1. Concrete sample image acquisition
- Transport concrete to the workplace, where it will be poured by the pump truck.
- To capture images, switch on the shooting equipment by moving the power key switch to the right and turning it to the ON position. Adjust the camera's mode knob to the green automatic mode, ensuring the camera lens is parallel to the concrete surface, and press the Shutter Key. Capture 20 image samples of non-vibrated concrete, saving them in .jpg format with an acquisition resolution of 1024 x 1024 pixels, as illustrated in Figure 1.
- Insert the vibrating part of the concrete vibration equipment (plug-in concrete vibrating rod) into the concrete. Connect the power supply, and then switch on the concrete vibration equipment by setting it to the ON position.
- When there is some collapse on the surface of the concrete (caused by the vibration discharging air inside the concrete, leading to the sinking of surface aggregates to fill the gaps, resulting in concrete collapse) and some cement slurry appears, keep the camera lens parallel to the concrete surface and press the Shutter Key. Collect 20 image samples of vibrating concrete, as shown in Figure 2.
- Continue operating the vibration equipment. When there is no obvious collapse on the concrete surface, no cement slurry appears, and no bubbles are generated, stop the vibration process, and capture 20 image samples of vibrated concrete, as shown in Figure 3.
2. Sample image gray binarization
- Utilize the imread() function of MATLAB software to read the .jpg file as the unit format data of 1024 pixels x 1024 pixels x 3 color channels, representing the red, green, and blue channel values of the image.
- Next, apply the MATLAB function rgb2gray to convert the image to grayscale, denoted by the format gray value = rgb2gray(jpg file name). Calculate the gray value of each pixel according to Equation (1), and save the gray value as the unit8 format data of 1024 x 1024.
GR(i,j) = 0.2989R(i,j) + 0.587G(i,j) + 0.114B(i,j) (1)
where, GR(i,j) is the gray value of the pixel point, R(i,j) is the red channel value of the pixel point, G(i,j) is the green channel value of the pixel point, and B(i,j) is the blue channel value of the pixel point. - Alter the binary value of the gray values greater than the pixel threshold θ to 1 and set the binary value of the gray values less than the θ pixel to 0.
- After obtaining the binarized gray results, save the outcome as 1024 x 1024 logical format data. In this case, θ represents the binarization threshold, and its values are 50, 100, 150, and 200 for different vibration state concrete sample images, as depicted in Figure 5, Figure 6, and Figure 7.
3. Calculation of directional gradient eigenvalue
- Calculate the horizontal and vertical binary gradient of each pixel in the image using the following equation28
Tp = R(x, y + 1) – R(x, y – 1), Th = R(x+1, y) – R(x-1, y)
where Th is the horizontal binarized gradient, Tp is the vertical binarized gradient, R is the binarized logical format data, x is the row number of the binarized matrix, and y is the column number of the binarized matrix. - Calculate the binary gradient direction and size of each point using the following equation29

where T is the binary gradient size, αT is the binary gradient direction, Th is the horizontal binary gradient, and Tp is the vertical binary gradient. - Determine the size of the image segmentation block, denoted as n, where the value of n is [ 1,9]. Set the segmentation line for each n pixel in the y direction along the x direction, effectively dividing the image into n x n square blocks based on the segmentation line's position. Any parts of the image that cannot form complete square blocks are then removed.
- Partition binary gradient direction αT (value of the binary gradient direction αT is [ 0°, 360°]) into m parts, resulting in m directional gradient statistical angle intervals. Proceed to calculate the gradient statistical value for each block's gradient statistical angle interval.
- Based on the binary gradient direction of each pixel in the block, classify the pixels into the appropriate gradient statistical angle interval of each direction.
- Sum the binary gradient of the pixels in the gradient statistical angle interval of each direction in the counterclockwise direction to obtain the gradient statistical value of that interval. The obtained results for gradient statistical angle interval directional gradient statistics are depicted in Figure 8, Figure 9, and Figure 10 for block sizes n equal to 8, 128, and 512, respectively .
4. Constructing directional gradient feature vector
- Divide samples into required calculation areas, where each calculation area consists of four adjacent blocks based on the block results obtained in step 3.3. For instance, considering 16 x 16 resolution pixels and a block size of 4 x 4, the image is divided into (16 / 4-1) x ( 16 / 4-1 ) = 9 calculation areas.
