Artificial spin-ice (ASI) lattices
Artificial spin ices are lithographically defined two-dimensional networks of interacting nanomagnets. They exhibit frustration by design (i.e., the existence of many local minima in the energy landscape)21,42,43. High-resolution MFM imaging to elucidate the magnetic configurations and interactions between the array components offers the unique opportunity to better understand the spin-ice state of the lattice21. Spin-ice lattices for MFM imaging were prepared via electron-beam lithography on a coplanar wave guide (CPW) consisting of 10 nm thick titanium (Ti) and 150 nm thick gold (Au) deposited on a silicon wafer (Figure 1A). The ASIs were composed of 20 nm thick CoFe (Co90Fe10) and/or Py (Ni80Fe20) patterned to form ~260 nm x ~80 nm nanoscale bar magnets arranged in both single (i.e., only CoFe or Py) and bicomponent (i.e., CoFe and Py) square28 and hexagonal (honeycomb)44 arrays. The resultant arrays of nanoscale bar magnets were imaged via scanning electron microscopy (SEM), with SEM images of exemplar single component (CoFe only) square and hexagonal arrays shown in Figure 1B. Although there is significant interest within the ASI research community regarding ASI ground states, for the samples investigated here an external magnetic field was applied along the long axis of the CPW after fabrication, resulting in an in-plane orientation of the ASI magnetic moments. Figure 1C shows the 16 possible moment configurations of a square ASI lattice, as well as the eight possible moment configurations of a honeycomb ASI lattice. High-resolution glovebox MFM as described in the protocol was then used to image both single and bicomponent square and hexagonal ASI lattices.
Figure 2 presents instructive AFM topography and MFM magnetic phase images of representative square and hexagonal lattice arrays obtained in an inert atmosphere glovebox before fully optimizing MFM imaging parameters. Examination of the topography images in Figure 2A and Figure 2D shows a shadowing effect on the left side of the vertical lattice members that is indicative of a tip artifact (double tip). The streaks seen in the corresponding MFM phase images in Figure 2B (slight) and Figure 2E (more pronounced) are the result of phase jumps or offsets, likely due to the probe striking the sample surface during the lift mode pass (i.e., topographical interference due to slightly too low a lift height or too large an oscillation amplitude in the interleaved lift mode pass). Conversely, the speckled, fuzzier nature of the phase image in Figure 2H is due to decreased signal to noise (i.e., sensitivity) arising from the reverse problem of too high a lift height or too small an oscillation amplitude in the interleaved lift mode pass relative to the optimal values. Nevertheless, despite these issues in terms of suboptimal image quality, the overlays of the MFM magnetic phase data on the 3D topographies of the three lattices show that, relative to the schematics shown in Figure 1C, the square arrays, whose ground state is a type I configuration, adopt a type II configuration following application of the external magnetic field (aligned along the vertical axis in Figure 2C,F)26,27. Meanwhile, the hexagonal array adopts a type I configuration (external magnetic field was applied along the horizontal axis in Figure 2F,I)26. Additionally, in Figure 2C, the magnetic phase contrast is noticeably stronger for the horizontal (CoFe) lattice components than for the vertical (Py) components. In Figure 2F, the ASI composition is reversed (i.e., the vertical lattices are composed of CoFe, while the horizontal lattices are Py), and likewise the magnetic phase contrast is reversed, as it is now the vertical (CoFe) lattice components that show the greater contrast. These two bicomponent square ASIs were located adjacent to each other on the same CPW and imaged one after the other, with the same probe and imaging conditions. Thus, the heightened magnetic phase contrast seen in both images for the CoFe component relative to the Py component is indicative of CoFe's larger magnetic dipole moment.
