Figure 4 shows images of grids prepared during a single time-resolved Spotiton session by mixing RNA polymerase and a 105 bp DNA oligomer carrying a promoter sequence for 150 ms prior to vitrification15. Seen in the figure are images taken by the two high-speed cameras of six grids at two timepoints following sample application. These cameras, unique among plunge-style freezers, allow the user to immediately decide whether to keep or discard a grid based on the observed extent of wicking by the nanowires and the likelihood the liquid samples were drawn into an aqueous layer thin enough for EM imaging. Although a single grid can provide sufficient ice for a complete dataset, once optimal conditions have been achieved, several grids are prepared to keep on hand in the event one or more is lost or contaminated. Of the six grids prepared in this session, the image captures show only one with suboptimal wicking (Figure 4F).
The grids shown were prepared (steps 2.5.1 through 2.5.8) in succession over a period of 40 min after an hour to ready the samples and the machine as described in the protocol (steps 1.1.1 through 2.4.6). Of the six grids, two were used for data collection, and the rest were saved for later analysis if needed. The pattern of ice on a vitrified grid (Figure 5C) matches closely the pattern of deposited liquid seen in the upper camera image (Figure 5B). Effective wicking of the mixed samples, made apparent by the lack of a visible liquid stripe in the lower camera image (Figure 5A), occurs along the nanowire-covered grid bars, and sample rarely overflows into squares adjacent to those in which it landed. Within ice-filled squares, the ice is typically thickest within holes at the center of the square and becomes thinner in holes closer to the grid bars (Figure 5E). Often holes immediately adjacent to the grid bars are empty due to proximity to the nanowires (Figure 5F).
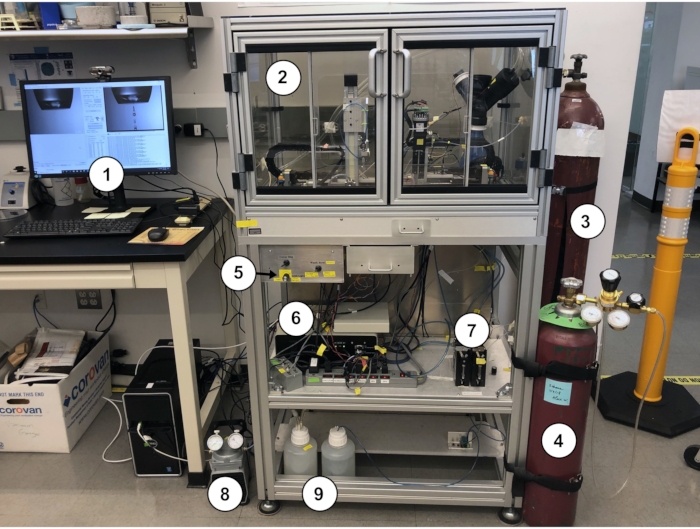
Figure 1: The time-resolved Spotiton system. 1. Operator's workstation; 2. Environmental chamber; 3. Nitrogen supply; 4. Ethane supply 5. Backlight control for upper plunge path camera 6. Piezoelectric dispenser controllers; 7. Syringe pumps; 8. Vacuum pump; 9. Wash water supply and waste bottles. Please click here to view a larger version of this figure.
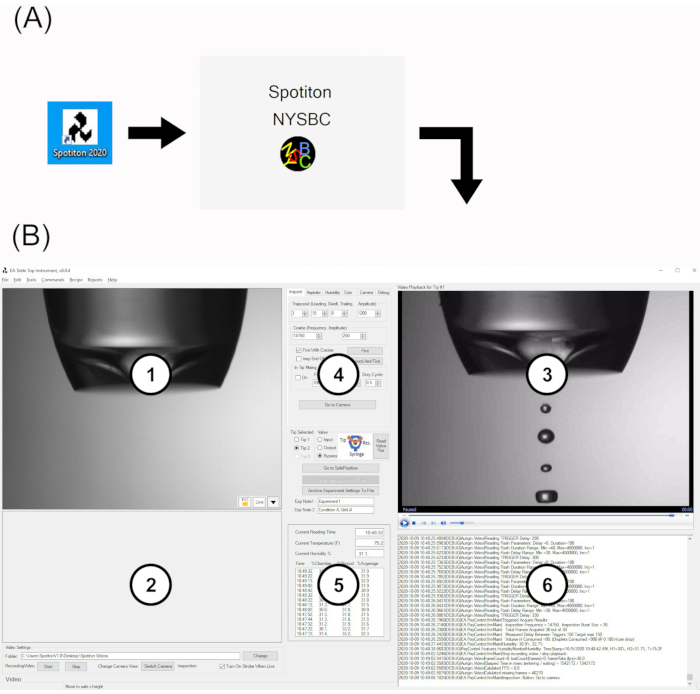
Figure 2: Spotiton software user interface. (A) Desktop icon and splash screen. (B) The main UI is composed of six areas: 1. display area for upper plunge path ("upper") and tip inspection cameras; 2. display area for lower plunge path ("lower") camera; 3. Playback area for tip inspection videos; 4. Multifunction tab area; 5. Live humidity monitor; 6. Live system logfile. Abbreviation: UI = user interface. Please click here to view a larger version of this figure.
