Ifølge dataene som ble avdekket av Global Health Estimates i 2016, er trafikkskade den åttende årsaken til globale dødsfall, noe som fører til 1,4 millioner dødsfall overhele verden 1. I år 2018 var 39,2 % av trafikkulykkene kollisjoner med motorvogner i transport, og 7,2 % av disse var bakkollisjoner. En løsning for å øke kjøretøy- og trafikksikkerheten er utviklingen av et avansert kjøreassistansesystem (ADAS) for å advare sjåfører med potensielle farer. Data har vist at ADAS i stor grad kan redusere hastigheten på bakkollisjoner, og det er enda mer effektivt når det er utstyrt med et automatisk bremsesystem2. I tillegg, med utvikling av autonome kjøretøy, mindre menneskelig involvering vil være nødvendig for å kontrollere kjøretøyet, noe som gjør en take-over forespørsel (TOR) varslingssystem en nødvendighet når det autonome kjøretøyet ikke regulerer seg selv. Utformingen av ADAS og TOR-varslingssystemet er nå et viktig stykke teknologi for sjåfører for å unngå overhengende ulykker i løpet av få sekunder. Det eksemplet brukte en vibrerende verktøykasse sammen med en kjøresimuleringsplattform for å undersøke hvilket sted som ville generere det beste resultatet når et vibrottilt kontaktsystem har blitt brukt som et potensielt ADAS- og TOR-varslingssystem.
Kategorisert etter perseptuelle kanaler, det er vanligvis tre typer advarsel modaliteter, det vil si visuelle, auditive og taktile. Hver advarsel modalitet har sine egne fordeler og begrensninger. Når visuelle varslingssystemer er i bruk, kan sjåførene lide av visuell overbelastning3, noe som svekker kjøreprestasjoner på grunn av uoppmerksomhetsblindhet4,5. Selv om et hørselslig varslingssystem ikke påvirker sjåførenes synsfelt, avhenger effektiviteten i stor grad av omgivelsene som bakgrunnsmusikk og andre lyder i kjøremiljøet6,7. Situasjoner som inneholder annen ekstern auditiv informasjon eller betydelig støy kan derfor føre til uoversiktsomhet8,9, noe som reduserer effektiviteten av et hørselsvarselssystem. Til sammenligning konkurrerer ikke taktile varslingssystemer med sjåførenes visuelle eller auditive behandling. Ved å sende vibrottile advarsler til drivere, overvinner taktile varslingssystemer begrensningene til visuelle og auditive varslingssystemer.
Tidligere studier viste at taktile advarsler kan være til nytte for sjåførene ved å forkorte bremseresponstiden. Det ble også funnet at taktile varslingssystemer gir et mer effektivt resultat over visuelle10,11 og auditive12,13,14 varslingssystemer i visse situasjoner. Begrenset forskning har imidlertid fokusert på å undersøke den optimale plasseringen for å plassere en taktil advarselsenhet. Ifølge sensorisk cortex hypotese15 og sensorisk avstandhypotese16, valgte den forbildede studien finger-, håndledds- og tempelområdene som eksperimentelle steder for å plassere en taktil advarselsenhet. Med den introduserte protokollen kan frekvensen og leveringstiden for en vibrerende advarsel, og intervaller mellom vibrasjoner av vibrerende verktøykasse, konfigureres for å passe til de eksperimentelle kravene. Denne vibrerende verktøykassen besto av en hovedbrikke, en spenningsregulatorbrikke, en multiplekser, en USB til Transistor-Transistor-Logic (TTL)-adapter, en metalloksid-halvleder felteffekttransistor (MOSFET) og en Bluetooth-modul. Antall vibrerende moduler kan også variere i henhold til forskernes behov, med opptil fire moduler som vibrerer samtidig. Når du implementerer vibrerende verktøykasse i kjørerelaterte eksperimenter, kan den konfigureres til å passe til de eksperimentelle innstillingene, samt synkroniseres med kjøreytelsesdata ved å revidere kodene for kjøresimuleringen.
Mens for forskere, gjennomføre et kjøreeksperiment på en virtuell plattform er mer gjennomførbart enn i den virkelige verden på grunn av risiko og kostnader involvert. For eksempel kan det være vanskelig å samle inn ytelsesindikatorer, og det er vanskelig å kontrollere miljøfaktorene som er involvert når eksperimenter utføres i den virkelige verden. Som et resultat, mange studier har brukt fast-base kjøring simulatorer kjører på PCer de siste årene som et alternativ til å gjennomføre on-road kjøring studier. Etter å ha lært, utviklet og forsket på i over 11 år i kjøreforskningsmiljøet, etablerte vi en kjøresimuleringsplattform med en ekte bil som består av en åpen kildekode-programvare for kjøring og et maskinvaresett, inkludert ratt og girkasse, tre pedaler, tre monterte projektorer og tre projektorskjermer. Med kjøresimuleringsprogramvaren støtter bare en enkelt skjerm, brukte den presenterte protokollen bare den sentrale projektoren og projektorskjermen til å gjennomføre eksperimentet.