As alluded above, perhaps the easiest mistake to make in attempting to obtain high-resolution MFM images is employing too low a lift scan height, or alternatively, too high a drive amplitude for the chosen lift height. This results in topographic crosstalk or interference in the magnetic phase channel. An extreme example of this is shown in Figure 3, where the phase images (Figure 3B,D) look strikingly similar to the corresponding sample topography images (Figure 3A,C). In the case of Figure 3A,B, a lift height of 11 nm was used, and the interleave drive amplitude was greater (680 mV) than the main line topography drive amplitude (640 mV), leading to the probe simply mapping the sample topography rather than the desired magnetic phase during the lift mode pass. In Figure 3C,D, a slightly higher lift height was employed (12 nm), and the interleave drive amplitude (686 mV) was decreased to be slightly lower than the main line topography drive amplitude (700 mV). As a result, although the phase image in Figure 3D still shows clear evidence of topography artifacts (i.e., phase shifts arising from tip-sample van der Waals interactions), it also contains intermingled actual magnetic phase response at the hexagonal ASI lattice array junctions. However, the magnetic phase image in Figure 3D is not a reliable indicator of the true magnetic moment orientation of the individual ASI array elements because of co-mingling of topography response due to the oscillation amplitude still being too large for the low lift height employed. Figure 3D serves as a stark visual reminder that users must exercise extreme caution in interpreting MFM magnetic phase images when operating with low lift heights, and always confirm there is no topographic interference causing artifacts in the magnetic phase image (see final Note in the Protocol).
Despite the examples to the contrary in Figure 3, following the procedure described in the Protocol, lift heights as low as 10 nm were routinely achieved on these ASI samples in the glovebox with no topographic interference. To aid the reader, Figure 4 displays a progression of images of a single component (Py only) square ASI lattice obtained while optimizing the MFM imaging parameters, with Figure 5 showing the final, optimized image of that ASI. Figure 4A,B is reminiscent of Figure 2H, with too high a lift height (Figure 4A) and/or too small a drive/oscillation amplitude in the lift mode pass (Figure 4A,B) for optimal sensitivity and resolution. Conversely, the magnetic phase image seen in Figure 4C is extremely crisp, with a lift height of 10 nm and a lift mode drive amplitude only slightly less than the main line topography drive amplitude; however, it is starting to show slight evidence of topographical artifacts along the array component boundaries (white ovals). Thus, by slightly decreasing the lift mode drive amplitude, the optimized MFM images presented in Figure 4D and Figure 5 are obtained, with topographical interference in the MFM magnetic phase avoided.
Magnetic shape memory alloy (MSMA)
When grown as a highly pure single crystal, Ni-Mn-Ga is a prototypical MSMA34. Ni-Mn-Ga crystals typically contain numerous twin boundaries, occurring wherever two twin domains meet, with surface relief indicating the location of the twin boundaries and the magnetization direction and crystallographic orientation changing between adjacent twin domains16. Consequently, MFM can be used to image twin boundaries and track their movement in response to an applied magnetic field or force36,45. Figure 6 displays the magnetic phase image of a polished single crystal Ni-Mn-Ga sample (Figure 6A), as well as the magnetic phase image overlaid as a colored skin on top of the sample's 3D topography (Figure 6C). The images clearly display how and where the twin boundaries line up with the magnetic orientation; Figure 6A shows the characteristic stair step magnetic orientation across the twin boundaries, while Figure 6C shows the long direction of the magnetic domains switching at the topographical features (i.e., extended diagonal ridges and valleys running from lower left to upper right of the images) indicative of the twin boundaries46. As with the ASI images, the Ni-Mn-Ga MFM image(s) were acquired in an inert atmospheric glovebox to help eliminate the presence of surface water due to ambient humidity and thereby enable low lift heights (15 nm in the case of the images shown in Figure 6), for increased resolution and sensitivity to resolve the ~200 nm wide magnetic domains seen throughout Figure 6A and in the Figure 6B zoom acquired in the central region of the image indicated by the blue square in Figure 6A.
