人工感覚フィードバック(ASF)は、しばしば妥協固有受容または他の感覚機構を補償する、個人にリアルタイムの生体情報を提供するの実践として定義することができます。個人が一度自律神経系4の無意識の反応であった物理過程を制御することを可能にする、3 – ASFは長い身体機能と運動1の側面の回復を支援するために負傷したまたは障害者のリハビリテーションの分野で使用されてきました。 ASF、生体力学的バイオフィードバックのサブカテゴリは、運動のバランスをとるか、歩行に関連するパラメータを測定し、印加された刺激のいくつかの並べ替えを介して個別にこの情報を通信するために外部センサを使用しています。生体力学的フィードバックにますます人気アプローチは、空間だけでなく、時間的なフィードバックを提供するために、身体のさまざまな部分に配置された、小さな振動モータ、またはtactorsを採用しています。前の文献は、pを示しています9 –下肢切断術、前庭障害、およびバランス5の老化関連の損失で個人への用途における振動触覚フィードバックの使用を支持するromising結果。
特定の刺激に個々の認識と応答を制御するメカニズムの完全な理解は、異なるアプリケーションのためのASFシステムの効果的な実施を通知するために必要です。振動触覚フィードバックのために、これらの機構のうち主に固有感覚及び感覚応答、特に適用される振動に対するユーザの感度および所望の反応を実行するのに必要な時間です。振動刺激を介して通信どれ感覚情報は、振動周波数、振幅、位置、および配列の特定の組合せとしてエンコードする必要があります。したがって、振動触覚ASFシステムの設計は、ユーザの知覚と刺激の解釈を最大化するためのパラメータの組み合わせを選択する必要がありますよく、得られた運動反応の適時性や正確性など。このプロトコルの目的は、異なる感覚障害集団で使用するためのASFシステムの設計を知らせるために、様々な振動刺激に対する応答時間と応答の精度を評価するためのプラットフォームを提供することです。
ここで説明する方法は、触覚や振動触覚フィードバック3,5,6の人間の知覚を探索前に研究に基づいて構築され、前の2つの研究10,11で使用するために開発されました。後者の二つの研究では、両方のパラメータが有意にアウトカム指標に影響を与えることを示し、下肢切断者の精度およびユーザ応答の適時上の振動数と位置の効果を調べるために、このプロトコルを採用し、応答を高精度であることができること達成しました。これらの結果は、今後の研究および振動触覚ASFシステムの臨床応用にtactorsの理想的な配置を通知するために使用することができます。による他の最近の研究クレアら 12は、知覚される振動パターンに変化はなく、モータの応答を意味する言葉の応答を用いて、歩行時に大腿部に適用される振動パターンの変化に対するユーザの感度を調べました。これらの言葉の応答が検出精度を測定するために使用することができるが、それらは、モータ制御処理中に存在し得るエラーや遅延を考慮していません。
以下の実験のための主要なセットアップは、パルス幅変調するためのマイクロコントローラボードの出力端子を接続し、振動モータの数で構成されています。基板は、次に、市販のシステム設計ソフトウェアを実行するコンピュータにユニバーサルシリアルバス(USB)接続を介して制御されます。モータは、十分な電圧を確保するために、追加の増幅回路を必要とし、現在の振動周波数の広い範囲にわたって供給されます。例えば増幅回路は、図1に示されている。バイポーラ接合トランジスタ(BJR)図に、より効率的な動作、より小さなサイズに小さい金属酸化膜半導体電界効果トランジスタ(MOSFET)で置き換えることができます。同様に、全体の増幅回路は、追加の制御及び小型化を提供するために、既製のハプティックモータドライバに置き換えることができます。各モータには、専用の回路を必要とし、10モータまで、この論文に記載されている機器を使用することは、単一のマイクロコントローラ・ボードによって制御することができます。
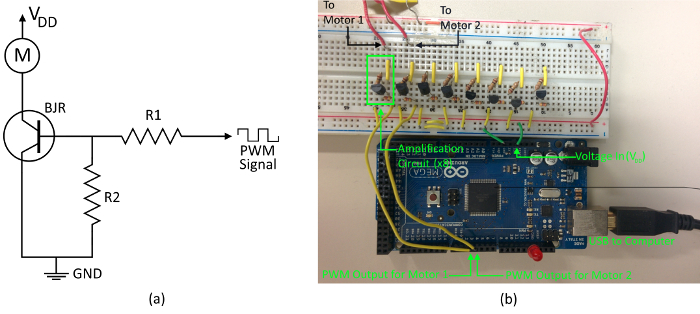
図1モータ配線(A)単一振動モータ用の増幅回路が示されています。各モータは別個の回路を必要とし、マイクロコントローラ上で一意のPWM出力ポートに接続する必要があります。ここで、V DDは、マイクロコントローラ・ボードから供給された3.3 V電源を表し、ゼロ電圧がアプリのときにトランジスタスイッチを確保するために、プルダウン抵抗が開いているように、抵抗R2が提供しています嘘をつきました。 (B)は、2つのモータの物理的な配線の例を示します。 8つの個別の増幅回路が示されているが、2つだけは、振動モータに接続されています。このプロトコルR1 = 4.7kΩのとR2 = 100kΩのでは。 この図の拡大版をご覧になるにはこちらをクリックしてください。
