The above paradigm is implemented by Du and colleagues in a series of studies3,4,5. We use a part of data adopted from one of these studies4 to represent the usage of the foot-stepping SRT task. In this study, there are 6 learning blocks and a RSI of 700 ms is used. Visual stimuli followed sequence A (i.e., 1423564215; Figure 1a) in blocks 1 to 4 and 6, and followed sequence B (i.e., 3615425214) in block 5. The response-stimulus interval is set as 700 ms. Figure 2a illustrates 12 young adults' mean response times across six learning blocks. The response time here in the foot-stepping SRT task reveals the same pattern and comparable magnitudes to response time which were previously observed in the classic finger-pressing SRT task2,25,26. In particular, response time to a novel sequence is significantly slower in block 5 compared with the learned sequence in block 4 (difference = 83.4 ms ± 13.19, mean ± standard error; p <0.001), indicating learning of the sequence1,2. Although sequence learning under finger-pressing and foot-stepping tasks has not been compared directly, the similar magnitude and pattern in response time suggest that implicit motor sequence learning may not be affected by the presence of postural control requirements in typically developed adults.
Figure 2b illustrates two components of response time: RT and MT. Mean RT exhibits the same pattern as response time. In particular, RT in block 5 is slower than that in block 4 (difference = 93.19 ms ± 12.69; p <0.001). Unlike response time and RT, MT is comparable between blocks 4 and 5 (difference = -7.73 ms ± 3.88; p = 0.072). The same RT and MT results have been reported in our other studies3,5. These results together suggest that sequence learning is most likely to be reflected by RT, a proxy to cognitive processing, rather than MT, which characterizes the movement itself.
Figure 3 and Figure 4 depict examples of the directions along which the COM moves 100 ms before the stimuli appears. The direction of the COM for each stimulus is very inconsistent at the beginning (i.e., block 1), and these seemingly random movement directions do not change across blocks in one participant (Figure 3). For another participant (Figure 4), however, these random movement directions become more consistent as learning progressed across blocks. Figure 5a shows the significant changes in the movement direction variability across blocks (F(5,55) = 3.07, p <0.05). Specifically, the variability increased from block 4 to 5 (p <0.05), indicating that the COM movement direction would be an evident sign of motor sequence learning in the SRT task.
More importantly, the anticipatory center of mass movement is likely to reflect the explicit process operating in implicit motor sequence learning. The increased variability from block 4 to 5 was demonstrated only in participants (n = 6, p <0.05) who acquired, at least partially, the explicit knowledge of the sequence, but not in participants (n = 6, p = 0.98) who did not show explicit knowledge; Figure 5b highlights this sequence knowledge. Moreover, the change in variability from block 4 to 5 is significantly correlated to the amount of explicit knowledge acquired by participants (Figure 5c).
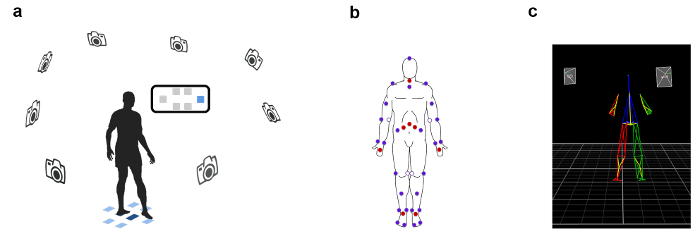
Figure 1: Experimental set-up. (a) Eight cameras are appropriately positioned so that clear data from all markers can be collected. Six stepping targets on the floor correspond to six visual stimuli shown on the monitor. (b) 38 spherical reflective markers of a 0.5 cm diameter each are attached on the skin at significant bony landmarks. These bony landmarks include the vertex, 7th cervical vertebra, sternal notch, acromions, elbows (lateral and medial), upper arms, wrists (radial and ulnar), 3rd knuckles, anterior superior iliac spines (ASIS), posterior superior iliac spines (PSIS), center between two PSISs, knees (lateral and medial), tibias, ankles (lateral and medial), calcaneus, big toes, and 5th metatarsals. Purple markers: markers visible from the front view; red markers: markers on the back; white markers: markers removed after the static trial. (c) A skeleton template based on the set-up of 38 markers. Please click here to view a larger version of this figure.
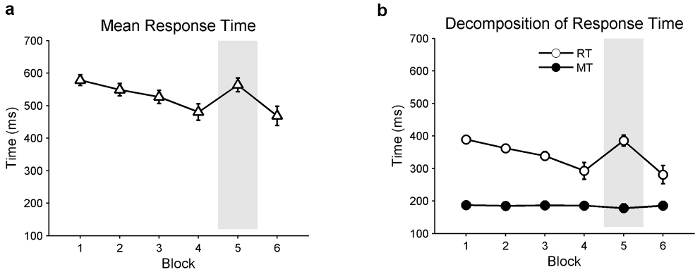
Figure 2: The decomposition of response time into RT and MT. (a) The mean response times across blocks. The gray area represents block 5 where the appearance of stimuli follows a novel sequence. Sequence learning occurs as revealed by a slower response time in block 5 than that in block 4. (b) RT, as a component of response time, exhibits the same pattern as response time, while MT does not change from block 4 to block 5. Error bar: Standard error of the mean. Please click here to view a larger version of this figure.
