Percutaneous विद्युत तंत्रिका उत्तेजना व्यापक रूप से neuromuscular समारोह 1 आकलन करने के लिए प्रयोग किया जाता है। बुनियादी सिद्धांत एक मांसपेशियों में संकुचन पैदा करने के लिए एक परिधीय मोटर तंत्रिका के लिए एक बिजली के प्रोत्साहन उत्प्रेरण के होते हैं। मैकेनिकल (टोक़ माप) और electrophysiological (electromyographic गतिविधि) प्रतिक्रियाओं के एक साथ दर्ज हैं। माना संयुक्त पर दर्ज की गई टोक़, एक ergometer का उपयोग कर मूल्यांकन किया है। सतह इलेक्ट्रोड का उपयोग कर दर्ज electromyographic (ईएमजी) संकेत पेशी 2 की गतिविधि का प्रतिनिधित्व करने के लिए प्रदर्शन किया गया है। इस गैर इनवेसिव विधि दर्दनाक और अधिक आसानी से इंट्रामस्क्युलर रिकॉर्डिंग से लागू नहीं किया है। दोनों Monopolar और द्विध्रुवी इलेक्ट्रोड का इस्तेमाल किया जा सकता है। Monopolar इलेक्ट्रोड विन्यास छोटे मांसपेशियों के लिए उपयोगी हो सकता है, जो मांसपेशियों की गतिविधि 3 में परिवर्तन, के लिए अधिक संवेदनशील होना दिखाया गया है। हालांकि, द्विध्रुवी इलेक्ट्रोड संकेत करने वाली शोर आर में सुधार लाने में अधिक प्रभावी होना दिखाया गया हैAtio 4 और सबसे अधिक रिकॉर्डिंग और मोटर इकाई गतिविधि को बढ़ाता की एक विधि के रूप में इस्तेमाल कर रहे हैं। नीचे वर्णित कार्यप्रणाली द्विध्रुवी रिकॉर्डिंग पर ध्यान दिया जाएगा। ईएमजी गतिविधि neuromuscular प्रणाली की प्रभावकारिता और अखंडता का सूचक है। पर्क्यूटेनियस तंत्रिका उत्तेजना का उपयोग neuromuscular समारोह में आगे अंतर्दृष्टि, मांसपेशियों में रीढ़ की हड्डी, या सुप्रा रीढ़ की हड्डी के स्तर (चित्रा 1) में यानी परिवर्तन प्रदान करता है।
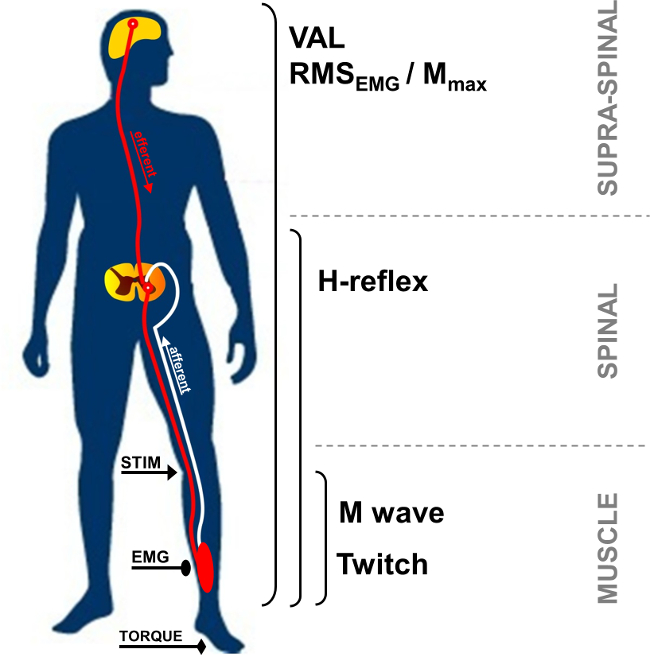
चित्रा 1:। न्यूरोमस्कुलर माप का अवलोकन STIM: तंत्रिका उत्तेजना। ईएमजी: Electromyography। वैल: स्वैच्छिक सक्रियण के स्तर। आरएमएस: रूट स्क्वायर मतलब। एम अधिकतम: अधिकतम एम लहर आयाम।
बाकी में भी, एम-लहर बुलाया यौगिक मांसपेशी संभावित कार्रवाई, प्रोत्साहन मूर्ति के बाद मनाया कम विलंबता प्रतिक्रिया है, और प्रत्यक्ष activ द्वारा उत्तेजनीय मांसपेशियों का प्रतिनिधित्व करता है मांसपेशी (चित्रा 2, 3 नंबर) के लिए अग्रणी मोटर axons की समझना। एम लहर आयाम इसका अधिक से अधिक मूल्य का एक पठार तक पहुँचने तक तीव्रता के साथ बढ़ जाती है। एम मैक्स नामक यह प्रतिक्रिया, सतह EMG इलेक्ट्रोड 5 के तहत दर्ज की गई सभी मोटर इकाइयों और / या मांसपेशी फाइबर कार्रवाई की क्षमता के तुल्यकालिक योग का प्रतिनिधित्व करता है। चोटी से शिखर आयाम या लहर क्षेत्र के विकास neuromuscular संचरण 6 के परिवर्तन की पहचान के लिए प्रयोग किया जाता है। एम-लहर, यानी चोटी चिकोटी टोक़ / बल के साथ जुड़े यांत्रिक प्रतिक्रियाओं में परिवर्तन की वजह से मांसपेशियों उत्तेजना और / या मांसपेशी फाइबर 7 भीतर में परिवर्तन करने के लिए हो सकता है। एम अधिकतम आयाम और शिखर चिकोटी टोक़ आयाम (पं / एम अनुपात) की एसोसिएशन यानी एक दिया विद्युत मोटर आदेश के लिए यांत्रिक प्रतिक्रिया पेशी 8 की विद्युत क्षमता, की एक सूची प्रदान करता है।