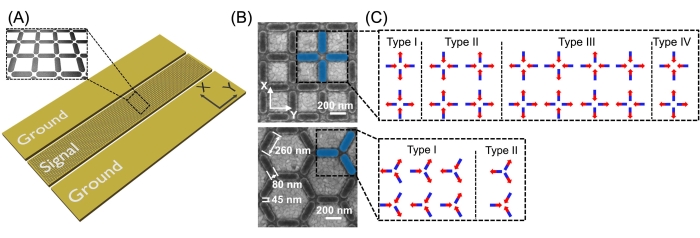
Figure 1: Square and honeycomb artificial spin-ice networks. (A) Schematic of the experimental configuration. Extended artificial spin-ice (ASI) networks are patterned on the top of the signal line of a coplanar waveguide made of Ti/Au via electron-beam lithography. The inset shows a magnified image of a square ASI structure. The bias of the applied external magnetic field is oriented along the long side (Y-direction) of the coplanar waveguide. (B) Scanning electron micrographs of representative square and honeycomb ASI lattices (CoFe only) with the dimensions of the elements. (C) Schematic depicting the 16 possible moment configurations of a square artificial spin-ice lattice and eight possible moment configurations of a honeycomb artificial spin-ice lattice. Please click here to view a larger version of this figure.
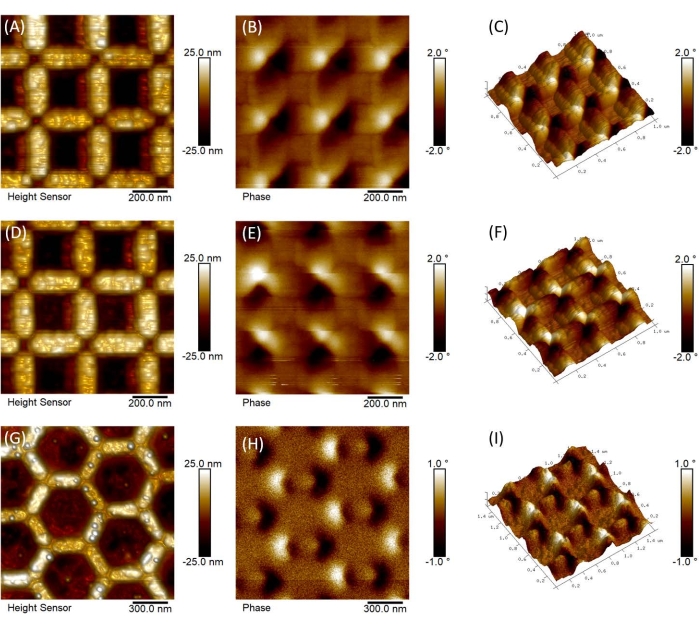
Figure 2: MFM imaging of magnetic moment configurations in ASI networks. AFM topography (left column; A,D,G) and corresponding MFM magnetic phase images (middle column; B,E,H) of representative bicomponent (CoFe and Py) square (top and middle rows; A–F), and single component (CoFe only) hexagonal (bottom row; G–I) ASI lattice arrays prior to full optimization of MFM imaging parameters. The right column (C,F,I) displays the 3D AFM topography of each ASI sample with the corresponding MFM phase channel overlaid as a colored skin to show the relative alignment of the magnetic dipole moments within the ASI structures. Following application of an external magnetic field, the square lattice ASIs adopt a type II configuration (field applied along the vertical axis, corresponding to the Py elements in A-C and the CoFe elements in D-F), whereas the hexagonal lattice (field applied along the horizontal axis in this image) adopts a type I arrangement (see Figure 1C). Please click here to view a larger version of this figure.
