This open-source virtual reality behavioral setup allowed us to quantify licking behavior as a read-out of spatial learning as head-restrained mice navigated a virtual linear track environment. Seven C57BL/6 mice of both sexes at 4 months of age were placed on a restricted water schedule and first trained to lick continuously at low levels while running on the wheel for random spatial rewards ("random foraging") without VR. Although their performance was initially affected when moved to the VR projection screen setup with a 2 m random hallway pattern, it returned to previous levels within several VR sessions (Figure 4A). The mice that developed the random foraging strategy with VR (six of the seven mice, 86%; one mouse failed to run consistently and was excluded) were then required to lick at an uncued operant reward zone at 0.5 m following a single visual location cue in the middle of an otherwise featureless 2 m virtual track in order to receive water rewards ("hidden reward task"). According to the current pilot data with this system, four of the seven (57%) mice were able to learn the hidden reward task with a single visual cue in two to four sessions, as shown by licking near the reward zone with increasing selectivity (Table 1, Figure 4B,C), which is similar to our previous results with a non-VR treadmill17. This fact is important in the study of spatial learning, as it allows for the monitoring and/or manipulation of neural activity during critical periods of learning without extensive training. Furthermore, the mice exhibited both substantial within-session as well as between-session learning (Figure 4C), providing an opportunity to observe both the short-term and long-term neural circuit adaptations that accompany spatial learning. We did not test the learning rate of an equivalent non-VR task, but many classical real-world hippocampus-dependent spatial tasks, such as the Morris water maze, require even more extensive training and present dramatically fewer behavioral trials and, thus, are less suitable for the monitoring of learning behavior along with neural activity changes.
While a majority of mice in this pilot group (57%) were able to learn the hidden reward task in a small number of sessions, additional mice may exhibit spatial learning over longer timescales, and individualized training should increase this fraction of mice. Indeed, variations in learning rates may be useful for dissociating the specific relationships between neural activity in brain areas such as the hippocampus and behavioral learning. However, we observed that a small percentage of mice did not learn to run on the wheel or lick for either non-operant or operant rewards (one of the seven mice, 14%) and, thus, could not be used for subsequent experiments. Additional handling and habituation and a reduction in the general state of stress of the animal through further reinforcement, such as by using desirable food treats, may be useful for helping these animals adopt active running and licking during head-restrained behavior on the wheel.
By manipulating the presence and position of the cue and reward zones on intermittent laps on the virtual track, an experimenter may further discern the dependence of spatially selective licking on specific channels of information in VR to determine, for example, how mice rely on local or distant cues or self-motion information to establish their location in an environment. The licking selectivity of mice that have learned the hidden reward location should be affected by the shift or omission of the visual cue along the track if they actively utilize this spatial cue as a landmark, as we have shown in a recent work using spatial olfactory cues20. However, even with the simple example we have presented here, the highly selective licking achieved by the mice (Figure 4C, right) indicates that they encode the VR visual environment to inform their decisions about where they are and, therefore, when to lick, as the reward zone is only evident in relation to visual cues in the VR environment. This VR system also allows the presentation of other modalities of spatial and contextual cues in addition to the visual VR environment, such as olfactory, tactile, and auditory cues, which can be used to test the selectivity of neural activity and behavior for complex combinations of distinct sensory cues. Additionally, although we did not test for the dependence of task performance on hippocampal activity, a recent study using a similar task but with tactile cues showed a perturbation of spatial learning with hippocampal inactivation23, which should be confirmed for the VR hidden reward task performed in this study.
