1. Survey Design
- Find one or more off-shore commercial scallop vessels available for 6 – 8-day intervals.
- Construct a steel pyramid with an interior frame where three cameras, lights, and a junction box for a fiber optic cable can be mounted (Figure 1). Ensure that one camera is a high resolution digital still camera and two are lower resolution, but still high definition, video cameras.
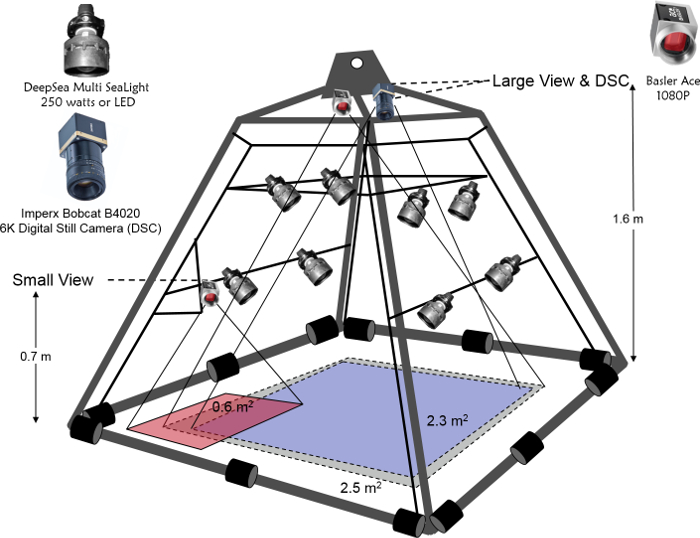
Figure 1: Drop camera survey pyramid with cameras and lights used for data collection in 2017. The University of Massachusetts Dartmouth, School for Marine Science and Technology drop camera survey pyramid with cameras and lights used for data collection in 2017. A junction box that connects camera and light cables to a fiber optic cable is mounted between the two bars with lights and is not shown. Please click here to view a larger version of this figure.
- Use a systematic sampling design to place survey stations 5.6 km apart in most areas of Georges Bank utilized by the fishery and 2.8 km apart in two areas of importance1
NOTE: Two scientists, a captain, and a mate were able to survey about 50 stations every 24 hours on the 5.6 km grid and 80 stations on the 2.8 km grid. Therefore, approximately 5 survey trips were needed to complete the survey.
2. Data Collection
- Load equipment onto the vessel.
- Set up equipment on the vessel deck.
- Arrange pyramid, a pressure sensitive winch with fiber optic cable on a drum and attached to slip ring, and davit on to the deck of the vessel. Ensure that the fiber optic cable can run from the winch through the davit and to the pyramid without touching the vessel's winch cable.
- Use small, temporary welds to affix winch, davit, and davit plate into place.
- Wire pressure sensitive winch power cable into the vessel's fuse box.
- Attach junction box to pyramid.
- Attach cameras and lights to the pyramid.
- Connect cameras and lights to the junction box with camera and light cables.
- Run fiber optic cable through sheave and attach to davit.
- Attach vessel hydraulic winch cable to pyramid.
- Set up equipment in vessel wheelhouse.
- Plug in and secure desktop computer.
- Connect 2 monitors to the desktop computer. Secure one monitor near the computer and the second near the controls for the vessel's hydraulic winch.
- Connect a global positioning system (GPS) device to the desktop computer via a USB port.
- Plug in and secure a laptop computer with a mobile field mapping program near the vessel helm. Load the station locations into the computer prior to departure.
- Connect a GPS device to laptop computer via a serial port.
- Connect cameras and lights to the vessel wheelhouse.
- Attach the "deck end" of the wheelhouse run of fiber optic cable to optical slip ring on the pressure sensitive winch.
- Attach the "wheelhouse end" of wheelhouse run of fiber optical cable to the fiber optic interface on the desktop computer and the light power plug.
- Launch the field data collection program from the desktop computer. Ensure that all cameras mounted on the pyramid and plugged into the junction box automatically show as connected.
NOTE: If all cameras do not show as connected, reset camera connections within the program or troubleshoot by swapping components (camera, connecting cables, slip ring, etc.) in a systematic manner.
- Capture images and record data at each station.
- Launch the mobile field mapping program from the laptop computer.
- Select the "mark" tool and drag the target icon onto a station to provide a bearing to the station.
- Slowly lower the sampling pyramid to the seafloor using vessel's hydraulic winch when the station has been reached and the vessel has been stopped.
