stainless steel metal sheet, whose design is shown in Figure 1. An exemplar setup showing this calibration target in action together with a fetoscope is shown in Figure 2. To feed this design into the laser etching software, a custom application was implemented in the Python programming language16. Creating the design pattern involves iteratively etching parallel lines on a metal sheet. For the pattern to have a consistent color in the end, the distance between these lines should be less than the width of the laser beam (see the inset of Figure 1)—this value is 45 µm for the Violino (Laservall) laser cutter.
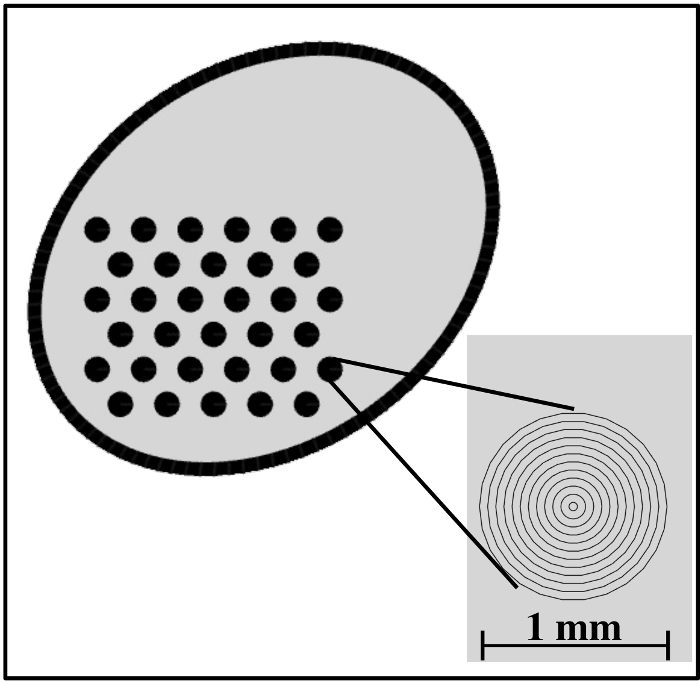
Figure 1: Design of the engraved pattern featuring a 3-by-11 grid of asymmetric circles. Inset: zoomed-in view of the grid of asymmetric circles. The distance between the lines is 45 µm (equal to the laser beam width), and each circle has a diameter of 1 mm. Other sizes could be used for the grid as well, but this was found to be optimal with respect to the fetoscope field of view. Please click here to view a larger version of this figure.
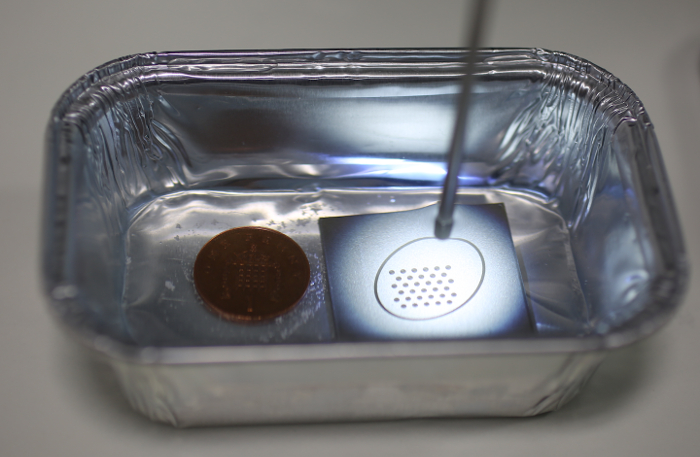
Figure 2: Exemplar setup with the calibration target in use. The tip of the water-immersed fetoscope is directed at the calibration target on the right. On the left is a British penny to provide scale information. Please click here to view a larger version of this figure.
The fabricated calibration target allows for the detection of the circular pattern in the endoscopic video stream with OpenCV17, whose locations are then sorted into the pre-defined asymmetric circular grid (see Figure 3). Using this information in conjunction with the already-known grid geometry, internal camera parameters can be estimated. These include the camera matrix and the distortion coefficients. The camera matrix consists of the focal lengths and the optical centers along the x- and y-axis of the 2D image plane. The distortion coefficients are based on the Brown-Conrady model3. Note that for this work, only the radial distortion parameters were estimated. For a brief discussion of the theory, with practical examples, see the webpage of the OpenCV camera calibration module17 and the MATLAB camera calibration toolbox22. More details about the camera calibration procedure are available in Zhang's work20. The endocal software repository features a sample dataset of 10 endoscopic views of the fabricated calibration target16. Using this dataset, a calibration with an average re-projection error of 0.28 pixels (min: 0.16, max: 0.45) was obtained. This is comparable to the 0.25 pixels reported by Wengert et al. using their custom calibration algorithm15. The same research group, however, reported a re-projection error of 0.6 pixels in a more recent paper when using the method in15 for calibrating an endoscopic camera used for placental mosaicing18.