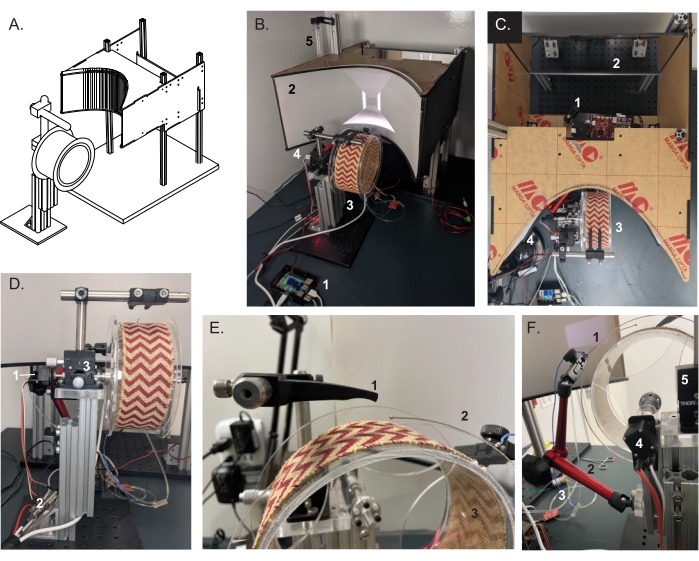
Figure 1: Head-restrained VR hardware setup: Projection screen, running wheel, and head-fixation apparatus. (A) A 3D design schematic of the running wheel and projection screen. (B) Completed VR behavioral setup. The VR environment is rendered on (1) a single-board computer and projected onto a parabolic (2) rear-projection screen (based on Chris Harvey's lab's design15,16). (3) Wheel assembly. (4) Head post holder. (5) Water reservoir for reward delivery. (C) Top view of the projection screen and behavioral setup. (1) LED projector. (2) Mirror for rear-projecting the VR corridor onto the curved screen. (3) Running wheel. (D) Rear view of the wheel assembly. Wheel rotations are translated by the (1) rotary encoder and transmitted to the single-board computer via an (2) ESP32 microcontroller. (3) A dual-axis goniometer is used to fine-tune the head position for optical imaging. (E) Setup at the level of mouse insertion, showing the (1) head-fixation apparatus and (2) lick port placement over the (3) running wheel surface. (F) Photograph of the (1) lick port attached to the (2) flex arm for precise placement of the reward spout near the mouth of the mouse. Rewards are given via a (3) solenoid valve controlled by the behavior ESP32 (via the OpenMaze OMwSmall PCB). Also visible is the rotary encoder coupled to the (4) wheel axle and (5) the goniometer for head angle adjustment. Please click here to view a larger version of this figure.
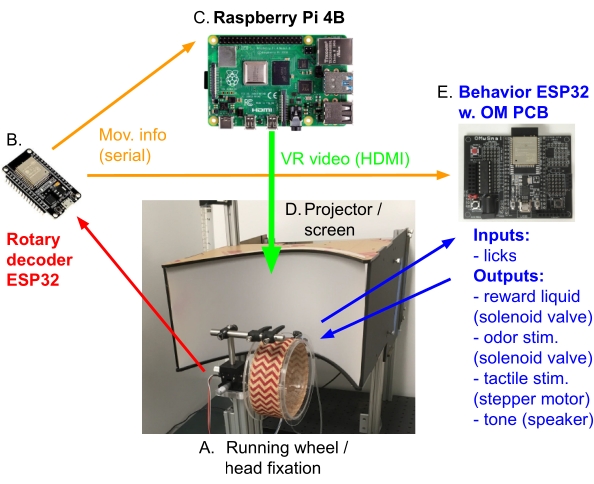
Figure 2: VR electronics setup schematic. This schematic depicts the most relevant connections between the electronic components in the open-source virtual reality system for mice. (A) Mice are head-restrained on a custom 3D-printed head-fixation apparatus above an acrylic running wheel. (B) The rotation of the wheel axle when the mouse is running is detected by a high-resolution rotary encoder connected to a microcontroller (Rotary decoder ESP32). (C) Movement information is conveyed via a serial connection to a single-board computer running the HallPassVR GUI software and 3D environment, which updates the position in the VR virtual linear track environment based on the mouse's locomotion. (D) The rendered VR environment is sent to the projector/screen via the HDMI #2 video output of the single-board computer (VR video HDMI). (E) Movement information from the rotary encoder ESP32 is also sent to another microcontroller (Behavior ESP32 with the OpenMaze OMwSmall PCB), which uses the mouse's position to control spatial, non-VR behavioral events (such as reward zones or spatial olfactory, tactile, or auditory stimuli) in concert with the VR environment and measures the mouse's licking of the reward spout via capacitive touch sensing. Please click here to view a larger version of this figure.
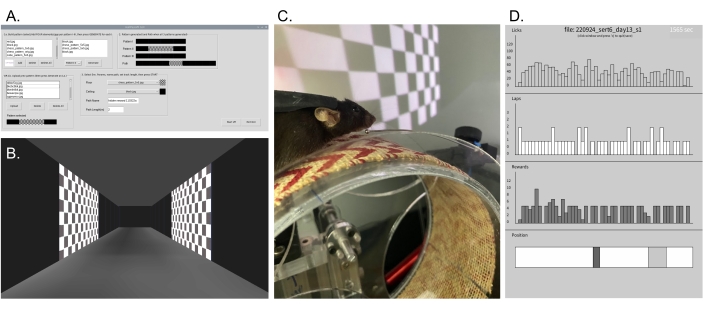
Figure 3: Graphical software GUI and behavior. (A) HallPassVR GUI: Four images are selected to tile over each spatial pattern covering one-third of the track length (or the previously saved combination pattern is loaded) for three patterns in each path equal to the track length. Ceiling and floor images are selected, and then Start is pressed to initialize the VR environment on the single-board computer's HDMI output (projection screen). (B) Example virtual corridor created with the GUI parameters shown in A and used for a hidden reward experiment to test spatial learning. (C) Photograph of a head-restrained mouse running on the wheel in the virtual environment shown in B. (D) The top panel shows the online plot of animal behavior in a VR environment from the included Processing sketch to record and plot the behavioral data. Licks, laps, and rewards are plotted per 30 s time bins for the 30 min session during hidden reward spatial learning. The bottom panel shows the current mouse position (black) and the location of any reward zones (gray) during behavior. Please click here to view a larger version of this figure.