NOTE: This is done by the vessel's crew and the pressure sensitive winch must be turned on prior to lowering the sampling pyramid. - Launch the field data collection program from the desktop computer while the pyramid is being lowered to the seafloor.
- Double click "Area Short Name" box and enter a name for the area.
NOTE: This only needs to be done for the first station of an area. - Click the "Launch Captains Cam" button to display the camera views and other information on the monitor near the hydraulic winch controls.
- Double click "Area Short Name" box and enter a name for the area.
- Switch on power to lights.
- Capture quadrat data once the sampling pyramid has landed on the seafloor.
- In the field data collection program, click "Start Station" to start the recording of video.
NOTE: The button will blink red while the video is recording. - Click "Take Snapshots" when a clear view of the seafloor appears, then click "Save All" to capture a still image from all camera views simultaneously.
- Click the "Write to Database" button.
NOTE: This will bring up a new dialogue box with depth, location, temperature, station number, quadrat number, area name, and a unique identification number automatically entered by the software. - Enter the number of scallops seen in the digital still camera image in the "Scallop Count" box and type any comments into the "Comments" box.
- Click the "Submit Data" button to write the data about the quadrat as a row into the field database.
- In the field data collection program, click "Start Station" to start the recording of video.
- Lift the pyramid, until the seafloor can no longer be seen.
- Slowly lower the pyramid to the seafloor and repeat steps 2.4.6 and 2.4.7. until data for four quadrats has been captured. Ensure that the pyramid has drifted so that different quadrat images of the seafloor are captured.
- Raise the sampling pyramid from the seafloor to a secure position next to the vessel.
- End the station while the pyramid is being raised.
- Click "End Station" in the field data collection program to end the video recording and advance program to the next station.
- Click the "Quit Program" button to close the program.
- Turn off power to lights.
- Click "Capture Station" in the mobile field mapping program to mark the station as completed then repeat step 2.4.2.
- Repeat previous steps of section 2.4. until all survey stations have been completed.
- Conduct a camera calibration drop.
- Measure the length of at least 30 grid cells of a wire grid with electronic calipers. Mark the cells that are measured.
- Attach the grid to the base of sampling pyramid using twine or rope. Ensure that the measured grid cells are in the camera views.
- Repeat steps 2.4.3 to 2.4.6.2 to capture images of the grid.
NOTE: This calibration is usually done before the first station but can be done prior to departure in a test tank or at any time during the survey. The purpose is to determine the length in mm to pixel ratio for confirming quadrat size and measuring features within the images.
- Quantify data within digital still camera quadrat images.
NOTE: Use images from the other cameras and the video as aids in this process.- Launch the lab data collection program and select the "Digitize" profile.
- From the dropdown menu, select the year, area, camera, station, and quadrat of interest.
- Click "go" to bring an image based on the criteria selected in step 2.6.2. into the program.
- In the "Substrate" section, click the boxes for the substrate types that are present. See14 for a detailed description of substrate types and how they are classified.
- Quantify macrobenthic animals.
NOTE: 50 taxa of macrobenthos are counted or noted as present or absent. A complete list of these taxa and how they are tracked can be found in reference13.- Click the boxes for the animals that are present in the "Inverts" presence section.
- Enter the number of each animal observed in the "Inverts" count section.
- Click the red "SC" button and dot each scallop in the image.
- Click the green "SF" button and dot each sea star in the image.
- Click the black "CL" button and dot each clapper (scallop that has died, but both sides of the shell are still attached to hinge) in the image.
- Click the blue "FI" button and dot each fish in the image.
- In the "Fish" count section, enter the number of each fish type observed.
NOTE: For the other dotted animals the program automatically counts the number of dots and assigns the counts to the appropriate category. For fish, dots are automatically counted, but the user must identify which type of fish and how many. The total number of fish dots counted by the program must match the number of each fish type entered by the user.
- Click the "submit" button to write the data about the image as a row into the lab database and create a copy of the image with the animals dotted.
- Perform a quality control of steps 2.6.4. and 2.6.5.
- Change the profile in the lab data collection program to "ImageCheck."
NOTE: This should be done by a different person from the one that completed steps 2.6.4 and 2.6.5 for the image. - Repeat steps 2.6.2 and 2.6.3. to load the original image, dotted image, and fill in substrate and animal data entered by the "Digitize" user profile.
- Review entry for accuracy and make any changes necessary.
- Select the "submit" button to overwrite the data about the image submitted by the "Digitize" user and mark the image as quality controlled in the lab database.
