Haloperidol procedure
We developed this gait analysis system to compare gait parameters in control rats to those in experimental rats expected to show a variety of locomotor, gait, and balance impairments. We used a within-subject design in which every rat was tested in the saline, high dose haloperidol and low dose haloperidol conditions. Rats were separated into two groups (A and B) to allow counterbalancing; gait testing was counterbalanced for time of day and order of condition. Each test was separated by 48 h. Rats were lightly anesthetized with isoflurane before receiving intraperitoneal (IP) injections of either saline or haloperidol. Gait was tested 1 h post-injection, at which point the haloperidol should be at peak levels15,16,17.
Behavioral results
We observed prominent behavior changes in animals treated with haloperidol. In the high dose condition, five of the eight rats had periods of immobility at the start of the walkway, during which they were unresponsive to the experimenter touching them and resistant to being moved. In some cases, this state persisted for several minutes until the rat was removed from the walkway. In other cases, the immobile rat would suddenly move rapidly or “bound” across the walkway and then return to the immobile state near the end. In the low dose condition, 3 of the 8 rats had similar periods of immobility. At this dosage, there was only one instance of bounding behavior. No bounding was observed when the animals were treated with saline.
We analyzed the effects of haloperidol on the following gait parameters: base of support, stride length, stride speed, stance duration, stance to swing ratio, maximum contact area, and interlimb distance. Because many gait parameters for front and hind limbs are identical and haloperidol generally has uniform impacts on all limbs, we calculated parameters for only the hind limbs and did not separate data for left and right limbs. For each rat, we calculated the mean of each gait parameter from all usable runs from each testing day. All parameters (other than speed variability) were calculated as the mean for the first 4 usable steps of a run. To assess whether each dosage of haloperidol significantly impacted gait, we used a paired sample t-test. In Experiment 1, there was a significant increase in stride length (Figure 6A; t(7) = -2.962, p = 0.021) and maximum contact area (Figure 6A; t(7) = -2.51, p = 0.04) in animals treated with high dose haloperidol. Base of support, speed, stance duration and stance to swing ratio were not significant. In Experiment 2, animals given low dose haloperidol showed a significant increase in stance duration (Figure 6B; t(7) = -2.444, p = 0.044) and maximum contact area (Figure 6B; t(7) = -3.085, p = 0.018) compared to the saline condition. No other gait parameters were significant. Additionally, there was a significant difference between the high dose and low dose haloperidol conditions in base of support (Figure 6C; t(7) =2.651, p = 0.033), maximum contact area (Figure 6C; t(7) = 4.635, p = 0.002) and interlimb distance (Figure 6C; t(7) = 3.098, p = 0.017).
Your location accuracy and errors in the automated system
To assess the accuracy of PrAnCER, we compared its automated analysis to the manual scoring of 21 randomly selected videos from a separate group of 6 control rats. For hand scoring purposes, the videos were converted into a sequence of images, which were then used to manually mark the locations of prints. For efficiency, we focused our analysis on spatial data measured from hind prints only. We extracted the mean stride length and BOS for each video and compared it to the automated values. While mean stride length was not significantly different between manual scoring and PrAnCER analysis (Figure 7B; t(20) = -0.01, p = 0.99), base of support was significant (Figure 7A; t(20) = -2.21, p = 0.038). Though the automated and manual scoring was generally well correlated, the automated system reported a 5% larger BOS on average. This difference may be due to variances in centroid selection rather than detection errors. For manual scoring, the print location was marked drawing an oval around the base of each hind print, as it would be difficult to manually replicate PrAnCER’s method of center of mass estimation. The clear trend was for PrAnCER to overestimate BOS, perhaps because some animals may splay their toes out in an asymmetric fashion, causing PrAnCER to observe more extreme centroids than manual scoring. Other systems have also noted significant increases in BOS between manual and automated scoring despite consistent stride length measures17. Considering the small differences observed and the consistency with other systems, we conclude that PrAnCER is a reliable measure of gait parameters.