- Calculate the statistical value of the directional gradient within angle interval of the gradient statistics of each block in the calculation area. Subsequently, obtain the feature vector with the directional gradient statistics as the component.
- Combine the directional gradient feature vectors from each calculation area to obtain the image's directional gradient feature vector.
5. SVM training
- Randomly select 42 samples from the three vibration states to create the training group, leaving the remaining 18 samples as the test group.
- Utilize the fitcecoc function of MATLAB for SVM training; the format is
SVM = fitcecoc (trainingFeatures, Trainingeigenvalue)
where SVM is the support vector machine to be trained, trainingFeatures is the training group image directional gradient feature vector, and Trainingeigenvalue is the characteristic value of the vibration state of the training group. The characteristic values of the vibration state of the non-vibrated concrete, vibrating concrete, and vibrated concrete samples are 1, 2, and 3, respectively. - Save the trained SVM using the Save function in .mat format.
6. Verification of SVM recognition accuracy
- Using MATLAB's prediction function, input the test group sample image's directional gradient feature vector into the trained SVM to obtain the calculated value of the vibration state feature for each test sample. The format is as follows:
testgroupcalculateseigenvalues = predict (SVM, testFeature)
where testgroupcalculateseigenvalues is the calculated value of the vibration state feature, and SVM is the support vector machine trained in step 5. testFeature is the directional gradient feature vector of the test group sample image. - Determine the test set sample recognition results by feeding the test set into the trained SVM. Count the number of samples for which the test set recognition results match the actual state, and then calculate the recognition accuracy by dividing the number of correct samples by the total number of test set samples.
- If the test recognition accuracy is higher than 94%, consider the SVM recognition as effective. If it is lower than 94%, return to step 1.1 and adjust the binarization threshold, block size n, and the number of directional gradient statistical intervals m.
This protocol aims to analyze how the three-vector calculation parameters of the directional gradient feature affect the accuracy of the SVM in identifying the concrete vibration state. The primary calculation parameters of the directional gradient feature vector include the directional gradient statistical block size, the number of directional gradient statistical angle intervals, and the binary gray threshold. This section uses three main calculation parameters as variables to design the test. The test parameter levels are detailed in Table 1. A total of 100 tests were conducted on concrete image samples with a resolution of 1024 x 1024 pixels. The test results corresponding to the parameters described in Table 1 are presented in Table 2.
Analysis of different binary gray threshold-SVM recognition results
Table 2 displays the average recognition accuracy of the SVM for different binarization thresholds, and the relationship between the binarization threshold and recognition accuracy is visualized in Figure 4. When the block size and the number of statistical intervals are fixed, the recognition accuracy of the SVM generally exhibits a decreasing trend with an increase in the binarization threshold. Notably, the recognition accuracy decreases significantly when the binarization threshold falls within the range of 100 to 150. Further investigation is required to understand the reasons behind this phenomenon and its impact on the SVM's division calculation.
In this section, following the method described in step 2.1 and the experimental design described in step 3.1, the image samples of non-vibrated concrete, vibrating concrete, and vibrated concrete are binarized. The binarized gray thresholds used are 50, 100, 150, 200, and 250, resulting in binarized gray images for each state, as shown in Figure 5, Figure 6, and Figure 7.
As illustrated in Figure 5, as the binarization threshold decreases, the white area in the binary image of the non-vibrated concrete image sample reduces significantly. At a binarization threshold of 250, the binary image appears to be pure black. In Figure 6, the changing trend of the binary gray image of the vibrating concrete image sample with the binarization threshold is similar to that of the non-vibrated concrete sample, but the reduction of the white area is more pronounced in the vibrating concrete image sample. Moreover, Figure 7 illustrates the combination of the black part and white areas, reflecting the surface texture characteristics of concrete in different vibration states. The binary gray image of vibrated concrete also decreases with decreasing binarization threshold. For instance, when the binarization threshold is set to 50 and 100, the binary gray image of vibrated concrete tends to be white. At a threshold of 150, it appears similar to the other two states, but when the threshold exceeds 150, the binary image tends to be black. Notably, when the binarization threshold is between 100 and 150, significant changes in the binary image features occur.
