Die meisten Arthropoden bewegen Antennen oder andere Anhängsel, ökologische Hinweise und Signale in Raum und Zeit zu probieren. Die Antennen können die Tiere ihrer Umgebung navigieren durch das Erkennen von sensorischen Signale wie flüchtigen chemischen Stoffen und geschmackliche und mechanische Reize1,2,3,4. Bei Insekten enthalten die Antennen sensorische Rezeptoren, die an flüchtigen chemischen Stoffen4,5,6 binden und übertragen dieses Signal über olfaktorischen sensorischen Neuronen auf zentrales Gehirn Regionen1,7 ,8,9. Die Insekten können um Informationen zu eingehenden Gerüche4,10,11modulieren Antennen Positionen anpassen. Diese Modulation ermöglicht aktiv informierte Verhaltensreaktionen auf Gerüche und ihre Federn12,13.
Viele Insekten, darunter Hautflügler (z. B. Honigbienen und Hummeln), Schmetterlinge (z. B. Schmetterlinge) und Dipteren (z.B., fliegen und Mücken), unter anderem feed durch die Ausweitung ihrer Rüssel14 , 15 , 16 , 17 , 18 , 19 , 20 , 21. Rüssel Erweiterung zuverlässig betätigt wurde in der Vergangenheit für eine Vielzahl von lernen und Gedächtnis Aufgaben22,23,24,25,26, 27,28,29,30,31. Quantitative Bewertung der Antennen-Bewegung mit hoher zeitlicher und räumlicher Auflösung könnte in ähnlicher Weise Einblick in die Beziehung zwischen der Reiz, das Verhalten und die inneren Zustand des Tieres ergeben. In der Tat Vorarbeiten hat gezeigt, wie die Riechzentrum Bewegungen enthalten eine reiche Menge von Informationen über Honig Biene-Tracking der Umwelt und wie die Bewegungen ändern mit32,33,34lernen, 35,36,37,38.
In den letzten zehn Jahren wurden Methoden zur Beobachtung von Verhaltens der Tieren stark durch Fortschritte in der hochauflösenden Video-Kameras, Computer, Verarbeitungsgeschwindigkeit und Machine-Vision-Algorithmen, beschleunigt. Aufgaben wie das Tier erkennen, zählen, Tracking und Standortanalysen Präferenz haben mit ausgeklügelte Software, die Videos des Tierverhaltens verarbeiten kann gefördert worden und Extrakt relevanten misst39,40, 41,42,43,44,45,46,47.
Diese Technologien haben auch Verfolgung von Insekten Antenne und Rüssel Bewegungen gefördert. Es ist möglich, dass menschliche Rater einen Mauscursor verwenden, um manuell die Position der Antennen zu verfolgen. Während dieser Methode genau sein kann, die Aufgabe ist jedoch zeitaufwendig, und menschliche Unaufmerksamkeit und Müdigkeit unzuverlässigen Ergebnissen führen können. Spezielle Ausrüstung und Vorbereitung können verwendet werden, um die Notwendigkeit für komplexe Software zu reduzieren. Zum Beispiel ein Setup verwendet eine Hochgeschwindigkeitskamera und malte die Spitzen der Antennen, die Antenne Bewegung48zu verfolgen. Benutzer können auch Schlüssel-Frames des Videos, die Software zu unterstützen, bei der Aufdeckung von der Antenne und Rüssel Standort49auswählen aufgefordert. Ein weiterer Ansatz erkannt die zwei größten Bewegung Cluster um Antennen zu identifizieren, aber es erkennt nicht den Rüssel Lage50. Ein anderes Softwarepaket kann Antenne und Rüssel Standorte erkennen, aber erfordert ca. 7,5 s von Bearbeitungszeit pro Frame51, die unerschwinglich für Echtzeit- oder langfristige Beobachtung Studien sein könnte. Schließlich, es könnte möglich sein, kommerzielle Software-Pakete (z. B. EthoVision) zum Ausführen der Aufgabe46anpassen, ihre Kosten für Lizenzierung und Ausbildung können jedoch unerschwinglich.
Mit dem hier beschriebenen Verfahren verlängern wir unsere bisherige Arbeit auf Bewegung Analyse Software41 , die Standorte der Insekten Antennen und Rüssel mit den folgenden Zielen zu verfolgen: (1) keine Notwendigkeit, spezielle Hardware oder komplexe tierische Vorbereitung (2). Frame-Verarbeitung in Echtzeit (30 fps oder schneller) auf einem herkömmlichen Computer (3) einfache Verwendung und (4) Open-Source, leicht erweiterbar Code.
