Artificiell sensorisk återkoppling (ASF) kan definieras som praxis att ge realtid biologisk information till enskilda, ofta kompensera för nedsatt proprioception eller annan sensorisk mekanism. ASF har länge använts i området för rehabilitering av skadade eller funktionshindrade personer för att hjälpa till att återhämta sig aspekter av fysisk funktion och rörelse 1-3, så att människor kan styra fysikaliska processer som en gång var en ofrivillig reaktion av det autonoma nervsystemet 4. En underkategori av ASF, biomekanisk biofeedback använder externa sensorer för att mäta parametrar för balans eller gång kinematik, och vidarebefordra denna information till den enskilde genom någon form av tillämpad stimulans. En allt populärare metod för biomekaniska återkoppling använder små vibrerande motorer, eller tactors, placerade på olika delar av kroppen för att ge rumslig liksom tids återkoppling. Tidigare litteratur har visat promising resultat stöder användningen av vibrotaktila återkoppling i ansökningar till personer med lägre extremiteterna amputationer, vestibulära nedsättningar, och åldersrelaterad förlust av balans 5-9.
En grundlig förståelse av de mekanismer som styr en persons uppfattning och svar på specifika stimuli är nödvändig för att informera ett effektivt genomförande av ASF system för olika applikationer. För vibrotaktila feedback, främst bland dessa mekanismer är proprioceptionen och sensomotorisk svar specifikt användaren känslighet för de tillämpade vibrationerna och den tid som krävs för att utföra den önskade reaktionen. Alla sensorisk information kommuniceras genom vibrations stimuli måste kodas som specifika kombinationer av vibrationsfrekvensen, amplituden, plats och sekvens. Därför bör utformningen av vibrotaktila ASF system välja kombinationer av parametrar för att maximera användarens uppfattning och tolkning av stimuli, somsamt aktualitet och noggrannhet av den resulterande motorisk respons. Målet med detta protokoll är att tillhandahålla en plattform för att utvärdera svarstider och svarsnoggrannhet till olika vibrations stimuli för utformningen av ASF system för användning med olika sensoriska nedsatt populationer.
De metoder som beskrivs här bygger på tidigare forskning undersöker människans perception av taktil och vibrotaktila återkoppling 3,5,6, och har utvecklats för att användas i två tidigare studier 10,11. De senare två studier användes detta protokoll för att undersöka effekterna av vibrationsfrekvens och plats på noggrannhet och aktualitet användarsvar i nedre extremiteter amputerade, som visar att båda parametrarna påverka resultatet åtgärder som väsentligt, och att en hög grad av svars noggrannhet kan vara uppnått. Dessa resultat kan användas för att informera den ideala placeringen av tactors i framtida studier och kliniska tillämpningar av vibrotaktila ASF system. Andra senaste arbetetEt al. Crea 12 granskade användare känsligheten för förändringar i vibrationsmönster appliceras på låret under promenader, med hjälp av verbala svar att beteckna upplevda förändringar i vibrationsmönster, snarare än en motorisk respons. Medan dessa verbala svar kan användas för att mäta detekteringsnoggrannhet, de inte står för fel och förseningar som kan vara närvarande i motorstyrprocessen.
Den primära setup för följande experiment består av ett antal vibrerande motorer som är anslutna till pulsbreddmodulerade utgångsstift av en mikrokontroller ombord. Styrelsen är i sin tur styrs via en Universal Serial Bus (USB) anslutning till en dator som kör kommersiellt tillgängligt system design mjukvara. Motorerna kräva ytterligare förstärkningskrets för att säkerställa tillräcklig spänning och ström matas över ett brett område av vibrationsfrekvenser. Ett exempel förstärkarkrets visas i figur 1. Den bipolär transistor (BJR) I figuren kan ersättas med mindre metall-oxid-halvledarfälteffekttransistor (MOSFET) för mer effektiv drift och mindre storlek. På liknande sätt kan hela förstärkarkretsen ersättas av en off-the-shelf haptiska motor föraren att ge ytterligare kontroll och minskad storlek. Varje motor kräver sin egen krets, och med hjälp av utrustning som anges i detta dokument, upp till tio motorer kan styras av en enda mikro styrelse.
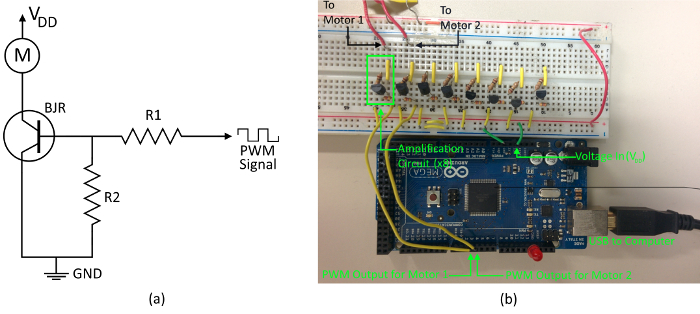
Figur 1. Motorkopplings. (A) Den förstärkningskrets för en enda vibrationsmotor är visad. Varje motor kräver en separat krets och måste vara ansluten till en unik PWM-utgången på mikrokontroller. V DD här representerar 3,3 V ström av mikrokortet och motståndet R2 fungerar som en pull-down resister att säkerställa transistoromkopplaren förblir öppen när noll spänning är ca.lied. (B) Ett exempel på det fysiska ledningar av två motorer. Även åtta individuella förstärkningskretsar visas, endast två är anslutna till vibrationsmotorer. I detta protokoll R1 = 4,7 kQ och R2 = 100 kQ. Klicka här för att se en större version av denna siffra.
