The process described above yields a robotic model of a California sea lion foreflipper. The model can be used in two different ways. One is by actuating the flipper only at the root (Figure 6a). In this case, the driving motor sets the rotational rate of the first joint, but the resulting motion of the flipper is determined by the fluid-structure interaction between the flexible flipper and the surrounding water. Additionally, we can create robotic flippers that are actuated at the two lower joints in addition to the root (Figure 6b). This is done through the tower structures printed onto the skeleton pieces. Wires connected to the towers are connected to separate motors and can actively control the camber of the flipper during the clapping motion.
The purpose of the robotic flipper is to explore the hydrodynamics of the propulsive stroke of the California sea lion as described in Friedman, 20141. One way to do this, qualitatively, is through dye-based flow visualization. The robotic flipper is mounted to a recirculating water flume (Figure 7), using the assembly described above. The motor and flow speed, are set to explore a given parameter space—such as the Reynolds number based on the flipper chord (Re = cU/ν where ν is the dynamic viscosity of water) or angular velocity, ω, or acceleration, α.
The dye visualization shown in Figure 9 uses fluorescent dye injected just upstream of the leading edge of the flipper. The dye is entrained into the shear layer at the surface of the flipper and allows us to visualize the vortex structure of the wake. Figure 9a shows the stream of dye being injected upstream (to the right), of the flipper. The disturbances seen on the left side of the image are the result of the previous cycle. As the flipper moved through the injection location (Figure 9b), low pressure on the upper surface of the flipper causes the dye to be pulled around the flipper. Finally, (Figure 9c), a vortex forms as the flipper moves fully out of the plane. This structure convects downstream with the mean flow. These results demonstrate how this technique can be used to qualitatively determine the flowfield surrounding a sea lion during the propulsive stroke.
In addition to the qualitative measurements of the flipper wake, we can use particle image velocimetry (PIV) to measure the velocity field surrounding the flipper. Thus, we can obtain qualitative data about the hydrodynamics of sea lion swimming for a variety of reproducible situations.
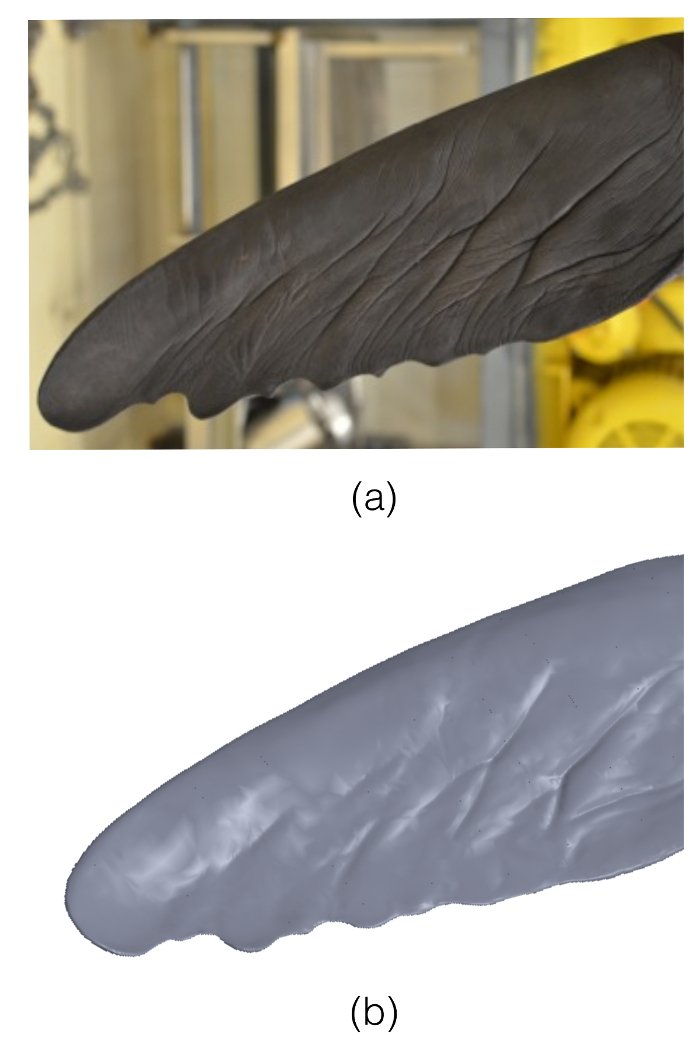
Figure 1: Flipper Bottom Comparison. A left foreflipper from a specimen of a female California sea lion is used to determine the robotic flipper's geometric parameters. The top panel (a) is a high resolution, two-dimensional image of the flipper. The lower panel (b) is a three-dimensional, computer-aided design rendering of the flipper from the laser scan. Please click here to view a larger version of this figure.
