Using the highly accurate optical 3D range flatbed scanner, the endplates were converted into more than 45,000 digital points, which adequately characterize the morphology (Figure 2A,B).
In the measurement protocol, the spatial analysis of endplate surfaces was conducted. Representative curves were fitted and quantified on the surface to characterize morphology (Figure 4B). The linear parameters were measured by calculating the distance between two endpoints. Measurements obtained include the concavity depth and concavity apex location in mid-sagittal plane, in addition to those of the whole endplate concavity and any specific section (Figure 5B). The components of endplates, epiphyseal rim, and central endplate were separated (Figure 5C), and their lengths and areas were obtained conveniently.
A total of 138 cervical vertebral endplates were digitized and analyzed, and the mathematical model of the endplate was established. The protocol sets the sums of squared error below 0.01, and it was concluded that using the four-order polynomial function could achieve satisfaction.
The parametric equation of each curve was deduced based on the coordinates of 11 points: f(x) = P1*x^4 + P2*x^3 + P3*x^2 + P4*x + P5. P1, P2, P3, P4 and P5 were the parameters, the exact values of which are shown in Table 1.
The parametric equation representing the morphological characteristics of endplate surface is:
F(x, y) = P00 + P10*x + P01*y + P20*x^2 + P11*x*y + P02*y^2 + P30*x^3 + P21*x^2*y + P12*x*y^2 + P03*y^3 + P40*x^4 + P31*x^3*y + P22*x^2*y^2 + P13*x*y^3 + P04*y^4
Where: PXYs are the parameters, which were deduced from the pre-measured coordinates of 66 points (Table 2).

Figure 1: The non-contact optical 3D range flatbed scanner. The scanner, which is based on heterodyne multifrequency phase shift 3D optical measurement technology, includes optical measurement (integrating around two cameras and a projector) and control devices. Precision of this instrument is 0.02 mm, and pixels are 1628 x 1236. The scanner can efficiently (input time 3 s) digitize the surface geometry of a target object. Please click here to view a larger version of this figure.
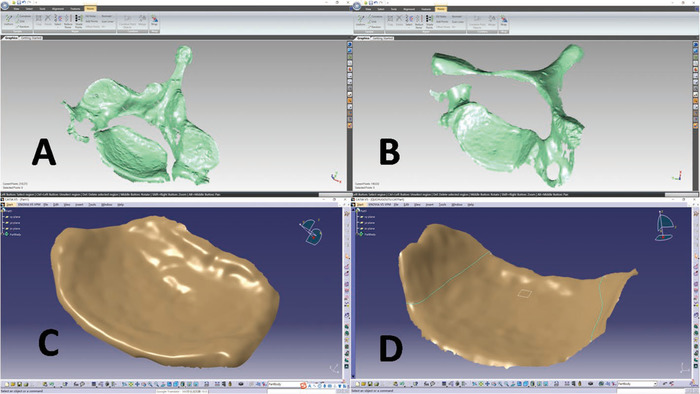
Figure 2: The point cloud of vertebral surface and 3D reconstruction of endplate. (A) and (B) are the inferior and superior surfaces of a cervical vertebra generated by the software specially used for processing point clouds, respectively. (C) and (D) are the 3D reconstruction of the inferior and superior endplates generated by the software specially used for 3D reconstruction and data processing, respectively. The posterior elements and osteophytes are removed from the vertebrae, leaving only the endplate. The best-fit plane is defined through the anterior-most and posterior-most points of the bilateral uncinate processes, and the two curves formed by the best-fit plane and endplate are the boundaries of the uncovertebral joint and caudal endplate. Please click here to view a larger version of this figure.
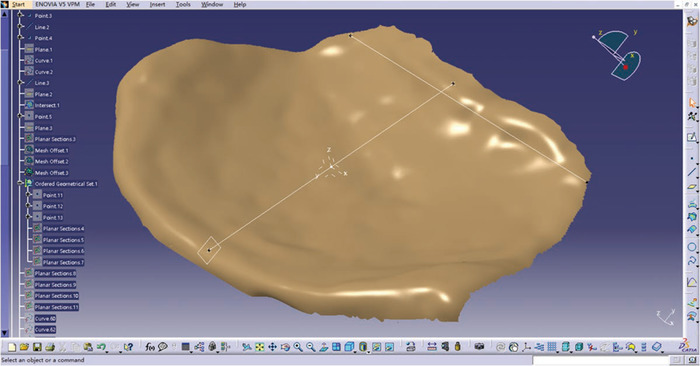
Figure 3: Definition of the endplate 3D coordinate system. Marking of three anatomic landmarks on the epiphyseal rim: the first two are the left and right endpoints of the endplate trailing edge, respectively; the third is the anterior median point. The posterior frontal line is formed by the two trailing edge endpoints, which define the mid-sagittal plane with the anterior median point. The posterior median point is determined by the mid-sagittal plane and posterior epiphyseal rim, which form the mid-sagittal diameter with the anterior median point. The origin is the midpoint of the mid-sagittal diameter. The y-axis is determined by mid-sagittal diameter and pointing forward. The x-axis is the line parallel to the posterior frontal line. The z-axis is normal to the x-y plane. Please click here to view a larger version of this figure.