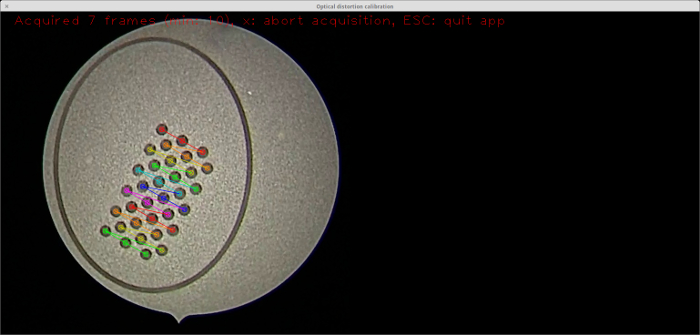
Figure 3: Real-time detection of the calibration pattern. A screenshot from the calibration application16 featuring the detected calibration pattern overlaid onto the live video stream using the virtual reality visualization from OpenCV17. Note that each detected column of the calibration pattern is emphasized by a different color. The detected circles, in conjunction with the known geometry, are used for computing the camera parameters. Please click here to view a larger version of this figure.
The estimated camera parameters are used for optical distortion correction. Figure 4 shows a rectangular chessboard pattern, as viewed using a fetoscope, where optical distortions make the lines appear as curves. Note that the lines appear normal in the distortion-corrected image.
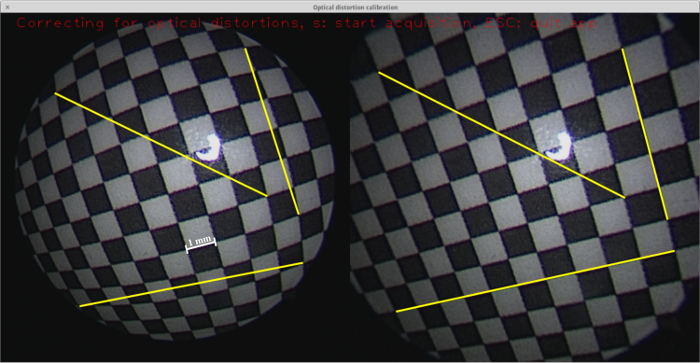
Figure 4: Optical distortion correction. A screenshot from the calibration application16 featuring the live video image from a fetoscope recording from the checkerboard pattern (left) with the distortion-corrected image (right). Three exemplary lines are drawn in both images, each from one corner to another, where the trajectory is linear. Due to the optical distortions, these lines appear as curves in the original fetoscope images. Please click here to view a larger version of this figure.
Sandblasting is an important step in the fabrication process because the raw metal surface prominently reflects the endoscope light, making it impossible for the circles to be detected. It is difficult to distinguish the circles even with the naked eye (see Figure 5). Note that the surface of the target shown was already etched with a laser. However, this does not diminish light reflection.
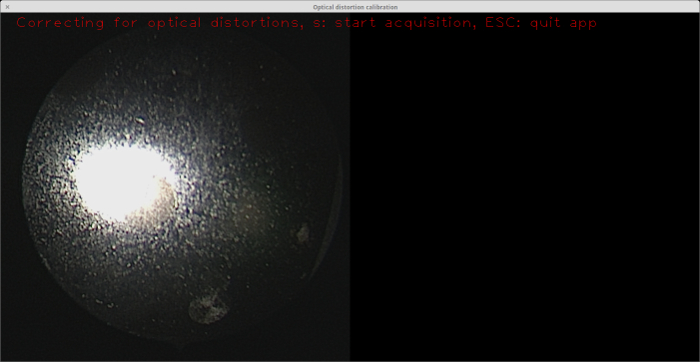
Figure 5: Calibration target with no sandblasting applied. As seen from the endoscope view on the left, the glare from the endoscope light on the material surface makes it difficult even for the naked eye to distinguish the circles (there is a circle just to the southeast of the large reflection). Note that the surface of this target (i.e., the "background") was already etched, but this is not helpful in the absence of sandblasting. Please click here to view a larger version of this figure.
Prior to pattern etching, it is also important to etch the surface of the whole sample. This is necessary because the sandblasted surface has many specular reflections (see Figure 6), which interfere with blob detection.
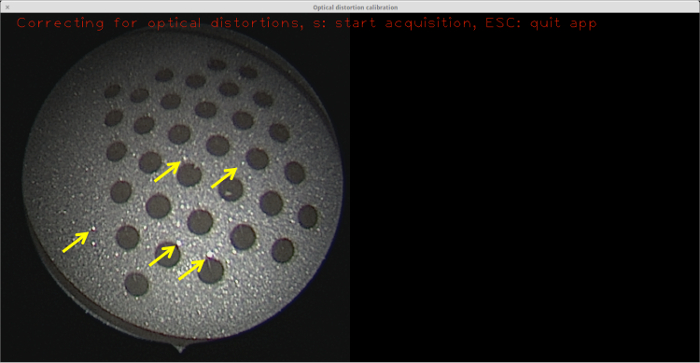
Figure 6: Sandblasted surface with no etching. Although not as prominent as the raw metal surface, the relatively small specular reflections (some of which are highlighted with yellow arrows) are still sufficient to prevent blob detection from succeeding, so no calibration can be performed with this target. Please click here to view a larger version of this figure.