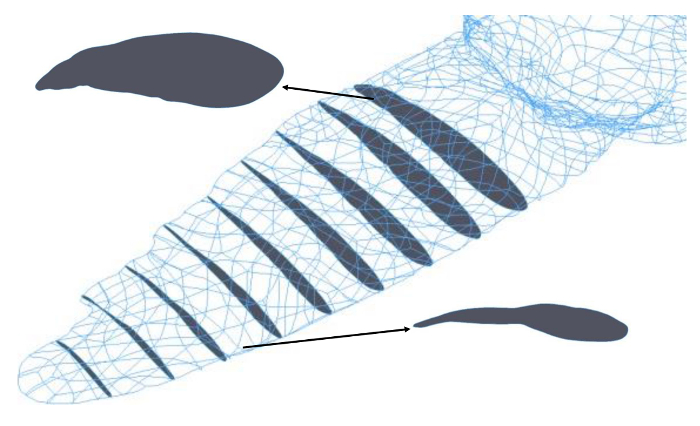
Figure 2: Wire. The digital image of the scanned flipper retains the geometric features of the animal's foreflipper. This image shows a wire-frame view of the digital flipper. Nine evenly spaced cross sections are shown in grey (every centimeter from the base to the tip of the foreflipper). The two isometric views (cross section 1 and 7) show that the flipper has an airfoil-like shape, with a thicker, rounded leading edge. The flipper is cambered, with its upper surface more convex and its inner surface concave. Please click here to view a larger version of this figure.

Figure 3: Mold. The mold used to create the flexible portion of the robotic flipper is created from the scanned flipper specimen. The mold has two parts: an upper (purple) and a lower section (green) that are aligned with male and female posts, respectively. The robot skeleton (Figure 4) is aligned inside the mold before the silicon mixture is poured into the mold. Please click here to view a larger version of this figure.
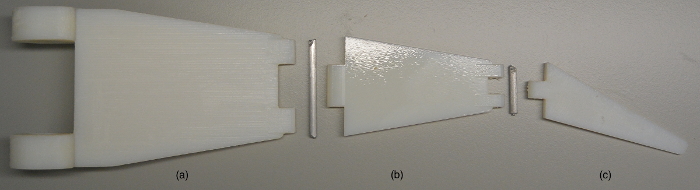
Figure 4: Skeleton. The flexible robotic flipper is supported by a skeleton printed in three pieces: the base (a), the middle (b) and the tip (c). The base and middle, and the middle and tip, are connected by dowels through knuckles at their joints. This allows for flexibility about those locations of the completed flipper. Please click here to view a larger version of this figure.
