Kunstmatige zintuiglijke feedback (ASF) kan worden gedefinieerd als het gebruik van real-time biologische informatie aan individuen, vaak compenseren gecompromitteerd proprioceptie of andere zintuiglijke mechanisme. ASF is al lang gebruikt op het gebied van revalidatie van gewonde of personen met een handicap te helpen bij het herstellen van de aspecten van de fysieke functie en beweging 1-3, waardoor individuen om fysische processen die ooit een onwillekeurige reactie van het autonome zenuwstelsel 4 waren onder controle. Een subcategorie van ASF, biomechanische biofeedback, maakt gebruik van externe sensoren om parameters met betrekking tot evenwicht of gait kinematica meten en communiceren van deze informatie aan het individu door middel van een soort van toegepaste stimulus. Een steeds populairder benadering biomechanische feedback telt kleine trilmotoren of magneetschakelaar, geplaatst op verschillende lichaamsdelen ruimtelijke en temporele feedback. Vorige literatuur p toondenromising resultaten die het gebruik van vibrotactiele feedback in toepassingen aan personen met een lagere ledematen amputaties, vestibulaire stoornissen, en veroudering gerelateerde verlies van evenwicht 5-9.
Een goed begrip van de mechanismen die individuele perceptie en de reactie op specifieke stimuli noodzakelijk voor het informeren effectieve implementatie van ASF voor verschillende toepassingen. Voor vibrotactiele feedback, leider onder deze mechanismen proprioceptie en de sensorimotorische respons, specifiek de gebruiker gevoeligheid voor de toegepaste trillingen en de tijd die nodig is om de gewenste reactie uit te voeren. Elke sensorische informatie verstrekt via trillingen stimuli worden gecodeerd als specifieke combinaties van vibratie frequentie, amplitude, locatie en sequentie. Daarom moet het ontwerp van vibrotactiele ASF systemen combinaties van parameters te selecteren om de perceptie gebruiker en interpretatie van de stimuli te maximaliseren, zoalsen de tijdigheid en nauwkeurigheid van de resulterende motorische respons. Het doel van dit protocol is een platform om reactietijden en nauwkeurigheid reactie op verschillende stimuli vibrationele evalueren om het ontwerp van systemen ASF hoogte voor gebruik met verschillende sensorische verminderde bevolkingen.
De hier beschreven methoden gebaseerd op eerder onderzoek verkennen menselijke waarneming van tactiele feedback en vibrotactiele 3,5,6, en is ontwikkeld voor gebruik in twee eerdere studies 10,11. De laatste twee studies gebruikt dit protocol om de effecten van trillingsfrequentie en op de nauwkeurigheid en actualiteit van gebruikerreacties in de onderste ledematen amputatie onderzoeken blijkt dat beide parameters significante invloed op de uitkomst maatregelen, en dat een hoge mate van nauwkeurigheid te kunnen reageren bereikt. Deze resultaten kunnen worden gebruikt om de ideale plaatsing van magneetschakelaar informeren toekomstige studies en klinische toepassingen van vibrotactiele ASF systemen. Ander recent werk vanCrea et al. 12 onderzocht gebruiker gevoeligheid voor veranderingen in vibratie patronen aangebracht op de dij gedurende het lopen, via verbale reacties op waargenomen veranderingen in de vibratie patronen in plaats van een motorische respons betekenen. Hoewel deze verbale reacties kunnen worden gebruikt om detectie nauwkeurigheid meten ze geen rekening met vertragingen en fouten die in de motorbesturing proces kan zijn.
De primaire opstelling voor de volgende experimenten uit een aantal trilmotoren verbonden puls-breedte gemoduleerde output pinnen van een microcontroller board. Het bestuur is op zijn beurt gecontroleerd door middel van een Universal Serial Bus (USB) aansluiting op een computer met in de handel verkrijgbare systeemontwerp software. De motoren vereisen een extra versterkingschakeling om voldoende spanning te waarborgen en stroom wordt toegevoerd over een groot bereik van trillingsfrequenties. Een voorbeeld versterkerschakeling figuur 1. De bipolaire transistor (BJR) In de figuur kan worden vervangen door kleinere metaal-oxide-halfgeleider veldeffecttransistor (MOSFET) voor een efficiëntere werking en een kleiner formaat. Evenzo kan de gehele versterkerschakeling worden vervangen door een off-the-shelf haptische aandrijver extra en lagere grootte. Elke motor vereist een eigen circuit en met de in dit artikel vermelde apparatuur, tot tien motoren kunnen worden bediend met één microcontrollerbordje.
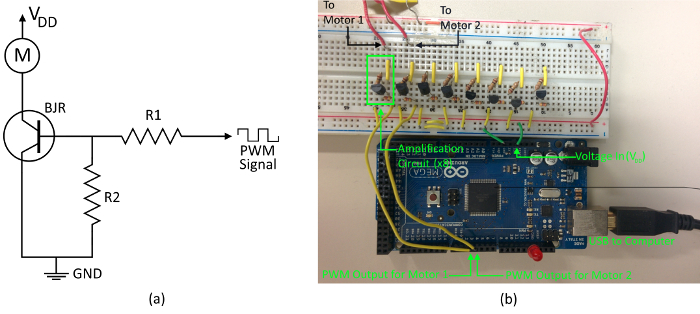
Figuur 1. motorbedrading. (A) Het versterkingscircuit voor een vibratiemotor weergegeven. Elke motor is een apart circuit en moet worden aangesloten op een unieke PWM-uitgang van de microcontroller. De V DD hier staat voor de 3.3 V macht door de microcontroller raad van bestuur, en voor de weerstand R2 dient als een pull-down resister aan de transistor switch te garanderen blijft open wanneer nul spanning appgelogen. (B) Een voorbeeld van de fysieke bedrading van twee motoren. Hoewel acht afzonderlijke amplificatie circuits getoond, slechts twee zijn verbonden trilmotoren. In dit protocol R1 = 4,7 kOhm en R2 = 100 kOhm. Klik hier om een grotere versie van deze figuur te bekijken.