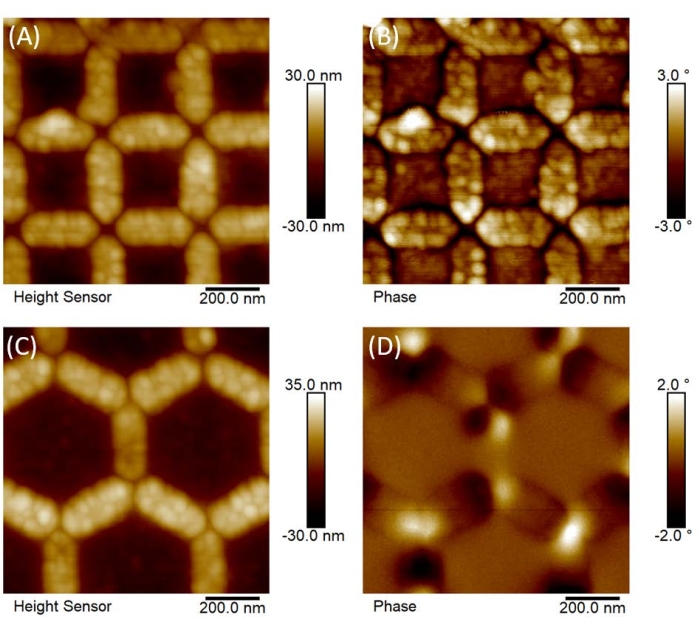
Figure 3: Topographical artifacts in MFM magnetic phase images. Representative AFM topography (left column; A,C) and MFM magnetic phase (right column; B,D) images of a single component (Py only) square ASI (top; A-B) and bicomponent (CoFe = vertical elements; Py = oblique elements) honeycomb ASI (bottom; C-D) showing clear evidence of topographic artifacts in the MFM magnetic phase images. (A) Drive amplitude = 640 mV, (B) Lift height = 11 nm, Drive amplitude = 680 mV, (C) Drive amplitude = 700 mV, (D) Lift height = 12 nm, Drive amplitude = 686 mV. Please click here to view a larger version of this figure.
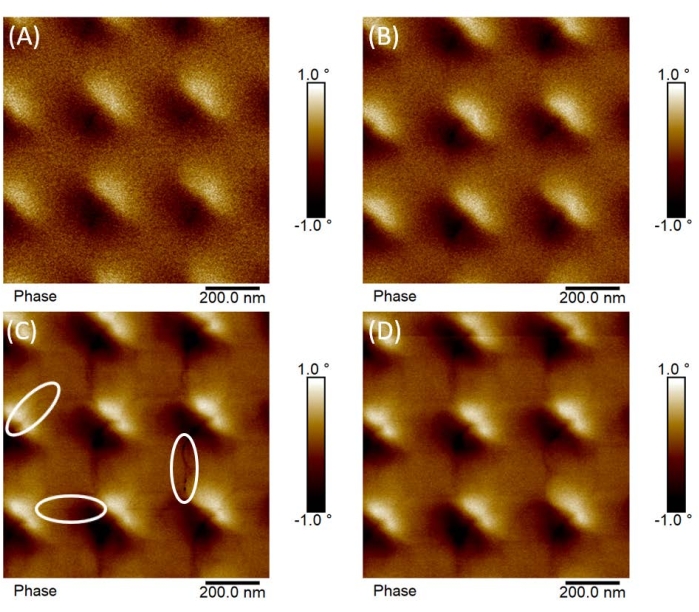
Figure 4: Progression in MFM phase image quality with parameter optimization. Progression in MFM phase image quality for a single component (Py only) square ASI lattice array as the MFM imaging parameters are sequentially/iteratively optimized: (A) Lift scan height = 15 nm, Drive amplitude = 80 mV; (B) Lift scan height = 10 nm, Drive amplitude = 110 mV; (C) Lift scan height = 10 nm, Drive amplitude = 240 mV; (D) Lift scan height = 10 nm, Drive amplitude = 220 mV. For reference, the main (topography) line drive amplitude was held constant at 250 mV, corresponding to ~50 nm free space amplitude, for all images. As indicated by the white ovals, image (C) shows evidence of slight topographical artifacts beginning to appear in the phase image (dark lines emanating from the array junctions along the edges of the nanomagnets), indicating the lift scan height is too low or interleave mode amplitude is too high. By slightly decreasing the interleave amplitude in (D), the topographical artifacts virtually disappear without noticeably sacrificing image quality. Please click here to view a larger version of this figure.