The feature vector extraction in this paper relies on the directional gradient of image samples. Increasing the binarization threshold from 50 to 100 reduces the contact area between white and black pixels. This reduction impacts the statistics of the pixel directional gradient since it depends on the pixel value change between each pixel. A larger contact area results in fewer than 0 components in the SVM feature vector, making the representation of concrete vibration state characteristics more comprehensive. The change in recognition accuracy with the binarization threshold is primarily due to the alteration in the number of 0 components in the directional gradient feature vector. Furthermore, when the binarization threshold is raised from 150 to 250, the white area of the binary image sample is significantly reduced. Consequently, the corresponding recognition accuracy is also greatly diminished, further supporting this rule.
Different directional gradient statistical block size-SVM recognition results
In this section, the statistical block size identification accuracy of gradient statistics in different directions, as presented in Table 2, is calculated. Subsequently, the mean value of statistical block size identification accuracy of gradient statistics in each direction is calculated. The results are illustrated in Figure 8.
Figure 8 demonstrates the relationship between the recognition of the SVM for 1024-resolution concrete image samples and the statistical block size of the directional gradient. This relationship can be expressed by Equation (2).
y=0.09+0.144x-0.01x2 (2)
The image sample feature vector is calculated by the block-sweeping method20. Meanwhile, when the block is small, the feature vector characterizes the local specificity of the binary image. This results in concrete sample images of different vibration states having similar local specificity, leading to a significant number of 0 components in the feature vector. Consequently, this high number of 0 components causes substantial interference in the SVM division, leading to reduced recognition accuracy, particularly for 1024-pixel images with a block size is 8 pixels.
As the block size increases, the local specificity reflected by the feature vector gradually diminishes, and the feature vector characterizes the regional specificity of the image sample, as illustrated in Figure 10. Consequently, the number of 0 components in the feature vector reduces, leading to less interference during the division process of the SVM. Thereby, the recognition accuracy of the SVM improves.
However, when the block size is further increased, exceeding 32 pixels, the number of 0 components in the feature vector continues to decrease. But it also leads to a reduction in the dimension of the feature vector of the SVM training set. At this point, the impact on the recognition accuracy of the SVM mainly stems from the lack of feature dimensions. Nevertheless, the feature vector still manages to capture a certain degree of specificity in the concrete image. As illustrated in Figure 11, when the block size is expanded to a certain extent, the directional gradient features in each block of concrete image samples with different vibration states still exhibit significant differences. This observation explains why the recognition accuracy decreases when the block size becomes excessively large, although the decrease is relatively small.
Directional gradient statistical angle interval number-SVM recognition results
In this section, the recognition accuracy of the number of directional gradients statistical intervals presented in Table 2 is calculated. Subsequently, the average recognition accuracy of the number of directional gradients statistical intervals is computed. The results are illustrated in Figure 12.
From Figure 12, it is evident that as the number of directional gradient statistical intervals increases, the recognition accuracy of the SVM for the concrete vibration state initially rises and then decreases. This relationship can be expressed by Equation (3)
y=-0.45+0.2x-0.007x2 (3)
The influence mechanism between the number of statistical intervals of gradient direction and the recognition accuracy is due to the change in image feature extraction parameters. This causes a shift in the specific characterization ability of feature vectors for image samples. In this section, a part of the image samples of moderately vibrated concrete is intercepted. The calculation results of the directional gradient characteristics are obtained when the grid size is 4, and the number of directional gradient statistical intervals is set to 6, 9, 12, and 15, as illustrated in Figure 13.