Die daraus resultierende neue Methode und Open Source Software, SwarmSight Anhängsel Tracking, erfordert keine Malerei der Antennen-Tipps, kann eine Verbraucher-Web-Kamera verwenden, um Videos und Prozesse video-Frames mit 30-60 fps auf einem herkömmlichen Computer (erfassen ( Abbildung 1). Die Software übernimmt die video-Dateien als Eingabe. Der Benutzer lokalisiert die Position des Kopfes Insekten in dem Video, und nach der Verarbeitung entsteht eine durch Komma getrennte Werte (CSV) Datei mit den Standorten der Antennen und Rüssel. Die Software ist in der Lage Hunderte von verschiedene video-Formate (einschließlich der Formate, die von den meisten Digitalkameras produziert) durch den Einsatz von FFmpeg Bibliothek52lesen.
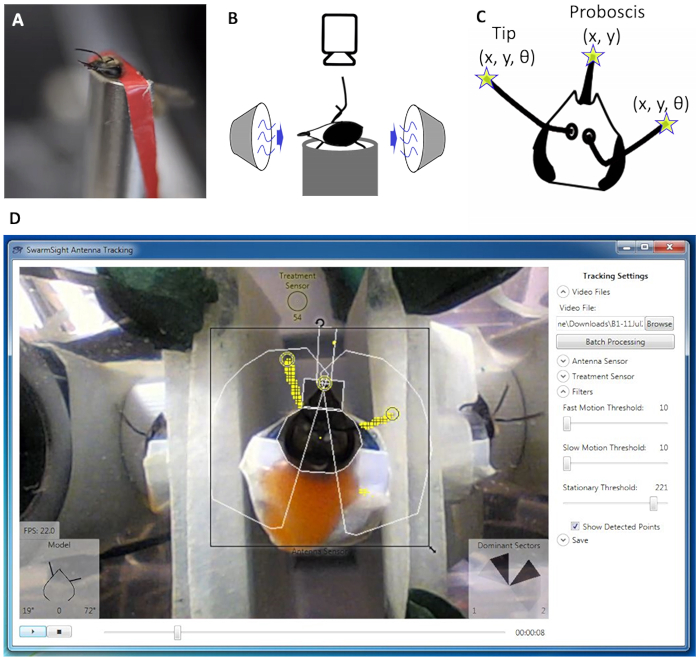
Abbildung 1: tierische Setup und Software Ausgabe. (A) A Honig Biene Sammler mit seinem Kopf und Körper in einem Kabelbaum zurückgehalten. (B) Geruch Quelle sich vor dem Tier, eine Videokamera befindet befindet sich oben, und eine Vakuumquelle befindet sich hinter dem Tier. (C) die Antenne Tip und Rüssel Variablen erkannt durch die SwarmSight-Software aus dem Video. (D) der Benutzer Positionen den Antenne Sensor über das Tier und passt die Filterparameter. Die Software erkennt die Antenne und Rüssel Positionen (gelbe Ringe).Bitte klicken Sie hier, um eine größere Version dieser Figur.
Erstens sind ein Insekt Körper und den Kopf in einem Kabelbaum Verhalten, so dass die Antenne und Rüssel Bewegungen leicht (Abbildung 1A) eingehalten werden. Eine Geruch-Quelle wird vor das Insekt mit einer Vakuumquelle platziert hinter, die Gerüche aus der Luft entfernen und minimieren potenzielle Auswirkungen der sensorischen Adaption (Abbildung 1 b) aufgestellt. Eine herkömmliche Webkamera wird über das Insekt Kopf auf einem Stativ platziert. Eine LED kann positioniert werden, innerhalb der Kamera-Ansicht, um anzuzeigen, wenn der Geruch präsentiert wird.