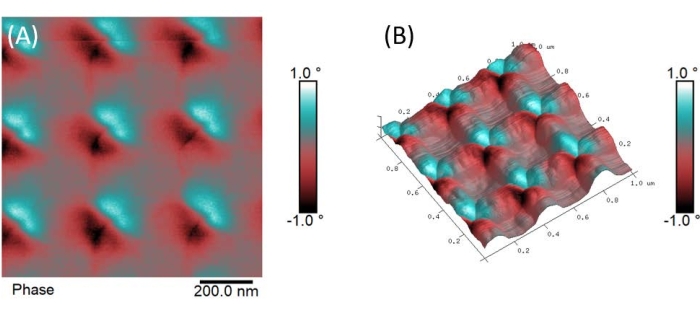
Figure 5: Fully optimized MFM magnetic phase image. Fully optimized MFM magnetic phase images of the representative single component (Py only) square ASI lattice array in Figure 4. (A) 2D magnetic phase image. (B) 3D topography with magnetic phase overlaid as a colored skin showing the ASI exhibits a type II configuration (see Figure 1C) following application of an external magnetic field along the vertical axis. Please click here to view a larger version of this figure.
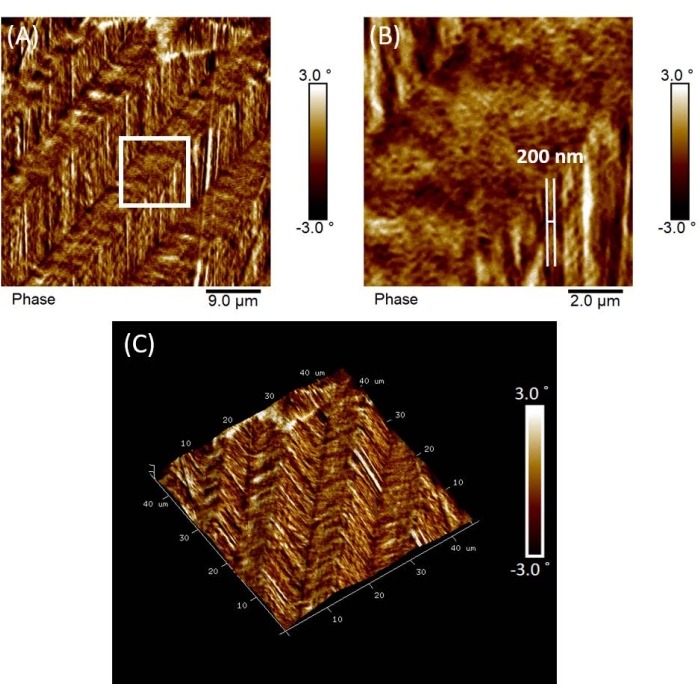
Figure 6: MFM imaging of magnetic twin boundaries in a single crystal Ni-Mn-Ga sample. (A) 45 µm x 45 µm MFM magnetic phase image of a single crystal Ni-Mn-Ga sample with diagonal twins' present exhibiting the expected ~90° stair step magnetic orientation pattern across the twin boundaries. (B) Zoomed higher resolution (pixel density) MFM magnetic phase image acquired of the 10 µm x 10 µm region indicated by the white square in (A) showing the alternating magnetic domains are ~200 nm wide. (C) MFM magnetic phase image from (A) overlaid as a colored skin atop the 3D sample topography, showing that magnetization direction switching occurs at the twin boundaries as evidenced by its alignment with the topographical surface relief features seen running from lower left to upper right at ~45° with respect to the scan direction/image. Please click here to view a larger version of this figure.
Supplementary Figure S1. Probe holder mounting block with three probe mounting stations. Please click here to download this File.
Supplementary Figure S2. Schematic of the standard probe holder for the Dimension series' AFM heads. Please click here to download this File.
Supplementary Figure S3. Magnetizing a MFM probe. (A) The magnet removed from its case and being placed on the probe. (B) The magnet after being place on the probe. Please click here to download this File.
Supplementary File 1. A general standard operating protocol for using magnetic force microscopy (MFM). Please click here to download this File.