As depicted in Figure 13A,B, when the number of directional gradient statistical intervals is set to 6, the size of each interval is 60°. Considering the calculation block size is 4×4, there are 16 pixels in each block. With larger interval sizes, the directional gradient of multiple pixels falls within a single interval. This leads to an increase in the number of 0 components in the feature vector of image samples when the interval size is larger. Consequently, it affects the training results and recognition accuracy of the SVM. However, when the number of directional gradients statistical intervals is 9, the angle division becomes more refined, leading to a reduction in situations where there are no pixels within an interval. Consequently, the number of 0 components in the feature vector of image samples is also reduced, resulting in an improved image-specific representation ability of the feature vector. However, upon comparison with Figure 13C and Figure 13D, when the number of directional gradient statistical intervals increases from 12 to 15, the number of pixels with 0 in the interval of the directional gradient feature calculation results increases. As a result, the feature vector's ability to characterize the specificity of the sample image decreases. This reduction in characterization ability is attributed to the further decrease in the size of the directional gradient statistical interval. Specifically, the interval with only one pixel is now divided into two intervals: one with a single pixel and another one as an empty interval. Consequently, the increase in the number of empty intervals leads to more 0 components in the feature vector, ultimately resulting in a decrease in recognition accuracy.
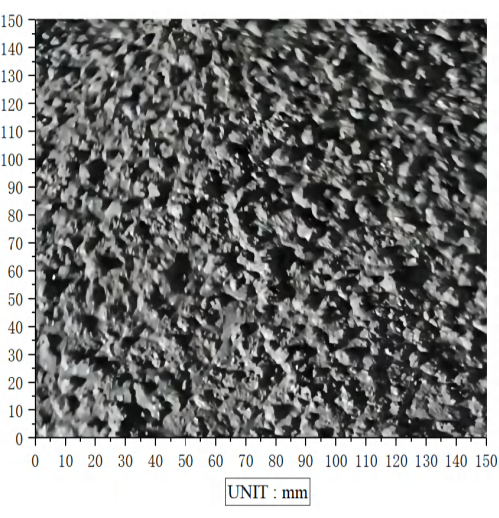
Figure 1: Image of non-vibrated concrete. Pumped concrete images taken without vibration operation. Please click here to view a larger version of this figure.
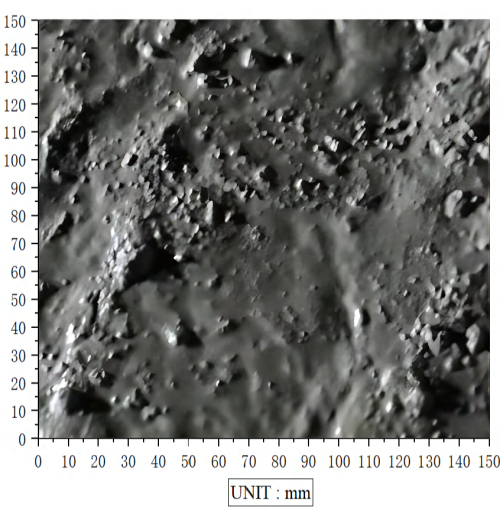
Figure 2: Image of vibrating concrete. Image samples in pumping concrete vibration operation. Please click here to view a larger version of this figure.
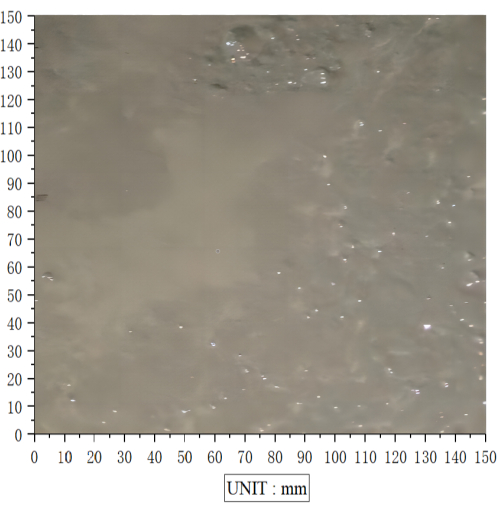
Figure 3: Image of vibrated concrete sample. Image samples when pumping concrete vibration operation is completed. Please click here to view a larger version of this figure.
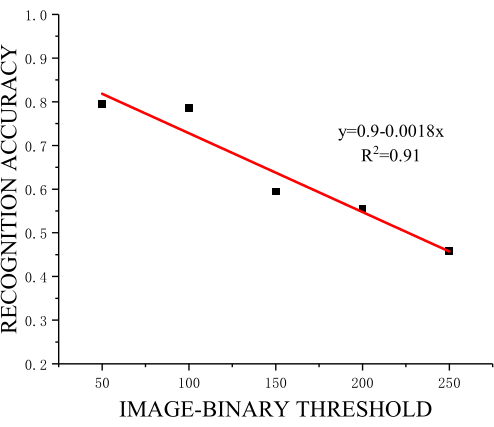
Figure 4: Binarization threshold-recognition accuracy relationship. The influence of binarization threshold on the recognition accuracy of SVM. Please click here to view a larger version of this figure.
