En svingning og reaktion board teknik blev præsenteret til estimering inertien egenskaber nedenfor knæproteser. Dette system blev valideret og bevisligt være pålidelige, når anslå inertielle egenskaber af kendte geometriske faste stoffer (bilag A). Protese lemmer inerti egenskaber for en gruppe af ensidige, transtibial amputerede blev anslået på to måder: a) ved direkte måling ved hjælp af svingning og reaktion bord teknikker, og b) ved hjælp af standard forudsigelse ligninger skabt til intakte lemmer. De resulterende inertielle ejendom estimater for protese lemmer var væsentligt forskellige for to tilgange. Denne forskel i inerti ejendomme resulterede i signifikant forskellige estimater af fælles kinetik under gang, med større forskelle bliver observeret under swing.
Selv betydelige forskelle i joint kinetik opstod under holdning ved hjælp af de to forskellige inerti parameterestimaterne, disse forskelle var sindkøbscenter, hvor overvejer virkningerne størrelser for disse forskelle, og i sammenligning med observerede forskelle i løbet af swing. I de fleste studier af menneskelig bevægelse, kan disse statistisk signifikante forskelle i holdning ikke have en indvirkning på resultaterne i undersøgelsen. Ground reaktionsstyrker har en stor indflydelse på de overordnede øjeblik omfanget af nedre ende leddene under standpunkt fase af at gå. 17-19 Selv om der var betydelige forskelle i inertien parametre for begge modeller, er disse forskelle ikke var nok til at overvinde betydningen af jorden udrykningsstyrke bidrag til den fælles øjeblik produktion i holdning. Miller 25 også tidligere foreslået, at inertien egenskaber af den protese side havde lille effekt på størrelsen af de nedre ende fælles kinetik under standpunkt fase af drift. Men Miller 25 kun tog hensyn til forskelle i masse og massemidtpunkt placering af lemmet, når ændring af prosthetic lemmer er inerti egenskaber for inverse dynamics model. Forskelle i inertimoment ikke tegnede sig for i modellen, men det blev foreslået, at selv hvis inertimoment blev fordoblet eller halveret ville det sandsynligvis have ringe effekt på størrelsen af den fælles øjeblik. Den Ia sigt bevægelsesligningen tegnede sig for mindre end 3% af den samlede fælles øjeblik på ethvert givet tidspunkt under den holdning fase af drift. I absolutte tal blev den største ændring i øjeblik størrelsesorden for vores undersøgelse observeret i hofteleddet øjeblik på ~ 11% af den gangart cyklus, hvor den gennemsnitlige størrelse var stigningen ~ 2 N · m. Det var cirka halvdelen af stigningen størrelsesorden, som blev observeret af Miller 25 i den holdning fase af drift. Vores resultater kombineret med de Miller antyder, at direkte mål for protese inerti, herunder inertimoment, har kun en lille eller ubetydelig indvirkning på de fælles øjeblik størrelser af hofte og knæ under stance fase af at gå eller løbe.
Med hensyn til svingfasen gå, valget af inertiel model har en betydelig indvirkning på omfanget af nedre ende fælles kinetik. Under swing, er der ingen stor ydre kraft, som jorden udrykningsstyrke under holdning. Bevægelse af lemmer er meget mere afhængig af inertien i systemet og vekselvirkninger mellem segmenterne. Dette blev afspejlet af de store ændringer i joint kinetiske størrelser observeret, når to forskellige inerti modeller blev brugt i inverse dynamics analyse. Brug regressionsligninger baseret på intakt anatomi at modellere protese lemmer under swing, foreslog, at en større muskelarbejde var påkrævet, end når faktiske målte inertielle egenskaber protesen blev brugt.