Applying the laser at different speeds gives different background colors. The background color plays a significant role in the contrast between the circles and the background. Hence, it is vital to determine the optimal background color. For this purpose, a plate with circles etched against a set of different backgrounds was created (see Figure 7). The backgrounds were tested using the feature detection module of OpenCV23, which is used in the OpenCV camera calibration module17. In this work, the target was made of stainless steel, as it is the most common and reliable material used in clinics for medical devices. This material is freely available, not expensive, robust, and easy to sterilize. Other materials could potentially be used for the calibration target, such as aluminum or iodized metals, but this is the scope of future work.
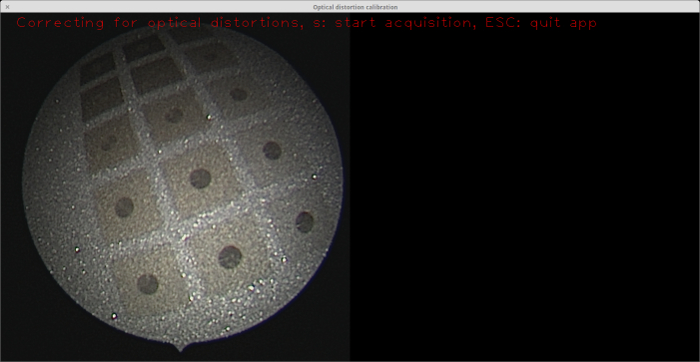
Figure 7: Stainless steel plate featuring a palette of different background colors etched with the laser. Practical experiments were conducted in conjunction with the OpenCV feature detection module to determine which background color gives the optimal result in terms of blob-to-background contrast23. The endoscope view on the left shows the plate. The moderate background colors (i.e., those other that the darkest and lightest ones) in this palette yield better blob detection. Please click here to view a larger version of this figure.
One of the advantages of this work is that performing a calibration using the fabricated target takes 2-3 min. Most of the effort goes to manually stabilizing the endoscope to obtain decent views of the calibration pattern. Using a custom-built endoscope holder could eliminate the need for manual stabilization, which in turn could significantly shorten calibration time.

Video 1: Video showing how optical distortion calibration can be performed using the developed calibration target together with the endocal software. Please click here to view this video. (Right-click to download.)
An advantage of our work compared to the work of Wengert et al.15 is that the OpenCV camera calibration module17 can be used as is for calibration, without requiring any modification or custom parameterization. Because OpenCV is a well-established and well-maintained software package and is very popular in the computer vision community, using it eliminates the need for writing and maintaining custom software. For the reader's convenience, a compact GUI application is provided16, which the reader can easily install and use to test new calibration targets. One disadvantage of our method compared to Wengert et al.15 is that their method is more robust to occlusions of the pattern, as it does not require the detection of all blobs.
Initially, a calibration target with a checkerboard pattern was fabricated for this work. However, this type of calibration target proved to be unsuitable in experiments due to the difficulty of detecting the corners of the checkerboard squares. Corner detection relies on histogram-based image binarization (see the OpenCV source code24). This implies the need for a clear color contrast between the dark and light squares, which could not be guaranteed with our checkerboard pattern, partially due to specular reflections, like the ones shown in Figure 6. Such specular reflections are present even after background etching; however, the detection of the circles seems to be less sensitive to this shortcoming.
In the current setup, only perpendicular views of the calibration target allow for successful blob detection. This is due to the specular reflections from the target surface hampering blob detection at oblique angles. We are working to further improve the target so as to allow for the acquisition of views at a wider range of angles, which could potentially improve the quality of performed calibrations20.
In the real-time placental mosaicing pipeline that was previously proposed11, the computation of the transformation that maps image pairs relies on the successful detection and grouping of features. Optical distortions, on the other hand, cause a group of features with a rigid geometry to appear different across images. As a consequence, this difference leads to inaccuracies in the computed transformations, which cause drifts in the resulting image mosaics. Because the most prominent optical distortions are present towards the edges, endoscopic images are currently cropped to their innermost regions. A good correction for optical distortions would potentially allow for the incorporation of a larger part of each image into the mosaicing process. The advantage of this method is two-fold. First, it would increase the number of detected features in each image, potentially improving the computation of the image transformations. Second, it would allow for the whole target anatomical surface to be reconstructed in a shorter time.
