Rat Colony Maintenance
The generation and characterization of Pink1 and Parkin single KO rats has been described previously22. The Pink1 and Parkin single KO rats were obtained from SAGE Labs (and now available from Envigo). DKO rats were generated by crossing Pink1-/- rats with Parkin-/- rats to obtain Pink1+/-/Parkin+/- rats, which were interbred to obtain Pink1-/-/Parkin-/- rats (will be available from Envigo). To confirm the deletion of 26 bp in Park6 (gene encoding Pink1), genotyping was performed using 5'-CCCTGGCTGACTATCCTGAC-3' forward and 5'-CCACCACCCACTACCACTTACT-3' reverse primers. Deletion of 5 bp in Park2 (gene encoding Parkin) was tested after DNA was amplified using a forward 5'-GGTGTCTTGGCTCAGTGTGA-3' and reverse 5'-GCCACCCAGAATAGCATCTC-3'. Amplified Polymerase Chain Reaction (PCR) samples were sent to ACGT Inc (Wheeling, IL) for sequencing (Figure S7). All rats were kept on the Long Evans Hooded (LEH) background. DKO rats were viable and fertile; however, there was a high rate of mortality among DKO dams at the time of parturition (approximately 30%). Only male rats were utilized in these experiments. Rats were kept in a temperature-controlled environment with a 12-hour light/dark cycle and free access to rat chow and water.
Outcomes
To serve as an example of the utility of the FTIR gait analysis system for rats, adapted from14, we performed gait analysis on male WT and Pink1/Parkin DKO rats at 2 months of age to determine if the use of kinematic gait analysis could uncover subtle motor impairments not observed with human visual perception prior to the appearance of gross motor problems starting at 4 months of age.
Similar to previous gait studies in mice14, the adapted FTIR system was able to display the footprint pattern created by the walking rat as well as the path created by the body center (Figure 1A). Despite the increased weight of the DKO rats as compared to WT (Figure 1B), the foot pressure applied to the walking surface (visualized as heat maps) as determined by the intensities of the FTIR signal, was unaltered (Figure 1C). Upon assessment of several gait parameters as a function of walking speed (Figure 1D-H), we observed that the walking speed and step lengths were similar between WT and DKO rats (Figure 1D). However, the variation between WT and DKO rats became apparent in stance phase and swing duration at slower walking speeds (Figure 1E, F). The fraction of the step cycle where the leg is in the stance phase (stance duration / period) is the duty factor, and this parameter highlights more time spent in the swing phase than in the stance phase as the duty factor decreases, typical of running (Figure 1G). Again, differences are highlighted at lower speeds. Further, while swing speeds increase with increased speed in WT animals, the correlation is blunted in DKO rats (Figure 1H).
The FTIR gait analysis also allowed for plots of stance phase traces of each leg relative to the body in freely walking rats (Figure 2A, B). The stance traces are normalized to body length and are defined as the position of the foot relative to the body center from paw touchdown (anterior extreme position, AEP) to the end of the stance phase (posterior extreme position, PEP). Upon comparing the paw positioning, we observed significant changes in AEP (left hindlimb) and PEP (right hindlimb) suggesting the left hindlimb is closer to the body during paw touchdown (AEP), while the right hindlimb is further away from the body during paw takeoff (PEP) in DKO as compared to WT rats (Figure 2C).
Several additional parameters were significantly changed in the DKO rats as compared to WT. In particular, changes in hindlimb swing patterns were uncovered. The swing speed of both the left and right hindlimbs was increased in DKO rats as compared to WT rats (Figure 3A), while the swing duration of both left and right hindlimbs was decreased (Figure 3B). Of note, step length was unaltered (Figure 4).
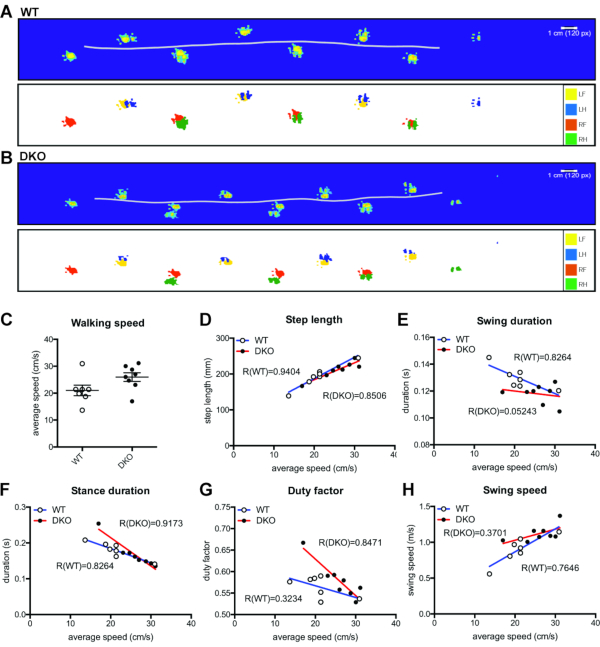
Figure 1. Footprint pattern and step parameter analysis. Representative footprint patterns for (A) WT and (B) DKO rats showing (top panel) footprint heat map representing pixel intensity and horizontal line representing the body path as well as (bottom panel) individual feet labeled with different colors: left fore (LF, yellow), left hind (LH, blue), right fore (RF, orange), and right hind (RH, green). (C) Average walking speed for each WT (n = 7) and DKO (n = 8) rat. Mean with SEM. Not significant. (D-H) Step parameters as a function of speed in WT (n = 7) and DKO (n = 8) rats. Linear regression lines and R square values included. (D) Step length increases with speed in WT and DKO rats. (E) Swing duration is inversely proportional to speed in WT rats, but not in DKO rats (R not significant). (F) Stance duration decreases with speed in WT and DKO rats. (G) Duty factor is inversely proportional to speed in DKO rats, but not WT rats (R not significant). (H) Swing speed increases linearly with speed in WT rats, but not DKO rats (R not significant). Please click here to view a larger version of this figure.