Teknikken er beskrevet i dette dokument til direkte at måle inertien egenskaber af et under knæet protese har flere begrænsninger. Vi har beskrevet metoder ennd gjorde inerti ejendom målinger af benene kun for sagittalplan analyser. Forbedringer af dette system, omfatter oprettelse af et indre bur struktur, der kan blive suspenderet fra tre forskellige akser, så der kunne måles alle tre vigtigste øjeblikke af inerti. Desuden kan reaktionen bord teknik anvendes til alle tre planer til at måle den tredimensionelle placering af protesen massemidtpunktet. En anden forbedring, der kunne gøre skønnene over det tilbageværende lem masse anelse mere præcist ville være at bruge en volumetrisk vurdering som beskrevet af Czerniecki og kolleger 24, hvor det tilbageværende lem er suspenderet i en cylinder af vand at anslå dens volumen, mens en ensartet væv tæthed er anvendes til at estimere led masse. Desuden, i stedet for at bruge en formodet procentdel at fordele den samlede protese massen mellem protese sokkel og fod, hver protese kunne disarticulated ved anklen, således at hver komponent kan være weigheU uafhængigt af hinanden. En anden begrænsning af vores teknik er, at det kræver lidt ekstra tid i løbet af en eksperimentel session. I almindelighed vil ved hjælp af vores teknik til direkte at måle protesen inerti sandsynligvis tilsættes 30 min til den samlede tid, der kræves for en samling data session.
På grund af vores lille prøve af under knæet proteser med lignende design (dvs. lås og pin suspensioner og dynamisk elastisk respons proteser fod), udvikle endelige anbefalinger for estimering inertielle egenskaber under knæet proteser som simple procentdele af intakte lem inerti egenskaber er problematisk . Ikke desto mindre, at kombinere vores resultater med inerti skøn for under-knæproteser fra andre studier 20,21,23 og sammenligne disse resultater til inerti skøn for intakte lemmer, bliver nogle konsekvente tendenser tilsyneladende. Sammenlignet med det intakte led, massen af den prostetiske side er konsekvent 30-40% mindre, COM placering er 25-35% ctaber til knæleddet, og MOI er 50-60% mindre om en tværgående akse gennem knæleddet.
Som konklusion vil bruge regressionsligninger for en intakt skaft og fod til at modellere inertien egenskaber af et under knæet protese påvirke omfanget af fælles kinetiske skøn under swing, men kun vil have en lille eller minimal indflydelse på disse størrelser under holdning. Således for forskerne kun at fokusere på den holdning fase af bevægelse ved hjælp af inerti egenskaber af den intakte lemmer for at modellere protese side vil sandsynligvis ikke ændre konklusionerne af undersøgelsen. Men for dem er interesseret i svingfasen kinetik bør overvejes direkte foranstaltninger af protesen inerti egenskaber til at undgå fortegne de sande dynamik benprotese swing.
Bilag A
Pålidelighed og gyldighed af Moment of Inertia og massemidtpunkt Skøn
For at vurdere pålideligheden og validity af vores eksperimentelle målinger af protesen inertimoment og massemidtpunkt sted blev to simple eksperimenter udført. I det første eksperiment blev inertimomenter og massemidtpunkt placeringer af fire objekter eksperimentelt anslået i tre separate forsøg. De fire objekter var: 1) 9 x 9 x 61 cm blok af behandlet træ (masse = 2,8 kg), 2) 9 x 9 x 64 cm blok af ubehandlet træ (masse = 2,5 kg), 3) 7 x 9 x 65 cm blok af ubehandlet træ (masse = 1,8 kg) og 4) 61 cm langt stykke PVC-rør med og indvendig diameter på 8 cm og en udvendig diameter på 9 cm (masse = 0,8 kg). En svingning teknik 12 blev anvendt til at estimere hvert objekts Inertimomentet om en tværgående akse gennem dens centrum masse. Når et objekt svinger omkring en fast akse, svingningsperioden (τ) af objektet er proportional med objektets Inertimomentet om at faste akse. Hvis svingningsamplituden er mindre end 5 ° i forhold til en neutral position,inertimoment af objektet kan estimeres ud fra bevægelsen af et simpelt pendul:
 (A.1)
(A.1)
hvor I-aksen er inertimomentet i forhold til svingningsaksen, m er massen af systemet, g er tyngdeaccelerationen, og d er afstanden mellem svingningsaksen og centrum af massen af systemet.
En reaktion bord teknik blev anvendt til at estimere hvert objekts massemidtpunkt placering. Statisk ligevægt blev antaget (Σ øjeblikke = 0) og de øjeblikke, der er fremstillet med vægten af det objekt, blev vægten af rammen, og reaktionskraft summeres omkring en fast referenceakse. Inertimoment og massemidtpunkt placering af hvert objekt blev også estimeret baseret på simple geometriske ligninger. Vores eksperimentelle foranstaltninger blev sammenlignet med disse geometrisk estimations til at vurdere gyldigheden. Pålideligheden af vores estimater for massemidtpunkt placering og inertimoment blev vurderet ved hjælp af to (en for COM estimering og en til MOI skøn), enkelt faktor generelle lineære model ANOVAs, med 3 gentagne foranstaltninger, der afspejler de tre forsøg. Intraclass korrelationskoefficienter (ICCS), blev også beregnet til at bestemme gentagelsesnøjagtighed på vores skøn.