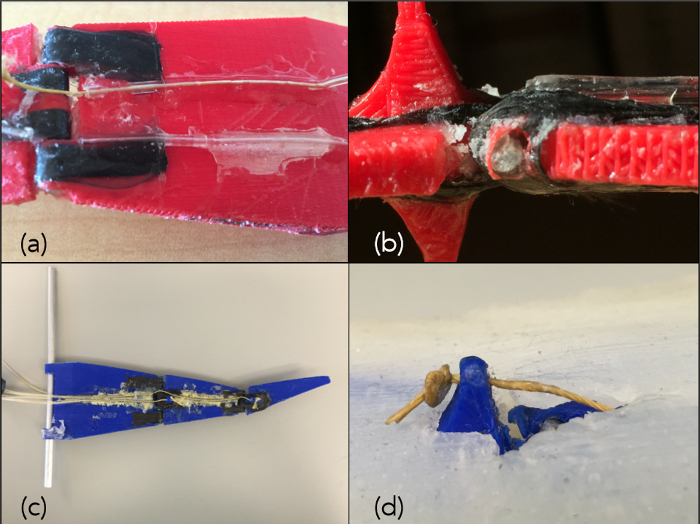
Figure 5: Skeleton Assembly. After printing, the skeleton parts, the knuckles are reinforced with carbon threads (a), they are connected at the knuckles with axels (b), guide-tubes are affixed to the base and middle pieces (c) and Kevlar threads are connected to the towers (d). Please click here to view a larger version of this figure.
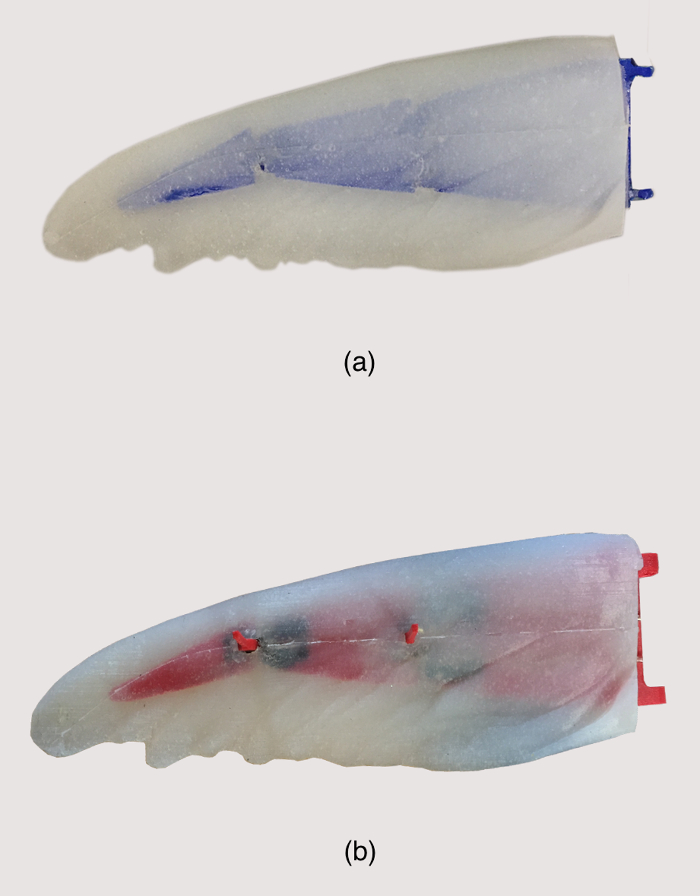
Figure 6: Robotic Flipper. The robotic flipper is made of flexible silicone (white) with an imbedded plastic supporting structure (blue). The shaft at the base rotates, emulating the rotation at the elbow and shoulder of the animal. The robotic flipper can be passive (a), where it is only actuated at the root and the resulting motion is based of fluid-structure interactions, or active (b) where Kevlar wires connect to the knuckles provide the necessary changes in camber. Please click here to view a larger version of this figure.