Det er to store fordeler ved å bruke den presenterte kjøresimuleringsplattformen. En fordel med denne plattformen er at den bruker en åpen kildekode-programvare. Ved hjelp av den brukervennlige åpen kildekode-plattformen kan forskere tilpasse simulerings- og vibrerende verktøykasse for sine unike forskningsbehov ved å gjøre enkel programvarekonfigurasjon uten kodeutvikling . Ved å revidere kodene, forskere kan lage kjøring simuleringer som gir relativ troskap til virkeligheten med mange alternativer tilgjengelig på biltyper, veityper, motstand av rattet, lateral og langsgående vind turbulens, tid og brems hendelse program grensesnitt (APIer) for ekstern programvaresynkronisering, og gjennomføring av atferdsparadigmer som bil-følgende oppgave og N-Back oppgave. Selv om kjøring av kjørerelatert forskning i en kjøresimulator ikke fullt ut kan replikere kjøring i den virkelige verden, er data samlet inn gjennom en kjøresimulator rimelig og har blitt mye vedtatt avforskere 17,18.
En annen fordel med den foreslåtte kjøresimulatoren er den lave prisen. Som nevnt tidligere, den introduserte kjøring simulering programvare er en åpen kildekode programvare som er tilgjengelig for brukere gratis. I tillegg er den totale kostnaden for hele maskinvareoppsettet i denne protokollen lavere sammenlignet med typiske high-fidelity kommersielle kjøresimulatorer. Figur 1 a og b viser hele oppsettet av to kjøresimulatorer med kostnaden fra $ 3000 til $ 30000. I motsetning, typisk high-fidelity kommersielle kjøring simulatorer (fast-base) vanligvis koster rundt $ 10.000 til $ 100.000. Med sin svært rimelige pris kan denne kjøresimulatoren være et populært valg, ikke bare for akademiske forskningsformål, men også for å gjennomførekjøreklasser 19 og for demonstrasjon av kjørerelaterteteknologier 20,21.
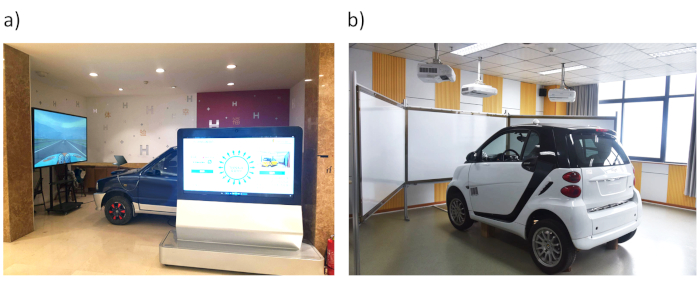
Figur 1: Et bilde av kjøresimulatorene. Begge kjøresimulatorene besto av ratt og girkasse, tre pedaler og et kjøretøy. (a) En $ 3000 kjøring simulator oppsett som brukte en 80-tommers LCD-skjerm med en oppløsning på 3840 × 2160. (b) En $ 30000 kjøresimulator oppsett som brukte tre monterte projektorer og tre projektorskjermer med en dimensjon på 223 x 126 cm hver. Projeksjonsskjermene ble plassert 60 cm over bakken og 22 cm fra forsiden av kjøretøyet. Bare den sentrale projektoren og projektorskjermen ble brukt til det nåværende eksperimentet. Vennligst klikk her for å se en større versjon av denne figuren.
Kjøring simulering programvare og vibrerende verktøykasse i den foreslåtte metoden har allerede blitt brukt i tidligere studier av våre forskere22,23,24,25,26,27,28,29. Denne selvutviklede vibrerende verktøykassen etter ISO-standarden30 kan brukes i forskjelligefelt 31,32 ved å justere vibrasjonsfrekvensen og intensiteten. Det er viktig å merke seg at en nyere versjon av vibrerende verktøykasse er utviklet og er innført i følgende protokoll. I stedet for å justere vibrasjonsfrekvensen ved hjelp av en justerbar spenningsadapter, er den nyere versjonen utstyrt med fem forskjellige vibrasjonsfrekvenser og kan justeres enklere ved hjelp av kodene i supplerende kodefil 1. Videre gir den presenterte kjøresimulatoren forskerne en trygg, billig og effektiv måte å undersøke ulike typer kjørerelatert forskning på. Dermed er denne protokollen egnet for forskningslaboratorier som har et begrenset budsjett og har et sterkt behov for å tilpasse eksperimentelle kjøremiljøer.