52,974 / 52974fig2.jpg "/>
चित्रा 2:। मोटर और तंत्रिका उत्तेजना से सक्रिय कर्मकर्त्ता रास्ते एक मिश्रित (मोटर / संवेदी) तंत्रिका (STIM) की बिजली की उत्तेजना मोटर अक्षतंतु और आइए अभिवाही गोलीबारी दोनों का एक विध्रुवण लाती है। रीढ़ की हड्डी के बदले में एक एच पलटा प्रतिक्रिया (मार्ग 1 + 2 + 3) उदाहरण भी देते हैं, जो एक अल्फा motoneuron, को सक्रिय करने की दिशा में आइए के विध्रुवण afferents। एम लहर (मार्ग) 3: उत्तेजना तीव्रता पर निर्भर करता है, मोटर अक्षतंतु विध्रुवण एक सीधा पेशी प्रतिक्रिया उदाहरण भी देते हैं। अधिक से अधिक एम लहर तीव्रता में एक antidromic मौजूदा भी (3 ') उत्पन्न होता है और पलटा वॉली (2) के साथ टकराया। इस टक्कर आंशिक रूप से या पूरी तरह से एच-पलटा प्रतिक्रिया रद्द।
एच-पलटा आइए-α motoneuron अन्तर्ग्रथन 9 में परिवर्तन का आकलन करने के लिए इस्तेमाल एक electrophysiological प्रतिक्रिया है। यह पैरामीटर आराम से कम या स्वैच्छिक संकुचन के दौरान मूल्यांकन किया जा सकता है। एच-पलटा खिंचाव पलटा के एक संस्करण का प्रतिनिधित्व करता है (चित्रा 2, नूmber 1-3)। एच-पलटा monosynaptically आइए अभिवाही रास्ते 10,11 द्वारा भर्ती मोटर इकाइयों को सक्रिय करता है, और परिधीय और केंद्रीय प्रभावों 12 के अधीन किया जा सकता है। एक एच पलटा evoking की विधि बाकी 13,14 पर और सममितीय संकुचन के दौरान 15 रीढ़ की उत्तेजना का आकलन करने के लिए एक उच्च इंट्रा-विषय विश्वसनीयता के लिए जाना जाता है।
एक स्वैच्छिक संकुचन के दौरान, स्वैच्छिक तंत्रिका ड्राइव की भयावहता को आम तौर पर रूट मतलब वर्ग का उपयोग मात्रा, ईएमजी संकेत के आयाम का उपयोग कर मूल्यांकन किया जा सकता है (आरएमएस)। आरएमएस ईएमजी सामान्यतः स्वैच्छिक संकुचन (चित्रा 1) के दौरान मोटर प्रणाली की उत्तेजना का स्तर बढ़ाता का एक साधन प्रयोग किया जाता है। क्योंकि अंतर और अंतर-विषय परिवर्तनशीलता 16 वर्ष की, आरएमएस ईएमजी एक मांसपेशी विशेष अधिक से अधिक स्वैच्छिक संकुचन (आरएमएस EMGmax) के दौरान दर्ज की गई ईएमजी का उपयोग कर सामान्य हो गया है। इसके अलावा, क्योंकि ईएमजी संकेत में परिवर्तन ख सकता हैऐसे एम-लहर के रूप में एक परिधीय पैरामीटर का उपयोग परिधीय स्तर, सामान्य बनाने में परिवर्तन के कारण ई ईएमजी संकेत के ही केंद्रीय घटक का आकलन करने के लिए आवश्यक है। यह अधिक से अधिक आयाम या एम-लहर की आरएमएस Mmax द्वारा आरएमएस ईएमजी विभाजित करके किया जा सकता है। आरएमएस Mmax का उपयोग कर सामान्यीकरण यह ध्यान में एम-लहर अवधि 17 वर्ष की संभावित बदलाव के रूप में लेता पसंदीदा तरीका है (यानी ईएमजी / आरएमएस Mmax आरएमएस)।