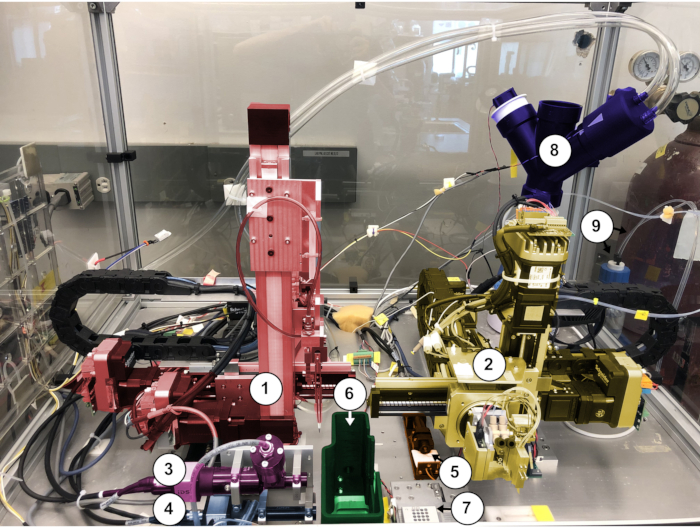
Figure 3: Interior view of Spotiton chamber (robots in SafePosition). 1. Grid robot (red); 2. Dispenser robot (yellow); 3. Upper plunge path camera (pink); 4. Lower plunge path camera (light blue); 5. Tip inspection camera (orange); 6. Humidity shroud (green); 7. sample tray; 8. Nebulizer assembly (dark blue); 9. System reservoir and water lines. Please click here to view a larger version of this figure.
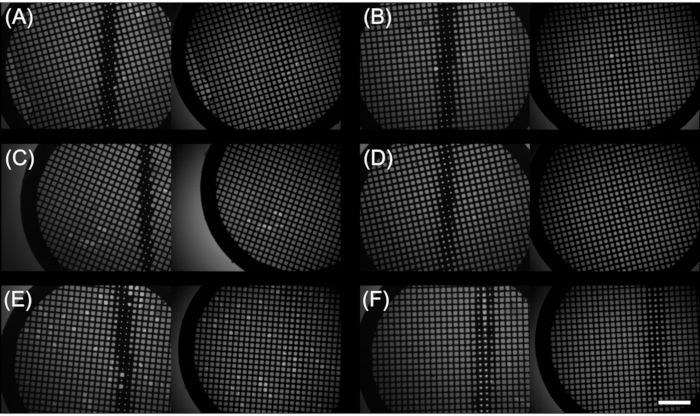
Figure 4: Representative system camera images from a time-resolved Spotiton grid making session. (A–F) Upper (left) and lower (right) plunge path camera images of six grids onto which RNA polymerase and a promoter DNA sequence were applied using Spotiton. Scale bar = 500 µm. Please click here to view a larger version of this figure.
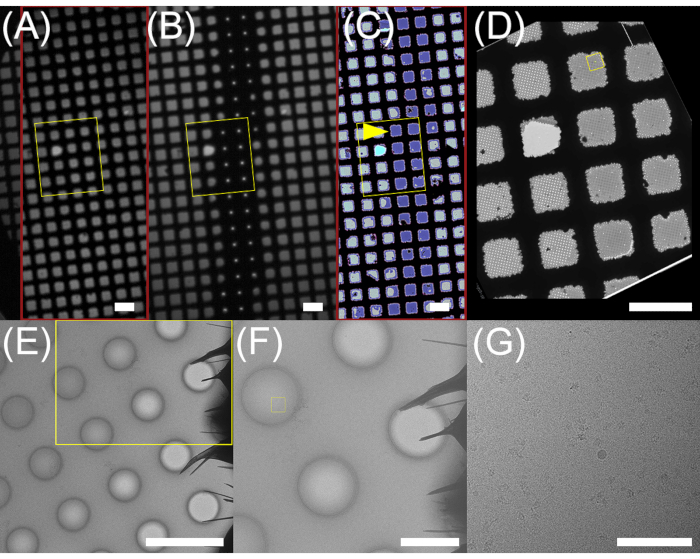
Figure 5: Pattern of ice deposition on a Spotiton-prepared grid. Portions of the (A) lower and (B) upper camera images and (C) atlas of the grid shown in Figure 4F. Approximate locations of ice resulting from sample deposition and mixing are colored lavender. Areas within the square marked with a yellow arrowhead are imaged in (E–G). The region shown in (E) is boxed in yellow in (D). Representative square (E), hole (F), and (G) exposure images collected from the grid shown in (A–D). The boxed areas in the square and hole images correspond to the hole and exposure images, respectively. Scale bars = 100 µm (A–D), 5 µm (E), 2 µm (F), 100 nm (G). Please click here to view a larger version of this figure.
Figure S1: Inspection of tip firing. A live view of Tip 2 firing is seen in the upper camera monitor on the left of the User Interface, while a recording made previously of Tip 1 firing plays on a loop for comparison in the video playback area on the right. Please click here download this File.
Figure S2: Ultrasonic cleaning of dispenser tips. An air bubble in the (A) tip will disrupt droplet formation and prevent tip firing. (B) Tips immersed in water at the ultrasonic cleaning station to remove an air bubble or clear dried protein blocking the tip orifice. Please click here download this File.
Figure S3: Loading grid in tweezers. (A) A grid placed nanowire side up on the edge of the grid block. (B) A grid positioned correctly in the self-closing tweezers. Please click here download this File.
Figure S4: Humidity tracker. The percent relative humidity in the chamber (dark blue) and shroud (light blue) as recorded during a typical grid-making session. The times of grid plunges (green squares) are plotted on the graph. Please click here download this File.
Figure S5: Wicking on nanowire grids during a plunge. Representative upper (A, C, E) and lower (B, D, F) plunge path camera images of wicking on nanowire grids that is too slow (A, B), ideal (C, D), and too fast (E, F). A slight thickening (white arrowheads) indicates grid bars with nanowires that have been saturated by sample. Squares in these regions typically contain ice of appropriate thickness for electron microscopic imaging. Scale bar = 500 µm. Please click here download this File.