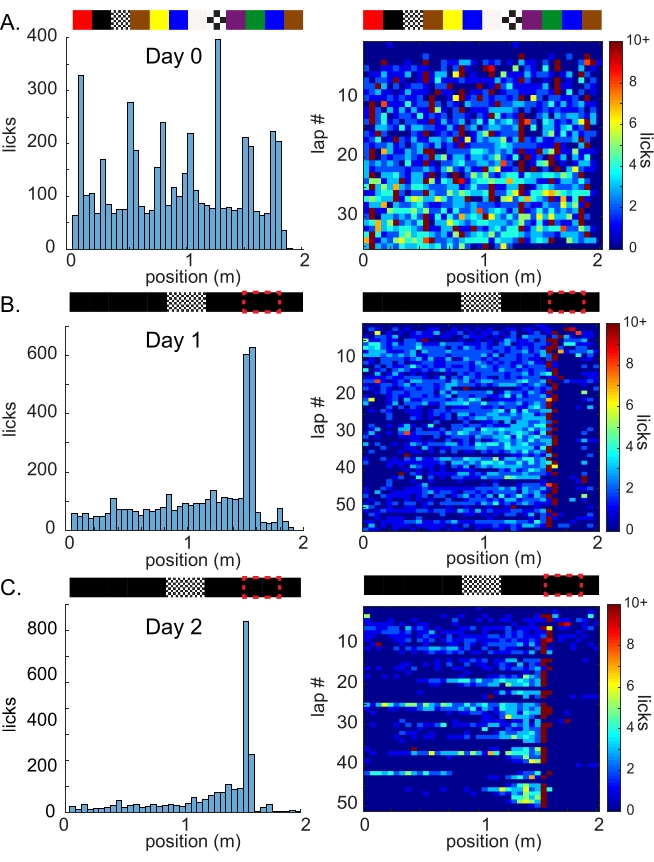
Figure 4: Spatial learning using the graphical software environment. Representative spatial licking data from one animal (A) during random foraging with random cues along the virtual linear track and (B–C) 2 days of training with a static hidden reward zone at 1.5 m with a single visual cue in the middle of the track. (A) Day 0 random foraging for four reward zones per lap, selected randomly from eight positions spaced evenly along the 2 m virtual linear track. (Left) The average number of licks per spatial bin (5 cm) over the 30 min session (top: VR hallway with random visual stimulus panels). (Right) Number of licks in each 5 cm spatial bin per lap during this session, represented by a heatmap. (B) Day 1, the first day of training with a single reward zone at 1.5 m (red box on the track diagram, top) using a virtual track containing a single high-contrast stimulus at position 0.8-1.2 m. (Left) Average spatial lick counts over the session, showing increasing licks when the animal approaches the reward zone. (Right) Spatial licks per lap, showing increased selectivity of licking in the pre-reward region. (C) Day 2, from the same hidden reward task and virtual hallway as Day 1 and from the same mouse. (Left) Total licks per spatial bin, showing a decrease in licks outside of the pre-reward zone. (Right) Spatial licks per lap on Day 2, showing increased licking prior to the reward zone and decreased licking elsewhere, indicating the development of spatially specific anticipatory licking. This shows that this animal has learned the (uncued) hidden reward location and developed a strategy to minimize effort (licking) in regions where they do not expect a reward to be present. Please click here to view a larger version of this figure.
| Behavioral outcome | Number of mice | Percentage of mice |
| Mouse did not run/lick | 1 | 14% |
| Random foraging only | 2 | 29% |
| Learned hidden reward | 4 | 57% |
| Total (N) | 7 |
Table 1: VR spatial learning behavioral pilot results. Seven C57BL/6 mice of both sexes at 4 months of age were progressively trained to perform a spatial hidden reward task in VR. Of these mice, one mouse did not run/lick after initial training (one of the seven mice, 14%), while six of the remaining mice learned to run on the wheel and lick for random spatial rewards in the random foraging step of training (six of the seven mice, 86%). Four of the six mice that were able to perform the random foraging behavior subsequently learned to lick selectively in anticipation of the non-cued reward in the hidden reward task (four of the seven mice, 57% of mice in total, four of the six mice, 66% of random foraging mice), while two did not (two of the seven mice, 29%).