It is important to note that all accuracy analysis occurred after manual correction of the automated output was performed using PrAnCER’s GUI. As in existing commercial systems, this step is necessary both for correcting errors in scoring and for eliminating runs that do not meet criteria22. We tuned PrAnCER to err on the side of false positives, as these are easier to correct post-hoc. We have never observed PrAnCER fail to detect a real print during manual correction of over 5 hundred videos. Other types of errors, however, were observed. These fell into 3 categories: false detections (detection of a non-print as a print), misclassifications (print mislabeled as front/hind or left/right), and false combinations (two prints incorrectly merged). These errors are easily corrected in the accompanying GUI, and typically occur in only a small percentage of videos filmed under normal conditions. Even with such corrections, PrAnCER markedly decreases the amount of manual labor involved in gait analysis. We estimate that for each video it takes approximately 3 min to run PrAnCER and correct any output errors (if necessary), while it would take nearly 10 min to manually score and analyze the same video.
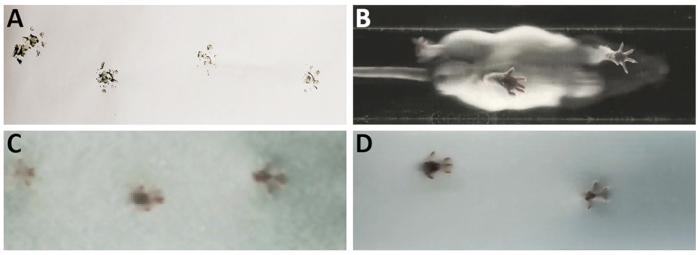
Figure 1. Comparison of gait analysis methods. (A) The traditional ink and paper method produces imprecise prints of paw shape and location. (B) Video recording with a transparent floor gives a detailed view of the paw prints but contains many salient features from the rat’s body that complicates automated scoring. (C) Lightweight paper over a clear floor creates a noisy image and loses details. (D) The use of vellum to create a translucent floor produces highly detailed prints while visually eliminating the body. Please click here to view a larger version of this figure.
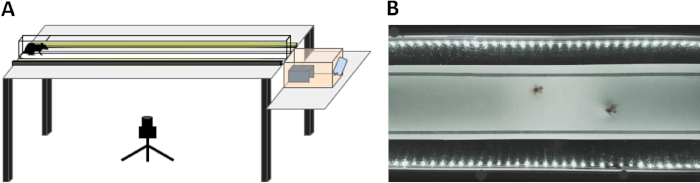
Figure 2. Schematic illustration of the gait walkway apparatus and video recording. (A) The rat walks through a clear walkway with a translucent floor to the home cage goal box while being recorded from below. In this case, the vellum covers a transparent floor to make it translucent. The walkway is illuminated by LED strips placed along its length at a level between the animal’s feet and body. (B) A screenshot of a video recording demonstrating the effects of the translucent floor. Two paws are clearly visible, but the rat’s body is essentially undetectable. Please click here to view a larger version of this figure.

Figure 3. Detection process for one frame of a paw print. (A) The original image is de-noised and then subjected to background subtraction (B). (C) An edge detection algorithm is applied and the results are converted to a series of X, Y coordinates called contours (D). (E) Contours are grouped by proximity and the convex hull (bounding box) of the group is taken to produce a single contour encompassing the print. Please click here to view a larger version of this figure.
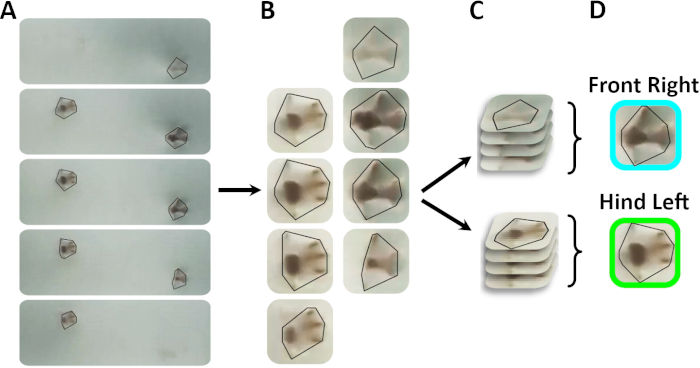
Figure 4. Conversion of individual detections into a classified print. (A) Paw prints are first identified in a set of frames. (B) Individual object detections are given a number that identifies them as a print, representing a single placement of one paw (C). (D) Finally, they are classified as left or right based on their location relative to the midline of the animal’s path, and front or hind based on their location relative to the previous paw prints. Please click here to view a larger version of this figure.