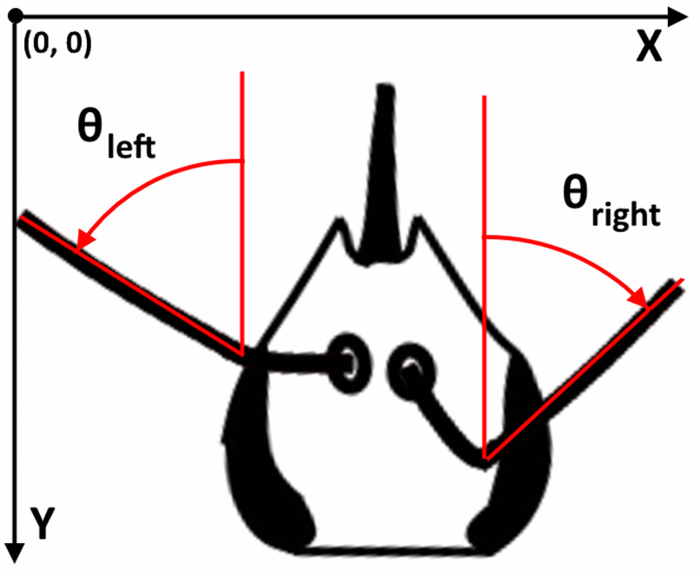
Abbildung 2: Antenne Koordinatensystem. X, Y-Werte der video Koordinatensystem verwenden, wo ist oben links den Ursprung und die X- und Y-Werte erhöhen, wenn in Richtung der unteren rechten Ecke. Winkel werden in Grad in Bezug auf die Vorderseite des Kopfes (in der Regel die Geruch-Quelle) ausgedrückt. Dem Wert “0” bedeutet, dass die Linie gebildet durch die Antenne Flagellum direkt vor das Tier weist. Alle Winkel sind positiv, außer wenn eine Antenne weist auf die entgegengesetzte Richtung (z. B. richtige Flagellum Punkte auf der linken Seite). Bitte klicken Sie hier für eine größere Version dieser Figur.
Nach den Dreharbeiten, wird die Videodatei mit der SwarmSight-Software geöffnet, wo der Benutzer Positionen der Antenne Sensor Widget (Abbildung 1, schwarzes Quadrat) über den Kopf des Insekts und beginnt die Videowiedergabe. Wenn die Ergebnisse gespeichert werden, die CSV-Datei enthält die X-und Y-Positionen der Antenne-Tipps, die Antenne Winkel im Verhältnis zu der Vorderseite des Kopfes (Abbildung 2) und den Rüssel X, Y-Position. Darüber hinaus wird eine dominierende Sektor Metrik für jede Antenne berechnet. Die metrische zeigt, die welche der fünf 36-Grad-Sektoren rund um jede Antenne die meisten Punkte enthalten als wahrscheinlich die Antennen und können nützlich sein, wenn die Antenne Positionswinkel/Metriken nicht zuverlässig durch laute oder anderweitig problematische Videos sind.
Kurz gesagt, funktioniert die Software mithilfe eines Satzes von Bewegung Filter53 und eine entspannte Flut Füllung Algorithmus54. Zwei Filter werden verwendet, um wahrscheinlich Antenne Punkte zu finden: eine 3-Mal in Folge-Frame Unterschied Filter41,55 und Median Hintergrundabzug56 Filter. Schwelle Farbfilter Abstand dient zur Erkennung Rüssel. Die oberste 10 % der Punkte der einzelnen Filter kombiniert, und ein Flut-Füllung-Algorithmus, der zusammenhängenden Punkte mit Lücken bis zu 2 Pixel (px) inspiziert lokalisiert Extrempunkte. Parallele Dekodierung Frame, Verarbeitung, und Rendering-Pipelines und optimierte Speicher Zuweisung des Datenflusses Filter hohen Leistung erreicht. Die rohen x und y Koordinatenwerte produziert von der Software sind nach der Verarbeitung mit einem 3-Frame rollenden Medianfilter57 (siehe Diskussion). Die Anweisungen, um den vollständigen Quellcode herunterzuladen finden Sie Online-58.
Unten ist ein Protokoll zur Antenne tracking ein Honig Biene Forager Vorbereitung. Ein ähnliches Protokoll könnte verwendet werden, um die Antenne/Rüssel Bewegungen des anderen Insekts zu verfolgen. Im Abschnitt “Ergebnisse” beschreiben wir eine Probe Antenne Trace-Ausgabe, die von der Software, der Vergleich der Software-Ausgabe auf Tracking durchgeführt durch menschliche Rater und Bewertung des Antennen-Bewegung als Reaktion auf fünf Geruchsstoffe erkannt wird.