- Change the profile in the lab data collection program to "ImageCheck."
- Measure scallops observed in images.
NOTE: Scallops partially visible (obscured by growths, partly in image, etc.) or off the sea floor should not be measured.- Launch the image annotator program.
- Select "File" and then "Load Image Directory" from the drop-down menu. Navigate to the dotted image of interest and load the image into the program.
- Select the "line annotation" and draw a line from the umbo of scallop to the top of scallop shell.
- Repeat step 2.6.8.3. for all measurable scallops in the image.
- Select "File" and then "Save Annotations" to create a spread sheet of measurements.
- Convert measurements from pixels to millimeters by using the average pixels to millimeters ratio from 2.5.
3. Data Products
- Calculate spatially specific estimates of scallop density and size.
- Plot survey stations using mapping software.
- Partition survey stations by Scallop Area Management Simulator (SAMS) model zones.
NOTE: In the U.S. Atlantic sea scallop fishery, the SAMS model is used to project sea scallop abundance and landings8. All of the following steps are done for each SAMS zone. - Average scallop measurements to obtain the average shell height of scallops.
- Calculate mean densities and standard errors of scallops.
- Increase the quadrat size by the average shell height of scallops in the SAMS zone to adjust for partially visible scallops counted along the edge of the image19.
- Calculate density using the adjusted quadrat size and equations for a 2-stage sampling design to account for multiple quadrats being sampled at each station20:
(1)
(2)
where n = primary sample units (stations), m = elements per primary sample unit (quadrats), = measured value (counts of scallops) for element j in primary unit i,
= measured value (counts of scallops) for element j in primary unit i,  = sample mean per element (quadrat) in primary unit i (stations), and
= sample mean per element (quadrat) in primary unit i (stations), and  = the mean over the two-stages. The standard error of this mean is:
= the mean over the two-stages. The standard error of this mean is:
(3)
where is the variance among primary unit (stations) means.
is the variance among primary unit (stations) means.
- Calculate total and exploitable biomass.
- Multiply scallop density by the total area surveyed to estimate the number of scallops in the area.
- Create a shell height frequency distribution of scallop measurements with 5 mm size bins.
- Multiply 3.2.1. by the frequency of scallops in each size bin from 3.2.2. to get the number of scallops in each size bin in the area.
- Multiply the estimated meat weight of scallops at the mid-point of each 5 mm size bin by the number of scallops in each size bin. Use the shell height to meat weight regressions specified by the New England Fisheries Management Council's Scallop Plan Development Team to estimate the scallop weight at the size in grams21.
- Sum the meat weight of scallops from 3.2.4. to produce an estimate of total scallop biomass. Convert scallop biomass from grams to metric tons.
- Divide the sum of scallop meat weights from 3.2.5. by the total number of scallops from 3.2.1. to get the average weight of one scallop.
- Multiply the number of scallops at each size bin from 3.2.3. by a commercial scallop dredge selectivity equation to estimate the number of exploitable scallops22.
- Repeat steps 3.2.5. and 3.2.6. with the counts of exploitable scallops from 3.2.7. to estimate the biomass of scallops of exploitable size and their average meat weight.
- Create scallop distribution maps.
- Divide the sum of scallop counts, scallops with shell heights less than 75 mm, and scallops with shell heights over 100 mm at each survey station by the total area viewed in the digital still camera (9.2 m2) at each station to respectively calculate overall scallop, juvenile scallop, and exploitable scallop density at each station.
- Plot each density for each station to map the spatial distribution of overall, juvenile, and exploitable scallop abundance, respectively.
Survey stations were sampled as part of five research trips conducted from late April to mid-July (Figure 2). Due to visibility and weather issues, a swath of stations in SAMS zone CL2-S-EXT were not sampled and some stations in other zones were also dropped during quality assurance checks. For all other stations, four high quality digital still images were captured (Figure 3). For all images in these stations, substrate and macrobenthic animals were quantified and scallops were measured. Scallop counts and measurements were partitioned by SAMS zone allowing for abundance, distribution and biomass estimates, along with audited raw data of scallop counts and measurements, to be provided to the Northeast Fisheries Science Center and New England Fisheries Management Council by August 1 for inclusion into the annual scallop allocation process (Tables 1 and 2). Scallop distribution maps were created for all scallops, juvenile scallops (shell heights less than 75 mm), and scallops of exploitable size (shell heights greater than 100 mm) (Figure 4).