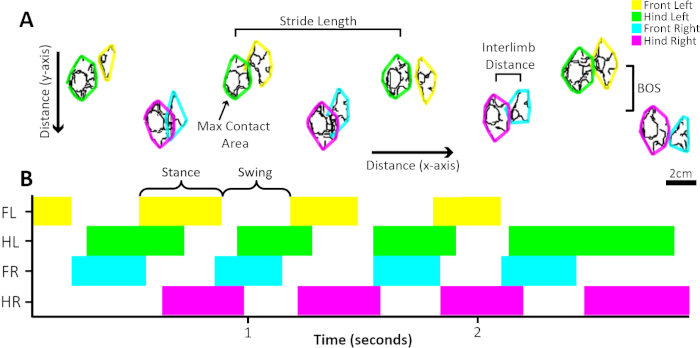
Figure 5. Illustration of gait parameters analyzed. (A) An example output showing the identification and location of paw prints. Original detected edges are shown in black. Final detected paws and approximate area are shown in colors that indicate paw classification. In this figure, yellow: front left, green: hind left, cyan: front right, and magenta: hind right. However, the colors can be changed in the Python script according to user preference. (B) A plot illustrating two major temporal parameters: the amount of time each paw is in contact with the ground (stance phase) and in the air (swing phase). Colored blocks indicate the stance phase and the white spaces indicate the swing phase. Please click here to view a larger version of this figure.
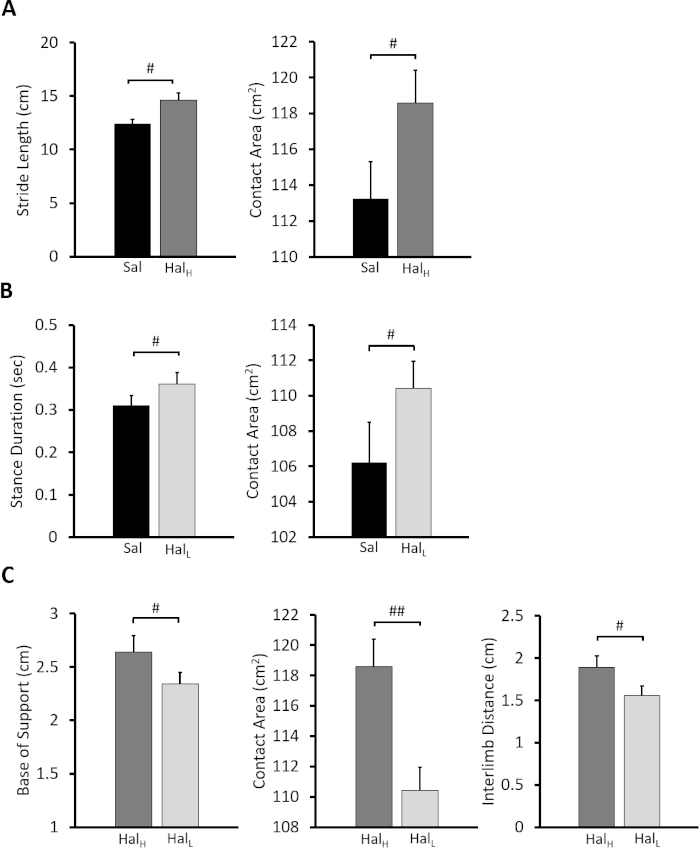
Figure 6. Effects of haloperidol on gait. (A) Results of Experiment 1: high dose haloperidol (HalH) significantly increased stride length and maximum contact area compared to the saline condition (Sal). (B) Experiment 2 resulted in more typical parkinsonian symptoms; low dose haloperidol (HalL) significantly increased stance duration and maximum contact area. (C) When comparing the haloperidol treated conditions from both experiments, high dose haloperidol increased base of support, maximum contact area and interlimb distance compared to the low dose condition. Data are means ± SEM, n =8. Paired samples t-test differences were as follows: # p < 0.05, ## p < 0.01. Please click here to view a larger version of this figure.