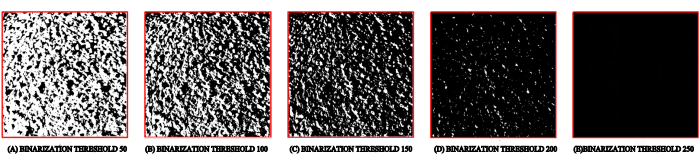
Figure 5: Binary grayscale image of non-vibrated concrete. The binarization processing results of non-vibrated concrete images when different binarization thresholds are set. (A) Binarization threshold at 50. (B) Binarization threshold at 100. (C) Binarization threshold at 150. (D) Binarization threshold at 200. (E) Binarization threshold at 250. Please click here to view a larger version of this figure.
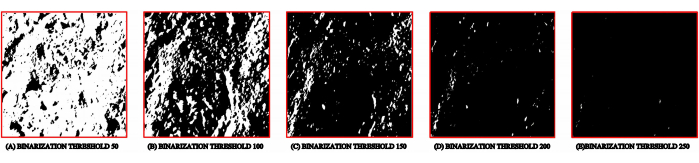
Figure 6: Binary gray-scale image of vibrating concrete. The binarization processing results of vibrating concrete images when different binarization thresholds are set. (A) Binarization threshold at 50. (B) Binarization threshold at 100. (C) The binarization threshold at 150. (D) Binarization threshold at 200. (E) Binarization threshold at 250. Please click here to view a larger version of this figure.
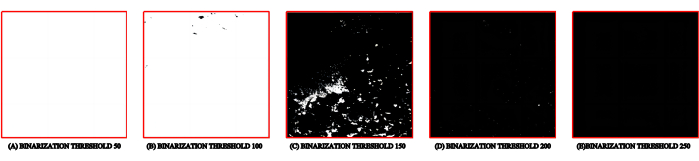
Figure 7: Binary grayscale image of vibrated concrete. The binarization processing results of vibrated concrete image when different binarization thresholds are set. (A) Binarization threshold at 50. (B) Binarization threshold at 100. (C) Binarization threshold at 150. (D) Binarization threshold at 200. (E) Binarization threshold at 250. Please click here to view a larger version of this figure.
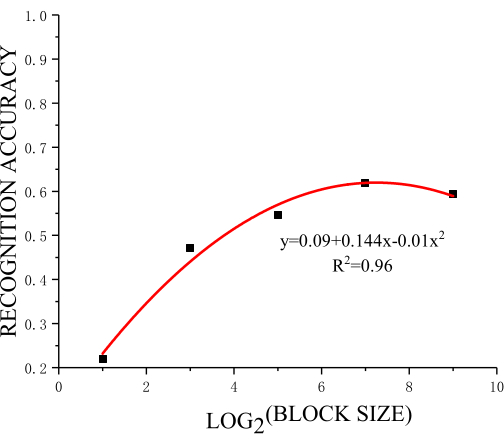
Figure 8: Directional gradient statistical block size-recognition accuracy diagram. The influence of directional gradient statistical block size on the recognition accuracy of SVM. Please click here to view a larger version of this figure.
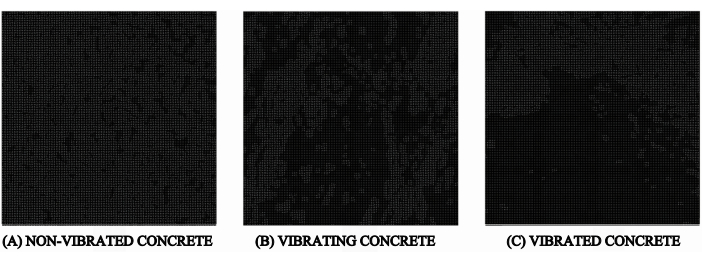
Figure 9: Schematic diagram of block size 8 pixels directional gradient feature extraction results. The gradient feature results in three kinds of vibration state direction when the block size is 8 pixels. (A) Non-vibrated concrete, (B) vibrating concrete, (C) vibrated concrete. Please click here to view a larger version of this figure.