I et andet eksperiment, vurderede vi pålideligheden af vores svingningsperiode (τ) måling. τ blev målt til 10 på hinanden følgende forsøg med kun aluminiumsramme suspenderet fra svingning-aksen og 10 på hinanden følgende forsøg med en træklods (masse = 2,8 kg, = 9 x 9 x 61 cm) fastgjort i aluminiumsramme og begge suspenderet fra svingning akse. Under hver afprøvning blev τ målt for 10 på hinanden følgende svingninger ved hjælp af en fotocelle, hvis udgangsspænding varieres baseret på det reflekterede lys intensitet. Pålideligheden af vores målinger for τ var enssessed ved hjælp af fire, enkelt faktor generelle lineære model ANOVAs, med 10 gentagne målinger. To (én for ramme kun forsøg og en til stel + blok forsøg) ANOVAs blev anvendt til at bestemme, om τ afveg mellem på hinanden følgende svingninger (dvs. datamatrix var setup, så den faktor var perioder med svingning i træk inden for en given prøve). Derefter datamatricer blev roteret 90 °, så den faktor var på hinanden følgende forsøg, og to flere ANOVAs blev brugt til at bestemme, om τ afveg tværs hinanden følgende forsøg. Intraclass korrelationskoefficienter (ICCS), blev også beregnet til at bestemme gentagelsesnøjagtighed af vores målinger.
Resultater af Eksperiment 1 – De fire objekter
Hver objektets Inertimomentet om en tværgående akse gennem dens centrum af massen (I_obj_cm) blev konsekvent overvurderet (med ~ 5% for træklodser og ~ 12% for PVC-rør) i forhold til de skøn er baseret på hver objectR17 s masse og geometri (Iz) (tabel 3). Vores skøn, dog var yderst pålidelige. Der var ingen forskel i den gennemsnitlige inertimoment (F 2,6 = 0,154, p = 0,861) for de fire objekter på tværs af de tre forsøg. Desuden ICC'er afslørede, at på tværs af forsøg med vores inertimoment vurdering var meget repeterbare (ICC = 1,00). Selv om vores skøn tendens til at overvurdere objektets inertimoment i forhold til den geometriske estimat vores skøn var pålidelige.
Vores tyngdepunkt placering estimering ved hjælp af en reaktion board teknik var i overensstemmelse med estimationer baseret på antagelsen af ensartet densitet og en geometrisk model. Forskelle var mindre end 1%. Der var ingen forskel i den gennemsnitlige massemidtpunkt placering (F 2,6 = 1,126, p = 0,384) for de fire objekter på tværs af de tre forsøg. Desuden afslørede ICC'er at tværs forsøg med vores massemidtpunkt vurdering var meget repeterbare (ICC> 0,99). Såledesvores center af masse skøn var gyldige og pålidelige.

.. Tabel 3 Vores eksperimentelle skøn over øjeblikke af inerti og centrum af masse steder for de fire objekter i forhold til skøn baseret på masse og geometri af hvert objekt Klik her for at få et forstørret billede af bordet. Variable definitioner: mframe = massen af aluminiumsramme; mobject = massen af objektet; t_frame = svingningsperiode kun rammen; svingningsperiode blev bestemt som gennemsnittet af 10 på hinanden følgende svingninger og på tværs af tre på hinanden følgende forsøg. t_object = svingningsperiode af stel og objekt sammen; bestemmes det samme som t_frame; I_Frame_osc = I af rammen i forhold til svingningsaksen;I_Frame_obj_osc = I rammen plus objektet i forhold til svingningsaksen; I_obj_osc = I objektet i forhold til svingningsaksen; I_obj_cm = I af objektet omkring en akse gennem objektets tyngdepunkt; Iz = Teoretisk forudsigelse af jeg om objektets CM ved hjælp af følgende geometriske forudsigelse ligninger:
PVC: ![]() ; hvor R var ydre radius, r var indre radius, og h var længde
; hvor R var ydre radius, r var indre radius, og h var længde
Træ: ![]() ; hvor a er længden og b er bredden Geometrisk CM placering blev forudsagt som 50% af objektet længde.