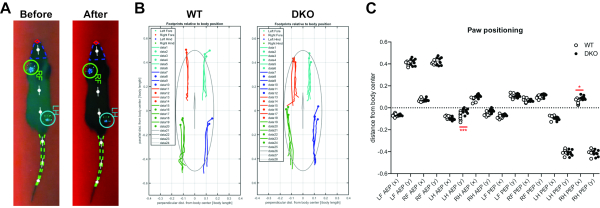
Figure 2. Stance traces and paw positioning analysis. (A) Representative walking track analysis for a WT rat (before and after background correction) visualized with nose (red solid), head contour (blue dashed), tail contour (green dashed), body center (white dashed), and footprints (circles: green, RF and light blue, LH). (B) Representative plots of stance traces for freely walking WT and DKO rats. (C) Paw positioning in WT (n = 7) and DKO (n = 8) rats are shown. AEP, anterior extreme position; PEP, posterior extreme position; L, left; R, right; F, forepaw; H, hindpaw. Mean with SEM. Significant compared to WT (p < 0.05*, 0.001***) using two-way ANOVA and Sidak's multiple comparison test. Please click here to view a larger version of this figure.
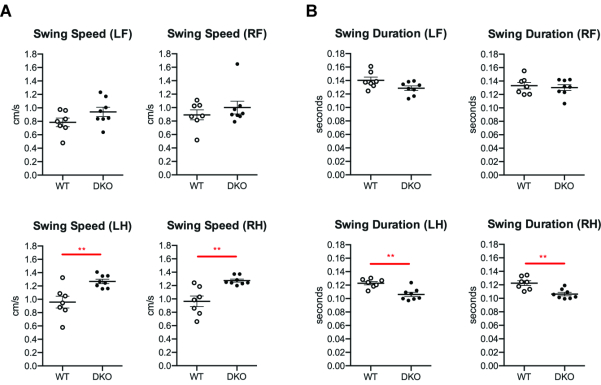
Figure 3. Hindpaw swing parameters altered in DKO rats. Forepaw and hindpaw measurements of the (A) speed at which paws are moving and the (B) time paws are airborne in WT (n = 7) and DKO (n = 8) rats. L, left; R, right; F, forepaw; H, hindpaw. Mean with SEM. Significant compared to WT (p < 0.01**) using Student's unpaired two-tailed t-test with Welch's correction. Please click here to view a larger version of this figure.
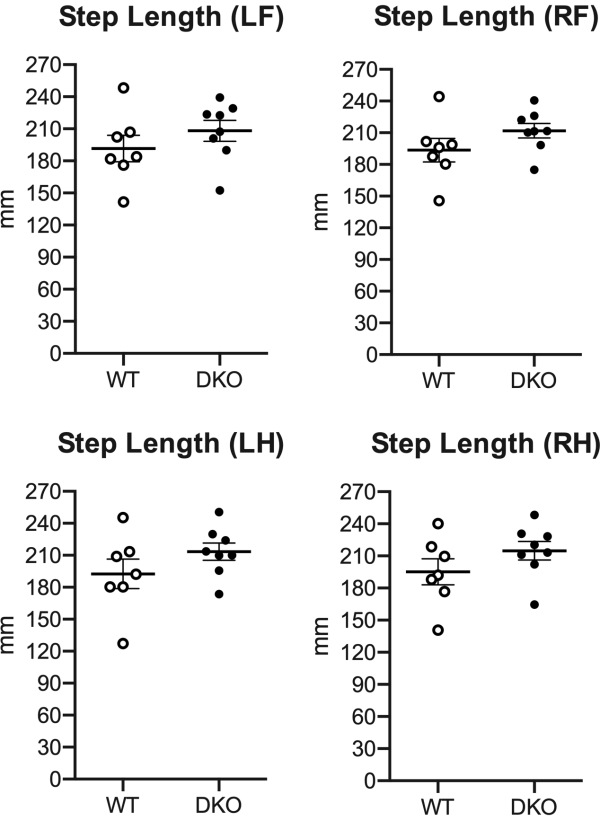
Figure 4. Step length unaltered in DKO rats. Forepaw and hindpaw measurements of the step length in WT (n = 7) and DKO (n = 8) rats. L, left; R, right; F, forepaw; H, hindpaw. Mean with SEM. Significant compared to WT (not significant) using Student's unpaired two-tailed t-test with Welch's correction. Please click here to view a larger version of this figure.
Supplemental Figure. Please click here to download this file.
Supplemental Table. Please click here to download this table.