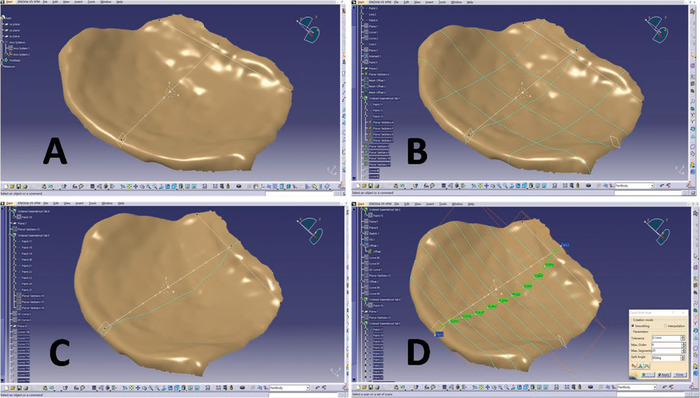
Figure 4: The steps of fitting characteristic curves and points on endplate surface. (A) Divide the mid-sagittal diameter and the mid-frontal diameter equally into four parts. (B) Go through every equidistant point, and choose six surface curves symmetrically, three of which are the intersection curves of the frontal plane and the endplate surface, and the other three in the sagittal plane. (C) Divide the mid-sagittal diameter equally into 10 parts. (D) Going through each equidistant point, the frontal planes and mid-sagittal curve form nine intersections, resulting in a sum of 11 points, together with the two endpoints. Please click here to view a larger version of this figure.
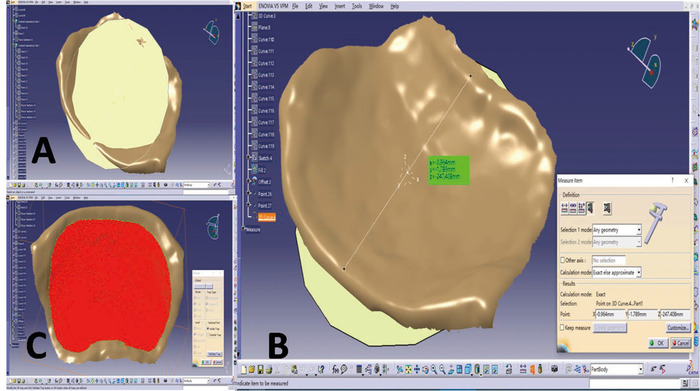
Figure 5: Measurement of endplate concavity depth and surface area. (A) Create a plane parallel to the x-y plane. (B) Offset the plane until it is tangent to the most concave point, and the endplate concavity depth is the perpendicular distance between the most concave point and x-y plane. (C) Draw a line along the inner margins of the epiphyseal ring to partition the endplate into the central endplate and epiphyseal rim. Please click here to view a larger version of this figure.
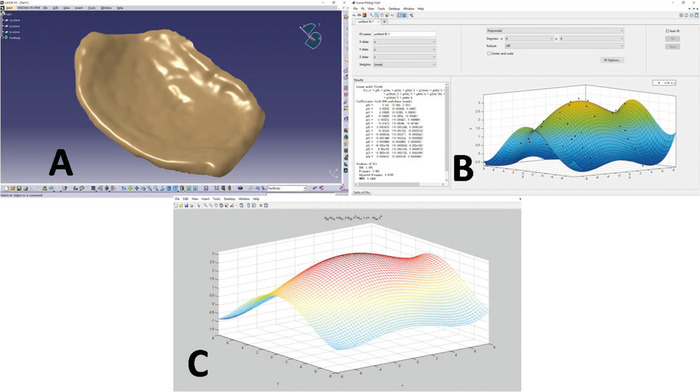
Figure 6: The 3D reconstruction and representations of an inferior endplate. (A) The 3D reconstruction of the inferior endplate surface generated by the software specially used for 3D reconstruction and data processing. (B) and (C) are the representations of the inferior endplate generated by the data analysis and visualization software. Please click here to view a larger version of this figure.