; hvor a er længden og b er bredden Geometrisk CM placering blev forudsagt som 50% af objektet længde.
Resultater af Forsøg 2 – svingningsperiode (τ) Vurdering
Når aluminiumsramme alene blev suspenderet fra svingningsaksen og svingede, τ konsekvent og systematisk faldet (F 9,81 = 123,25, p <0,001) i løbet af de første 10 oscilninger med ca 6 millisekunder for alle 10 svingning forsøg (figur 5; venstre panel). På tværs af studierne var den gennemsnitlige svingningsperiode også fundet at afvige væsentligt (F 9,81 = 13,97, p <0,001), når kun rammen blev svinget. ICC viste imidlertid, at der inden for en given retssag systematisk fald i τ løbet af de første 10 svingninger var reproducerbar (ICC = 0,99). Når rammen og træklods (m = 2797 g) blev svunget sammen, havde τ ikke ændres i løbet af de første 10 svingninger (F 9,81 = 3,031, p = 0,116), og det gennemsnitlige τ over 10 på hinanden følgende forsøg var ikke signifikant forskellig ( F 9,81 = 3,533, p = 0,093) (Figur 5, højre panel). ICC for rammen plus objekt forsøg tyder på, at inden for en given retssag τ er ikke gentagelig fra svingning til oscillation (ICC = 0,17). Disse data tyder på, at for rammen kun forsøg τ er bedre estimeret som et gennemsnit af den første svingning i en række af tri als og at når et objekt med egenskaber svarende til et under knæet protese svinget, er τ bedre estimeret som gennemsnittet på tværs af hinanden følgende svingninger og på tværs af en række forsøg.
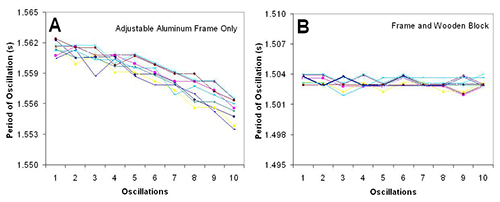
Figur 5.. Svingningsperiode målt for (A) aluminiumsramme kun og (B) ramme og træklods (blok masse = 2,8 kg, blok dimensioner = 9 x 9 x 61 cm). Hvert panel viser 10 separate forsøg med de første 10 svingninger af hvert forsøg vises. Med kun rammen suspenderet fra svingningerne akse (venstre panel), τ faldt systematisk over de første 10 svingninger. Men når en træklods blev tilføjet til rammen, τ ikke systematisk varierer på tværs af de første 10 svingninger (højre panel).
Følsomhed af Moment of Inertia til svingningsperiode
t "> Fordi resultaterne fra eksperiment 1 tyder vore vurderinger af et objekts inertimoment er konsekvent overvurderet og resultaterne fra eksperiment 2 tyder på, at τ af rammen falder over de første 10 svingninger, vi udførte en følsomhedsanalyse for at bestemme den bedste metode til at kvantificere . τ for rammen kun forsøg og ramme plus objekt forsøg (tabel 4) τ er direkte proportional med inertimomentet af et objekt: (A.2)
(A.2)
hvor I-aksen er inertimomentet i forhold til svingningsaksen, m er massen af systemet, g er tyngdeaccelerationen, og d er afstanden mellem svingningsaksen og centrum af massen af systemet. Derfor, hvis τ falder, så det gør jeg akse fordi m, g, og d er konstanter inden for en given retssag. Da vi estimate inertimomentet af et objekt som:
Jeg obj = Jeg obj + ramme – Hvis Rame (A.3)
undervurderer inertimoment af rammen (I ramme) vil producere en større inertimoment skøn for objekt (jeg obj), der er i overensstemmelse med vores skøn i eksperiment 1.. Figur 6 viser τ fra eksperiment 1 for både den eneste ramme forsøg og ramme plus objekt forsøg for den letteste objekt og tungeste objekt. Denne figur illustrerer, at for tunge genstande (fx under knæet protese) er der ingen tydelig nedgang i τ løbet af de første 10 svingninger, men for lettere genstande er der en svag systematisk fald i τ.