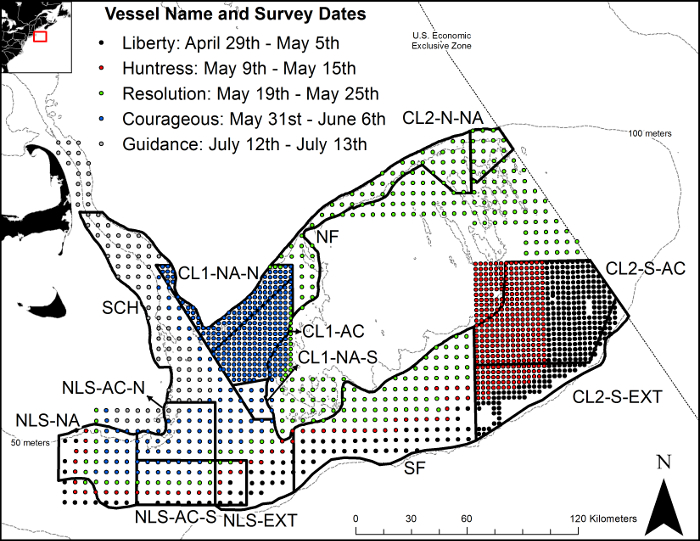
Figure 2: Drop camera stations on Georges Bank in 2017. Stations are displayed by the vessel with survey dates and stratified with areas of high interest sampled with stations 2.8 km apart and all other areas sampled with stations 5.6 km apart. Black lines and labels identify Scallop Area Management Simulator model zones used to project sea scallop abundance and landings. Please click here to view a larger version of this figure.
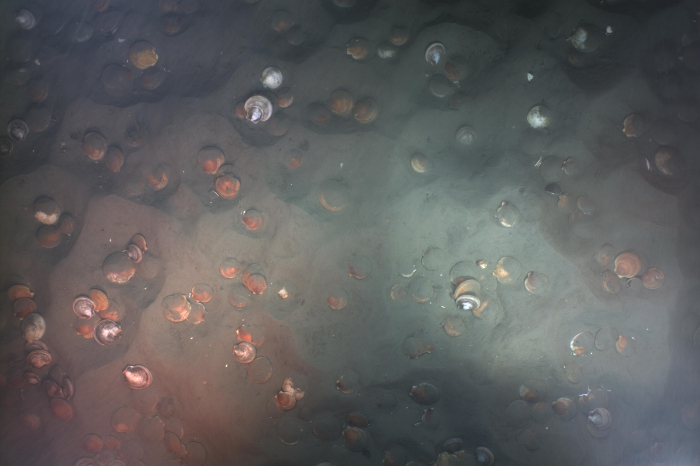
Figure 3: Example digital still image from the 2017 drop camera survey on Georges Bank. For the entire Georges Bank survey, substrate and macrobenthic animals were quantified and scallops were measured in 5,216 images of similar quality. All images can be viewed at <http://bit.ly/scallopsurvey>. Please click here to view a larger version of this figure.
| Area | Quad | Stations | Measured | SH | Sc. Per m2 | SE | Scallops |
| CL1-NA-N | 2.6 | 101 | 858 | 105 | 0.98 | 0.29 | 761 |
| CL1-AC | 2.6 | 155 | 81 | 106 | 0.06 | 0.01 | 66 |
| CL1-NA-S | — | 7 | 0 | — | <0.02 | — | — |
| CL2-N-NA | 2.6 | 16 | 58 | 87 | 0.43 | 0.2 | 214 |
| CL2-S-AC | 2.6 | 435 | 556 | 93.6 | 0.14 | 0.01 | 465 |
| CL2-S-EXT | 2.5 | 147 | 660 | 77.6 | 0.48 | 0.04 | 545 |
| NF | 2.6 | 54 | 13 | 88 | 0.02 | 0.01 | 39 |
| NLS-AC-N | 2.7 | 31 | 72 | 120 | 0.27 | 0.1 | 260 |
| NLS-AC-S | 2.5 | 39 | 2,718 | 72.7 | 9.7 | 3.09 | 11,676 |
| NLS-EXT | 2.6 | 14 | 170 | 95.1 | 2.24 | 2.16 | 966 |
| NLS-NA | 2.6 | 42 | 696 | 99.1 | 2 | 0.83 | 2,597 |
| SCH | 2.5 | 137 | 138 | 71.3 | 0.15 | 0.03 | 631 |
| SF | 2.5 | 126 | 219 | 74.4 | 0.19 | 0.03 | 747 |
Table 1: Digital still camera data from the 2017 drop camera survey of Georges Bank. Results are presented by Scallop Area Management Simulator model zones. Included in the table is the adjusted quadrat area (Quad), the number of stations sampled (Stations), the number of scallop shell heights measured (Measured), the mean shell height of scallops observed in mm (SH), the mean number of scallops per m2 (Sc. Per m2) with associated standard error (SE), and an estimate of the number of scallops in millions (Scallops). Results for CL1-NA-S could not be produced because no scallops were observed.
