Yapay duyusal geribildirim (ASF) sık sık tehlikeye propriosepsiyon ya da diğer duyusal mekanizma telafi bireylere gerçek zamanlı biyolojik bilgi sağlama uygulama olarak tanımlanabilir. Bireylerin kez otonom sinir sistemi 4 istemsiz bir tepki vardı fiziksel süreçleri kontrol etmesini sağlayan, 3 – ASF uzun fiziksel fonksiyon ve hareket 1 yönlerini kurtarma yardımcı olmak için yaralı ya da engelli kişilerin rehabilitasyonu alanda kullanılmaktadır. ASF, biyomekanik biofeedback bir alt kategori, kinematik dengelemek ya da yürüyüş ile ilgili parametreleri ölçmek ve uygulamalı uyaran çeşit yoluyla bireye bu bilgileri iletişim kurmak için harici sensörler kullanır. biyomekanik geribildirim giderek daha popüler bir yaklaşım mekansal yanı sıra zamansal geribildirim sağlamak için vücudun farklı bölgelerinde yerleştirilen küçük titreşimli motorlar, ya da kontaktörü, istihdam etmektedir. Önceki edebiyat p gösterdialt ekstremite amputasyon, vestibüler engelli bireylere uygulamalarda vibrotactile geribildirim kullanımını destekleyen sonuçlar romising ve yaşlanma-ilgili denge 5 kaybını – 9.
Belirli uyaranlara bireyin algı ve tepki kontrol eden mekanizmaların tam olarak anlamak, farklı uygulamalar için ASF sistemlerinin etkin bir şekilde uygulanmasını bilgilendirmek için gereklidir. vibrotactile geribildirim için, bu mekanizmalar arasında baş propriosepsiyonu ve sensorimotor tepkisi, özellikle uygulanan titreşimlere kullanıcı duyarlılık ve istenen reaksiyonu yürütmek için gerekli olan zaman vardır. Titreşim uyaranlara yoluyla iletilen herhangi bir duyusal bilgi, belirli titreşim frekansı kombinasyonları, genlik, konumu ve dizi olarak kodlanmış olması gerekir. Bu nedenle, vibrotactile ASF sistemlerinin tasarımı olarak, uyaranların kullanıcının algı ve yorumlama maksimize etmek parametrelerin kombinasyonları seçmelisiniziyi zamanında ve ortaya çıkan motorun tepki doğruluğu. Bu protokolün amacı, farklı duyusal engelli nüfusa sahip kullanılmak üzere ASF sistemlerinin tasarımını bilgilendirmek için çeşitli titreşim uyaranlara yanıt süreleri ve tepki doğruluğunu değerlendirmek için bir platform sağlamaktır.
Yöntemleri burada açıklanan dokunsal ve vibrotactile geribildirim 3,5,6 insan algısını keşfetmeye önceki araştırmalar üzerine inşa ve iki önceki çalışmalarda 10,11 kullanılmak üzere geliştirilmiştir. Son iki çalışma her iki parametre önemli ölçüde sonuç önlemleri etkilediği gösteren alt ekstremite amputasyon doğruluk ve kullanıcı tepkilerinin zamanında titreşim frekansı ve konumu etkilerini incelemek için bu protokolü istihdam ve tepki doğruluğu yüksek derecede olabilir elde etti. Bu sonuçlar, gelecekteki çalışmalar ve vibrotactile ASF sistemlerinin klinik uygulamalarda kontaktörü ideal yerleşim bilgilendirmek için kullanılabilir. Diğer son çalışmasıCrea ve ark., 12 algılanan titreşim desenleri değişiklikleri yerine motor tepkisini belirtmek için sözlü tepkiler kullanarak, yürüyüş sırasında uyluk uygulanan titreşim desenleri değişikliklere kullanıcı duyarlılığı incelendi. Bu sözlü tepkiler algılama doğruluğunu ölçmek için kullanılabilir olsa da, motor kontrol sürecinde mevcut olabilir hatalar ve gecikmeler hesaba katmaz.
Aşağıdaki deneyler için birincil kurulum darbe genişliği modüle bir mikro kurulu çıkış pini bağlanmış titreşimli motorların birçok parçadan oluşur. pansiyon, sırayla, ticari olarak mevcut sistem tasarım yazılımı çalıştıran bir bilgisayara Universal Serial Bus (USB) bağlantısı üzerinden kontrol edilir. Motorlar yeterli voltajı sağlamak için ek bir yükseltme devresi gerektirir ve mevcut vibrasyon geniş bir frekans aralığı üzerinde temin edilir. Bir örnek amplifikatör devresi Şekil 1'de gösterilmiştir. Iki kutuplu kavşak transistor (BJR) Şekil etkinliğinin arttırılması ile ve daha küçük boyutta daha küçük metal oksit yarı-iletken alan etkili transistor (MOSFET) ile ikame edilmiş olabilir. Aynı şekilde, tüm amplifikatör devresi ek kontrol ve indirgenmiş boyutu sağlamak için bir kullanıma hazır haptik motor sürücü ile ikame edilmiş olabilir. Her motor kendi devresini gerektirir ve on motorlar kadar bu yazıda belirtilen ekipmanı kullanarak tek bir mikroişlemci kurulu tarafından kontrol edilebilir.
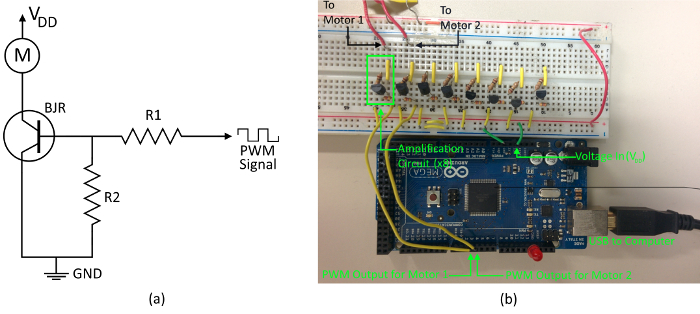
Şekil 1. Motor Kablolama. (A) tek bir titreşim motoru için amplifikasyon devresi gösterilmiştir. Her motor ayrı bir devre gerektirir ve mikrodenetleyici üzerinde benzersiz bir PWM çıkış portuna bağlı olmalıdır. V DD burada mikrodenetleyici tarafından sağlanan 3,3 V gücünü temsil ve sıfır gerilim uygulaması R2 transistör anahtarı sağlamak için açılan resister olarak hizmet direnç açık kalırYalan. (B) iki motorun fiziksel kablolama bir örnek. sekiz ayrı yükseltme devresi gösterilmiştir, ancak sadece iki titreşim işletme motorlarına bağlanmıştır. Bu protokol, R1 = 4.7 kÊ ve R2 = 100 kÊ içinde. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