| Endplate Level | Curve | Parameters | ||||
| P1 | P2 | P3 | P4 | P5 | ||
| C6 superior | FAC | 0 | 0 | -0.0128 | -0.0028 | 0.02523 |
| FMC | 0 | 0 | -0.0199 | 0.00074 | 0.3693 | |
| FPC | 0 | 0 | -0.0329 | 0.00739 | 0.5323 | |
| SLC | 0 | 0.00176 | -0.0113 | -0.0419 | -0.0419 | |
| SMC | 0.00011 | 0.00232 | -0.016 | -0.0986 | 0.4712 | |
| SRC | 0 | 0.00179 | -0.0096 | 0.04451 | -0.0394 | |
| C6 inferior | FAC | 0 | -0.0001 | -0.0225 | 0.00594 | 1.223 |
| FMC | 0 | 0 | -0.016 | -0.0082 | 1.729 | |
| FPC | 0 | 0 | -0.0033 | -0.0033 | 1.404 | |
| SLC | 0.00012 | 0.00087 | -0.0347 | -0.0962 | 1.448 | |
| SMC | 0.00025 | 0.00064 | -0.0495 | -0.0331 | 1.846 | |
| SRC | 0 | 0.00079 | -0.0295 | -0.0828 | 1.362 | |
Table 1: The parameters of equation to represent the curve of endplate surface. Only the data of the sixth cervical vertebral endplate is listed. Px = the parameters of the equation. On each end plate, six surface curves were symmetrically chosen; three of these were in the frontal plane and termed the anterior curve (FAC), middle curve (FMC), and posterior curve (FPC); the other three in the sagittal plane were termed the left curve (SLC), middle curve (SMC), and right curve (SRC). Parameters with an absolute value of less than 0.0001 are represented as 0 here.
| parameters | C3 inf | C4 sup | C4 inf | C5 sup | C5 inf | C6 sup | C6 inf | C7 sup |
| p00 | 1.989 | 0.4187 | 2.004 | 0.3383 | 1.913 | 0.4276 | 1.779 | 0.5674 |
| p10 | -0.0022 | -0.0043 | 0.00542 | -0.0208 | -0.0111 | 0.0012 | -0.0043 | -0.0052 |
| p01 | -0.0356 | -0.0868 | -0.0537 | -0.0826 | -0.0257 | -0.098 | -0.0407 | -0.0642 |
| p20 | 0.01286 | -0.0252 | -0.0146 | -0.0299 | -0.0253 | -0.0264 | -0.0175 | -0.0088 |
| p11 | 0.00092 | 0.00071 | -0.0009 | 0.00018 | -0.0002 | -0.0012 | 0.00117 | 0.00021 |
| p02 | -0.0529 | -0.0151 | -0.0525 | -0.012 | -0.0418 | -0.0142 | -0.0396 | -0.0134 |
| p30 | 0 | -0.0001 | 0.00013 | 0.00024 | 0.00017 | 0 | 0 | 0 |
| p21 | -0.0011 | 0.00299 | -0.0012 | 0.00363 | -0.0021 | 0.00306 | -0.0019 | 0.00194 |
| p12 | 0 | 0.00048 | -0.0004 | 0.00033 | 0.00014 | 0 | -0.0001 | 0 |
| p03 | 0.00062 | 0.00204 | 0.00089 | 0.00206 | 0.00046 | 0.00208 | 0.00077 | 0.00115 |
| p40 | 0.0002 | 0 | 0.0002 | 0 | 0.00024 | 0 | 0 | 0 |
| p31 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| p22 | 0.00017 | 0.00013 | 0 | 0.00015 | 0.00015 | 0.00017 | 0.00032 | 0 |
| p13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| p04 | 0.00023 | 0.00013 | 0.00024 | 0 | 0 | 0 | 0 | 0 |
Table 2: The parameters of parametric equation representing the morphology of endplate surface. Px = the parameters of the equation; inf = inferior endplate; sup = superior endplate. Parameters with an absolute value of less than 0.0001 are represented as 0 here. This table has been modified from a previous publication3.
| Measurements | Intratest reliability | Measurements | RE vs Caliper | ||
| APD | First-remeasurement | 15.76±1.3 | APD | RE | 16.47±1.31 |
| Remeasurement | 15.86±1.61 | Caliper | 16.26±1.27 | ||
| ICC | 0.85 | Cronbach alpha | 0.99 | ||
| CMD | First-remeasurement | 19.71±2.47 | CMD | RE | 20.7±3.05 |
| Remeasurement | 19.41±2.43 | Caliper | 20.45±3.21 | ||
| ICC | 0.96 | Cronbach alpha | 0.99 | ||
Table 3: Reliability of measurements. Data were mean ± standard deviation (mm). ICC = intra-class correlation coefficient; APD = antero-posterior diameter; CMD = center mediolateral diameter; RE = the reverse engineering system. This table has been modified from a previous publication.3
| Measurements value | N | Z coordinate value | T | P | R |
| Original points | 15 | 1.75±0.87 | 0.26 | 0.8 | 0.98 |
| Comparison points | 15 | 1.74±0.91 |
Table 4: The validity of the geometric model representing the endplate morphology. Data are represented as mean ± standard deviation (mm). The original points are 15 randomly selected points on the original 3D reconstruction image. Comparison points = corresponding points auto-generated from parametric equations; R = correlation coefficient.