| Estimation of Total Biomass | Estimation of Exploitable Biomass | |||||
| Area | MW | MT | SE | MW | MT | SE |
| CL1-NA-N | 18.28 | 13,900 | 4,100 | 23.85 | 9,900 | 2,950 |
| CL1-AC | 24.87 | 1,650 | 350 | 33.72 | 1,350 | 300 |
| CL1-NA-S | — | — | — | — | — | — |
| CL2-N-NA | 14.89 | 3,200 | 1,500 | 26.51 | 2,100 | 980 |
| CL2-S-AC | 15.84 | 7,360 | 685 | 23.47 | 4,600 | 425 |
| CL2-S-EXT | 9.46 | 5,150 | 440 | 17.1 | 1,900 | 165 |
| NF | 16.26 | 600 | 260 | 27.59 | 500 | 200 |
| NLS-AC-N | 34.15 | 8,900 | 3,390 | 38.02 | 7,800 | 2,990 |
| NLS-AC-S | 8.49 | 99,100 | 31,590 | 16.88 | 24,600 | 7,830 |
| NLS-EXT | 16.73 | 16,200 | 15,590 | 19.54 | 7,600 | 7,310 |
| NLS-NA | 20.4 | 53,000 | 22,100 | 25.13 | 30,700 | 12,800 |
| SCH | 10.45 | 6,600 | 1,260 | 24.65 | 3,300 | 620 |
| SF | 9.1 | 6,800 | 1,080 | 17.33 | 2,400 | 380 |
Table 2: Estimates of total and exploitable biomass for the 2017 Georges Bank drop camera survey. Results are presented by Scallop Area Management Simulator model areas. Included in the table are the mean scallop meat weight in g (MW), the total weight of scallops in metric tons (MT) and the standard error in metric tons. Results for CL1-NA-S could not be produced because no scallops were observed.
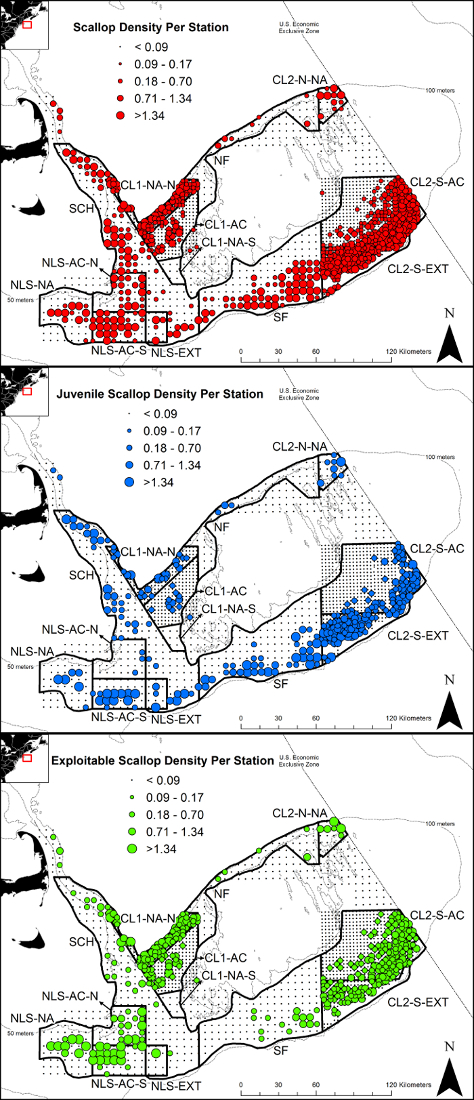
Figure 4: Scallop distribution and abundance on Georges Bank during 2017. Scallop distribution and abundance on Georges Bank during 2017 for all scallops (top), scallops less than 75 mm shell height (middle), and scallops greater than 100 mm shell height (bottom) from a drop camera survey. Please click here to view a larger version of this figure.