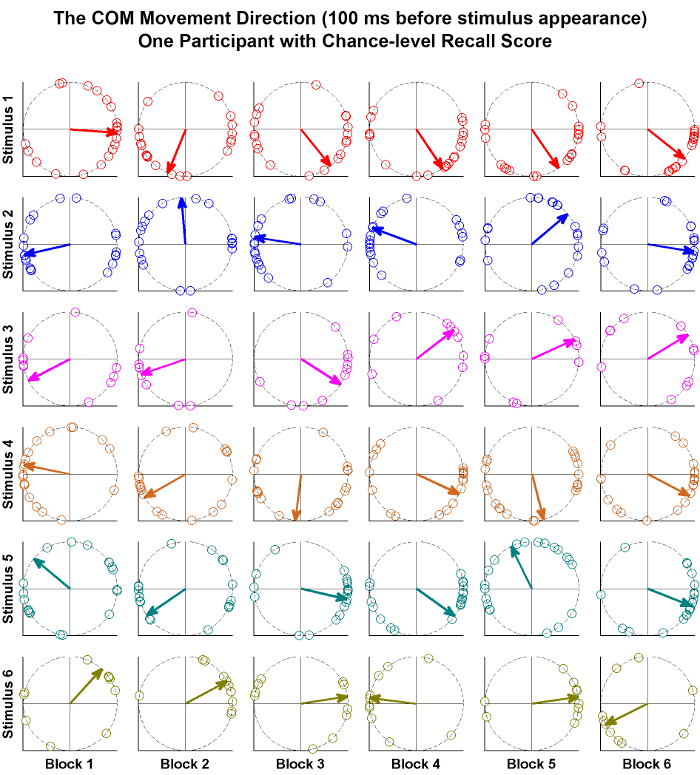
Figure 3: The COM movement direction from one participant with no explicit sequence knowledge. The COM movement direction is shown for each stimulus (stimuli 1- 6, see Figure 1a) across blocks. The COM could move from the origin to any position on the dashed circle, which represents all directions the COM could move. Empty circles represent the observed directions. The solid arrow represents the mean direction. Please click here to view a larger version of this figure.
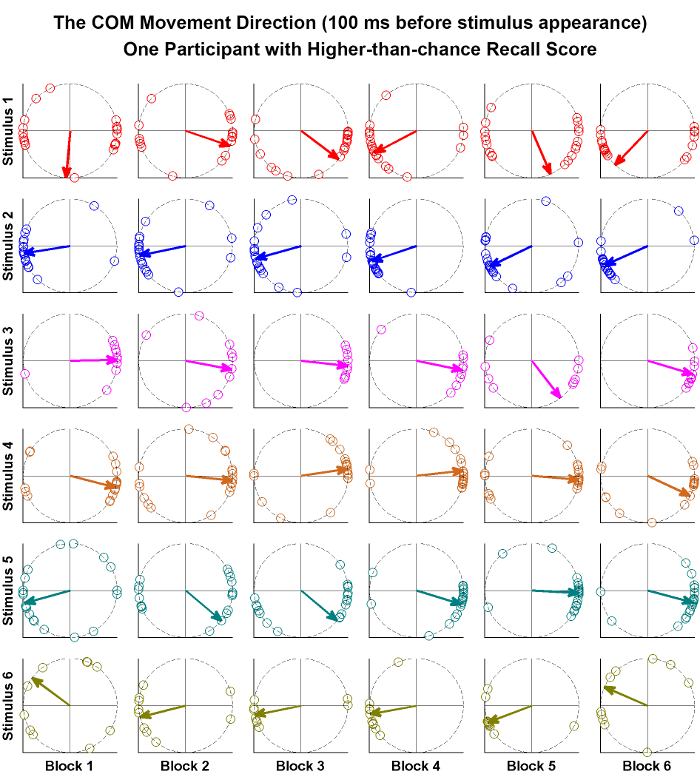
Figure 4: The COM movement direction from one participant with explicit sequence knowledge. The COM movement direction is shown for each stimulus (stimuli 1 – 6, see Figure 1a) across blocks. The COM could move from the origin to any position on the dashed circle that represents all directions the COM could move along. Empty circles represent the observed directions. The solid arrow represents the mean direction. Please click here to view a larger version of this figure.
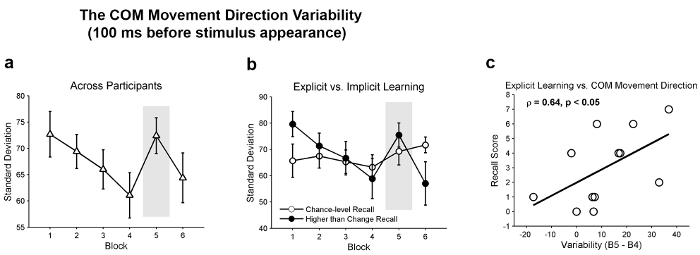
Figure 5: The variability in COM movement directions and its relationship with the explicit and implicit processes involved in sequence learning. The movement direction is quantified by the length of the arc between each empty circle and the point where the mean arrow points to in Figure 3 and Figure 4. This is equivalent to the angle (in degrees) from the mean movement direction to the line connecting the origin and each empty circle. The variability is computed as the standard deviation across angles. (a) The mean variability across blocks: The gray area represents block 5, where the appearance of stimuli follows a novel sequence. The variability increased from block 4 to 5. (b) Such changes in the COM movement direction variability are shown only in the participants who acquire, at least partially, explicit knowledge of the sequence, but not in participants who do not show explicit knowledge of the sequence. (c) The change in variability from block 4 to 5 is significantly correlated to the amount of explicit knowledge acquired by participants. Error bar: Standard error of the mean. Please click here to view a larger version of this figure.