Tabel 4. Sammenligning affire forskellige metoder til bestemmelse svingningsperiode. Objektet anvendt i denne analyse var 9 x 9 x 61 cm blok af behandlet træ. Condition C producerede det bedste skøn over objektets inertimoment i forhold til en alternativ teoretisk skøn baseret på objektets masse og geometri. Klik her for at få et forstørret billede af bordet. Bemærkninger: Variable definitioner er de samme som tabel 3 betingelse. A: t_frame og t_object blev beregnet som den gennemsnitlige svingningsperiode af 10 på hinanden følgende svingninger på tværs af 3 forsøg Betingelse B:. blev t_frame og t_object beregnet som gennemsnittet af den første periode af svingning på tværs af 3 separate forsøg Condition C:. t_frame blev bestemt som i betingelse B; t_object blev bestemt som i Tilstand A. Betingelse D: t_frame blev bestemt som iBetingelse A; t_object blev bestemt som i betingelse B.
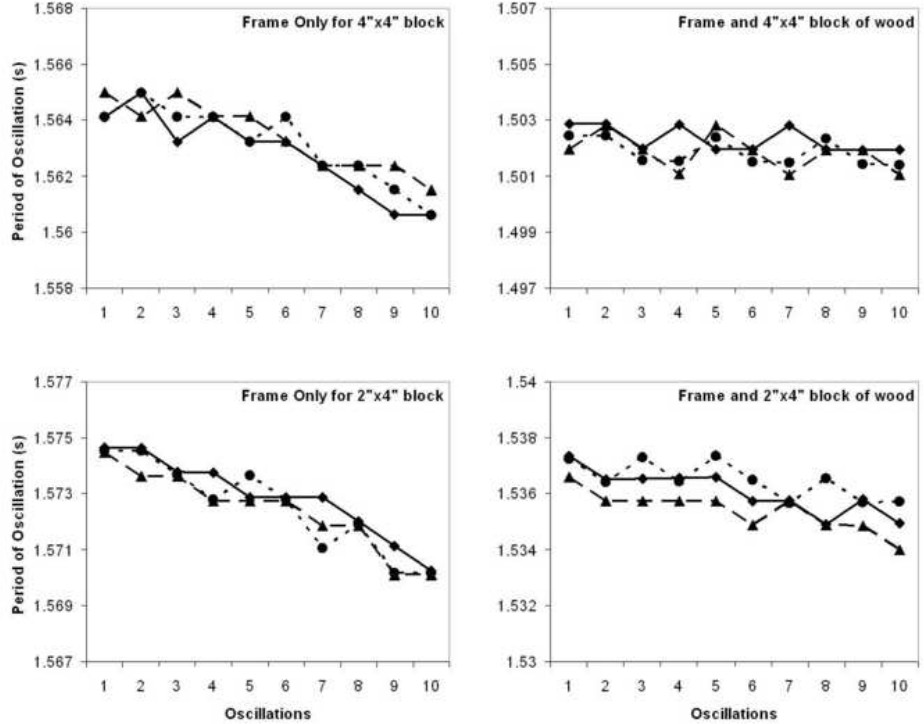
Figur 6.. Perioder oscillation for den tungeste og letteste genstande. De venstre paneler viser de første 10 perioder svingning tre forsøg til kun rammen, og de rigtige paneler vise den samme for rammen plus objekt forsøg. Som i forsøg 2 er en systematisk fald i τ løbet af de første 10 svingninger, når kun en ramme oscilleres. Når den tunge objekt blev svinget (m = 2,797 kg), var der ingen systematisk fald i τ. Imidlertid blev et mindre fald i τ observeret, når lyset objekt (m = 0,716 kg) blev svinget. Typisk under-knæprotese masse er blevet rapporteret at variere fra 1,2 til 2,1 kg 20,21. Selv for de letteste vægt proteser, bør ikke τudviser et betydeligt fald i løbet af de første 10 svingninger.
Konklusion
Når aluminiumsramme alene oscilleres vil svingningsperioden bestemmes som gennemsnittet af den første svingning fra 10 svingning forsøg. Når aluminiumsramme og protese oscilleres vil svingningsperioden bestemmes som middelværdien af 30 svingninger (3 forsøg, 10 på hinanden følgende svingninger inden for hvert forsøg).
