rétroaction sensorielle artificielle (ASF) peut être définie comme la pratique de fournir en temps réel des informations biologiques à des individus, souvent compenser proprioception compromis ou un autre mécanisme sensoriel. ASF a été longtemps utilisé dans le domaine de la réadaptation des personnes blessées ou handicapées pour aider à la récupération des aspects de la fonction physique et de mouvement : 1 – 3, ce qui permet aux individus de contrôler les processus physiques qui étaient autrefois une réaction involontaire du système nerveux autonome 4. Une sous-catégorie de ASF, biofeedback biomécanique, utilise des capteurs externes pour mesurer les paramètres relatifs à l'équilibre ou la marche cinématique, et de communiquer ces informations à l'individu par une sorte de stimulus appliqué. Une approche de plus en plus populaire pour la rétroaction biomécanique emploie de petits moteurs vibrants, ou contacteurs, placés à différentes parties du corps pour fournir l'espace ainsi que la rétroaction temporelle. la littérature antérieure a montré promising résultats favorisant l'utilisation des évaluations vibrotactile dans des applications à des personnes ayant subi une amputation des membres inférieurs, troubles vestibulaires, et le vieillissement-connexe perte d'équilibre 5-9.
Une compréhension approfondie des mécanismes de contrôle de la perception et de la réponse d'un individu à des stimuli spécifiques est nécessaire pour informer la mise en œuvre efficace des systèmes d'ASF pour différentes applications. Pour la rétroaction vibrotactile, chef parmi ces mécanismes sont proprioception et la réponse sensorimotrice, en particulier l'utilisateur sensibilité aux vibrations appliquées et le temps requis pour exécuter la réaction souhaitée. Toute information sensorielle communiquée par des stimuli de vibration doit être codé comme des combinaisons spécifiques de fréquence de vibration, l'amplitude, l'emplacement et la séquence. Par conséquent, la conception de systèmes d'ASF vibrotactiles devrait choisir des combinaisons de paramètres afin de maximiser la perception et l'interprétation de l'utilisateur des stimuli, commeainsi que la rapidité et la précision de la réponse du moteur résultant. L'objectif de ce protocole est de fournir une plate-forme à partir de laquelle pour évaluer les temps de réponse et la précision de la réponse à divers stimuli vibratoires pour éclairer la conception des systèmes d'ASF pour une utilisation avec différentes populations sensorielles avec facultés affaiblies.
Les méthodes décrites ici construit sur la recherche avant d' explorer la perception humaine du tactile et vibrotactile rétroaction 3,5,6, et a été développé pour une utilisation dans deux études antérieures 10,11. Les deux dernières études utilisées ce protocole pour examiner les effets de la fréquence de vibration et l'emplacement sur la précision et la rapidité des réponses des utilisateurs dans amputés des membres inférieurs, montrant que les deux paramètres affectent de manière significative les mesures de résultats, et qu'un haut degré de précision de réponse peuvent être atteint. Ces résultats peuvent être utilisés pour informer le placement idéal des contacteurs dans les études futures et les applications cliniques des systèmes vibrotactile ASF. D'autres travaux récents parCréa et al. 12 a examiné la sensibilité des utilisateurs aux changements dans les modes de vibrations appliquées à la cuisse lors de la marche, en utilisant des réponses verbales pour signifier les changements perçus aux modes de vibration, plutôt que d' une réponse motrice. Bien que ces réponses verbales peuvent être utilisées pour mesurer la précision de détection, ils ne tiennent pas compte des erreurs et des retards qui peuvent être présents dans le processus de commande du moteur.
La configuration principale pour les expériences suivantes se compose d'un certain nombre de moteurs vibrants reliés à largeur d'impulsion modulée broches de sortie d'une carte de microcontrôleur. Le conseil d'administration est, à son tour, contrôlé par une connexion Universal Serial Bus (USB) à un ordinateur exécutant le logiciel disponible dans le commerce de la conception du système. Les moteurs ont besoin d'un circuit d'amplification supplémentaire pour assurer une tension suffisante, et le courant est fourni sur une large gamme de fréquences de vibration. Un circuit amplificateur est par exemple représenté sur la figure 1. Le transistor à jonction bipolaire (RJL) Dans la figure peut être remplacé par le transistor à effet de champ métal-oxyde inférieur-semiconducteur (MOSFET) pour un fonctionnement plus efficace et plus petite taille. De même, le circuit d'amplification entier peut être remplacé par un pilote de moteur haptique off-the-shelf pour fournir un contrôle supplémentaire et la taille réduite. Chaque moteur nécessite son propre circuit, et en utilisant l'équipement énuméré dans ce document, jusqu'à dix moteurs peut être contrôlé par une seule carte de microcontrôleur.
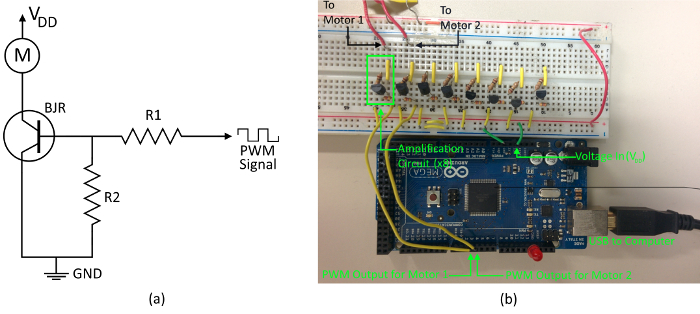
Figure 1. Le câblage du moteur. (A) Le circuit d'amplification pour un moteur de vibration unique est représenté. Chaque moteur exige un circuit séparé et il doit être connecté à un port de sortie PWM unique sur le microcontrôleur. Le V DD ici représente la puissance de 3,3 V fourni par le conseil de microcontrôleur, et la résistance R2 sert de resister pull-down pour assurer le commutateur à transistor reste ouvert lorsque la tension zéro est appmenti. (B) Un exemple de câblage physique des deux moteurs. Bien que huit circuits d'amplification individuels sont présentés, seuls deux sont reliés à des moteurs de vibration. Dans ce protocole R1 = 4,7 kQ et R2 = 100 kQ. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