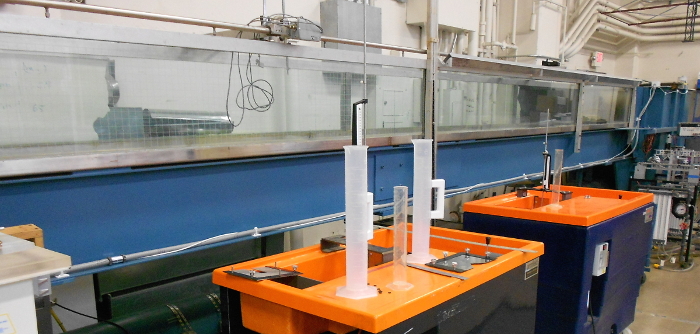
Figure 7: Flume. Flow experiments are conducted in the recirculating water flume at the George Washington University. The flume has a working section of 0.60 (width) by 0.40 (depth) meters, is 10 meters long, and can run at flow velocities of up to 1 m/s. Flow is from right to left, in the figure. The robotic flipper is mounted using the assembly shown in Figure 8 to the rails at the top of the test section. Please click here to view a larger version of this figure.
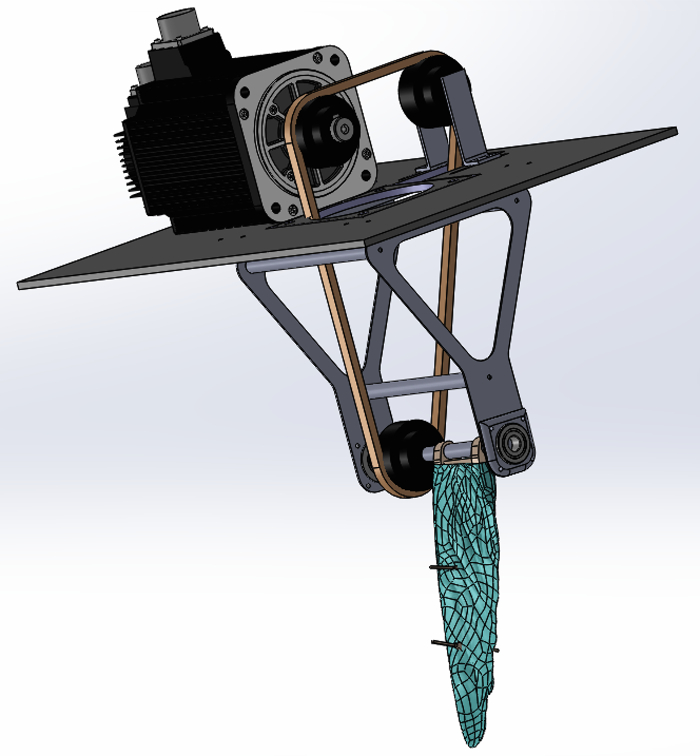
Figure 8: Assembly. The robotic flipper is mounted to a recirculating flume with a custom mounting. The mounting holds a servomotor that is connected to the main axis of the robotic flipper (located at the root of the robotic flipper) through a belt and three pulleys. Please click here to view a larger version of this figure.
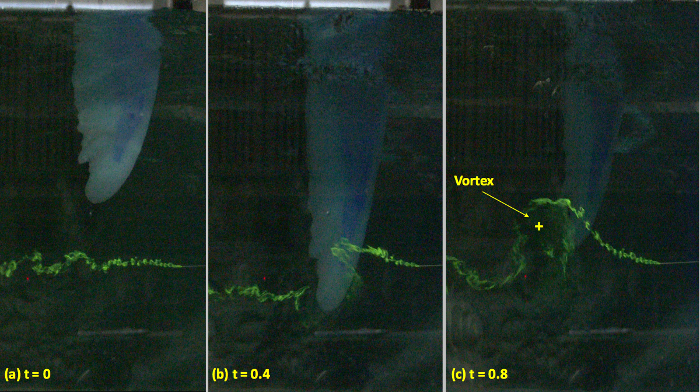
Figure 9: Dye visualization. Fluorescent dye is injected through a tube upstream of the flapping flipper. Three instances of time are shown: (a) the beginning of the cycle t= 0, (b) 40% of the way through the cycle t= 0.4, and (c) after 80% of the cycle t= 0.8. In the right panel (c), we can see a vortex that has formed around the tip of the flapping robotic flipper. Please click here to view a larger version of this figure.