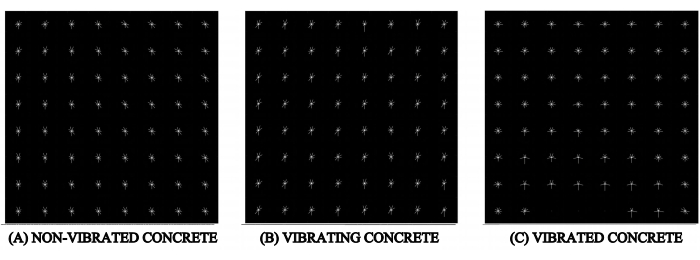
Figure 10: Schematic diagram of block size 128 pixels directional gradient feature extraction results. The gradient feature results in three kinds of vibration state direction when the block size is 128 pixels. (A) Non-vibrated concrete, (B) vibrating concrete, (C) vibrated concrete. Please click here to view a larger version of this figure.
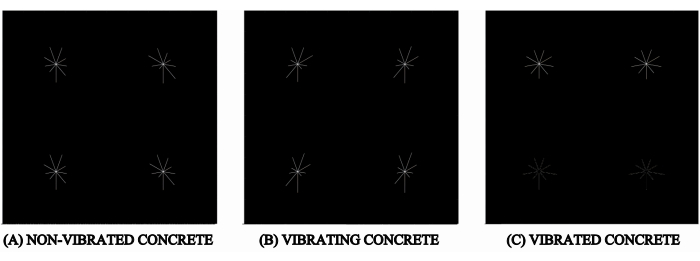
Figure 11: Directional gradient extraction results of concrete sample images in different vibration states with a block size of 512 pixels. The gradient feature results in three kinds of vibration state direction when the block size is 512 pixels. (A) Non-vibrated concrete, (B) vibrating concrete, (C) vibrated concrete. Please click here to view a larger version of this figure.
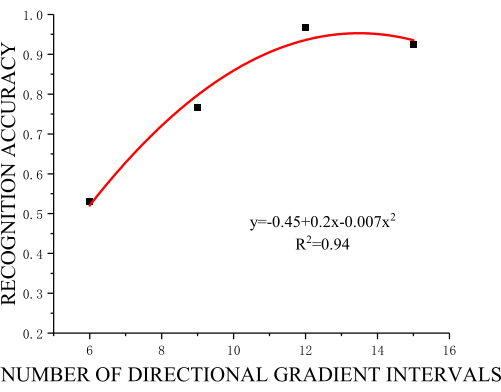
Figure 12: Directional gradient statistical interval number-recognition accuracy relationship. The influence of directional gradient statistical interval number on the recognition accuracy of SVM Please click here to view a larger version of this figure.
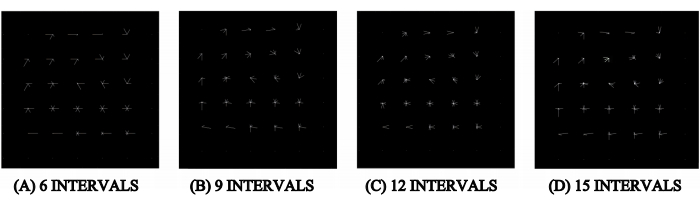
Figure 13: Computation results of the directional gradient characteristics of the number of different directional gradient statistical intervals. The directional gradient characteristics results of the sample are obtained when different directional gradient statistical intervals are set. (A) 6 directional gradient statistical intervals, (B) 9 directional gradient statistical intervals, (C) 12 directional gradient statistical intervals, (D) 15 directional gradient statistical intervals. Please click here to view a larger version of this figure.
Table 1: SVM identification test factor level. The influence of the calculation parameters of the directional gradient feature vector on the accuracy of the SVM to identify the concrete vibration state is analyzed. Please click here to download this Table.
Table 2: Directional gradient histogram parameter analysis test results. Based on the test scheme in Table 1, the recognition accuracy results are obtained. Please click here to download this Table.