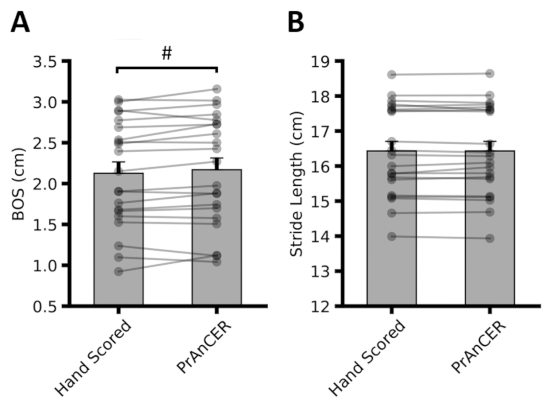
Figure 7. Accuracy of automated analysis. (A) The automated system significantly differs from manual scoring when measuring BOS, though this may be due to variations in manual centroid selection rather than detection errors. (B) The automated system is not significantly different from manual scoring for stride length. These accuracy results are consistent with those from other available systems. Data are means ± SEM, n = 21. Paired samples t-test differences were as follows: # p < 0.05. Please click here to view a larger version of this figure.
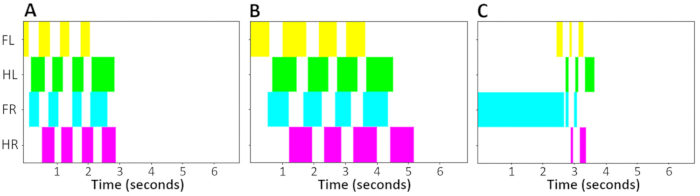
Figure 8. Comparison of temporal parameters. Temporal gait patterns for an animal treated with saline (A) and low dose haloperidol (B). (C) An illustration of the bracing-escape response from a rat given high dose haloperidol. As in Figure 5, colored blocks indicate when the paw was in contact with the ground (stance phase) and the white spaces indicate when the paw was in the air (swing phase). Abbreviations: FL, front left; HL, hind left; FR, front right; HR, hind right. Please click here to view a larger version of this figure.
| Experiment 1 | Experiment 2 | |||||||
| Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Test 6 | Test 7 | Test 8 | |
| Group A | HalH | Sal | HalH | Sal | Sal | HalL | Sal | HalL |
| Group B | Sal | HalH | Sal | HalH | HalL | Sal | HalL | Sal |
Table 1. Experimental design. This table illustrates the experimental design used in this study. We used a within-subject design in which every rat was tested in the high dose haloperidol (HalH), low dose haloperidol (HalL) and saline (Sal) conditions. Rats were divided into two groups; testing was counterbalanced for time of day and order of condition.
| Parameter | Definition |
| Stride Length | Distance between successive contacts of the same paw |
| Step Length | Distance between successive contacts of contralateral front or hind paws along the axis of the direction of motion |
| Base of Support (BOS) | Distance between successive contralateral front or hind paws perpendicular to axis of the direction of motion |
| Maximum Contact Area | The maximum detected area of a hind print |
| Interlimb distance | Distance between ipsilateral front and hind paws |
| Stance Duration | The length of time a paw was in contact with the ground |
| Swing Duration | The length of time a paw was not on the ground |
| Stance to Swing Ratio (SSR) | Stance duration/swing duration |
| Discrete Speed | Stride length/(stance duration + swing duration) for a paw |
| Average Speed | Average of discrete speeds in the period used in analysis |
| Speed Variability | Percent change in discrete speeds during a run |
| Run Speed | Time to cross the tunnel/length of tunnel |
Table 2. Description of gait parameters. This table describes the most commonly used gait parameters; those used in this study are indicated in bold.