मोटर आदेशों भी स्वैच्छिक सक्रियण स्तर (वीएएल) की गणना के द्वारा मूल्यांकन किया जा सकता है। इस पद्धति का एक अधिक से अधिक स्वैच्छिक संकुचन के दौरान एम अधिकतम तीव्रता में एक बिजली की उत्तेजना superimposing द्वारा चिकोटी प्रक्षेप तकनीक 18 का उपयोग करता है। तंत्रिका उत्तेजक द्वारा प्रेरित अतिरिक्त टोक़ एक सुकून potentiated पेशी 19 में समान तंत्रिका उत्तेजना द्वारा उत्पादित एक नियंत्रण चिकोटी की तुलना में है। अधिक से अधिक वैल, मूल चिकोटी interpo मूल्यांकन करने के लिएमर्टन 18 से वर्णित आबादी तकनीक एक स्वैच्छिक संकुचन से अधिक interpolated एक भी प्रोत्साहन शामिल है। पैदा टोक़ वेतन वृद्धि एकल उत्तेजना प्रतिक्रियाओं 20 की तुलना में बड़ा और अधिक आसानी से पता लगाया है, और कम चर रहे हैं, क्योंकि हाल ही में, बनती उत्तेजना का उपयोग अधिक लोकप्रिय हो गया है। वैल काम की मांसपेशियों 21 ज़्यादा से ज़्यादा सक्रिय करने के लिए केंद्रीय तंत्रिका तंत्र की क्षमता की एक सूची प्रदान करता है। वर्तमान में, वैल चिकोटी प्रक्षेप तकनीक का उपयोग मांसपेशी सक्रियण 22 के स्तर का आकलन करने का सबसे मूल्यवान तरीका है का मूल्यांकन किया। इसके अलावा, एक ergometer उपयोग मूल्यांकन चोटी टोक़ अनुसंधान और नैदानिक सेटिंग 23 में उपयोग के लागू सबसे ठीक से अध्ययन किया शक्ति परीक्षण पैरामीटर है।
विद्युत तंत्रिका उत्तेजना मांसपेशी समूहों (जैसे कोहनी flexors, कलाई flexors, घुटने extensors, तल का flexors) की एक किस्म में इस्तेमाल किया जा सकता है। हालांकि, तंत्रिका पहुंच बनाता हैकुछ समूहों की मांसपेशियों में मुश्किल तकनीक। तल का flexor मांसपेशियों, विशेष रूप से ट्राइसेप्स surae (soleus और gastrocnemii) मांसपेशियों, अक्सर साहित्य 24 में जांच कर रहे हैं। दरअसल, इन मांसपेशियों को उनकी विशेष रुचि को न्यायोचित ठहरा, हरकत में शामिल कर रहे हैं। उत्तेजना साइट और रिकॉर्डिंग इलेक्ट्रोड के बीच की दूरी ट्राइसेप्स surae मांसपेशियों के विभिन्न पैदा की तरंगों की पहचान के लिए अनुमति देता है। घुटने की चक्की खात में पीछे tibial तंत्रिका की सतही हिस्सा है और स्पिंडल की बड़ी संख्या के लिए यह आसान अन्य मांसपेशियों 24 की तुलना में पलटा प्रतिक्रियाओं को रिकॉर्ड करने के लिए बनाते हैं। इन कारणों के लिए, वर्तमान में प्रस्तुत पलटा कार्यप्रणाली की मांसपेशियों की ट्राइसेप्स surae समूह (soleus और gastrocnemius) पर केंद्रित है। इस प्रोटोकॉल का उद्देश्य ट्राइसेप्स surae में neuromuscular समारोह की जांच करने के लिए पर्क्यूटेनियस तंत्रिका उत्तेजना तकनीक का वर्णन करने के लिए इसलिए है।
