The Robo-AO laser adaptive-optics system is used to compensate for atmospheric turbulence and produce diffraction-limited-resolution images at visible and near-infrared wavelengths. Figure 1A shows an image of a single star seen in red light through uncompensated atmospheric turbulence with an image width of 1.0 arc second. Figure 1B shows the same star after adaptive optics correction: the image width decreases to 0.12 arc seconds, slightly larger than a perfect image width of 0.10 arc seconds at this wavelength on a 1.5-m telescope. The first Airy ring, a result of diffraction, can be seen as the faint ring like structure around the core of the image. This much-improved angular resolution enables the discovery of binary and multiple star systems (e.g. Figure 1C and observations by ref. 40) and for the detection of much fainter stars in dense fields such as the globular cluster of Messier 3 (seen in the near-infrared; Figure 6) that would otherwise be impossible to directly view through atmospheric turbulence. Features of solar-system objects, such as the cloud surface of Jupiter as well as its transiting moon Ganymede (Figure 7), can also be seen with a greater degree of clarity when viewed with laser adaptive optics.
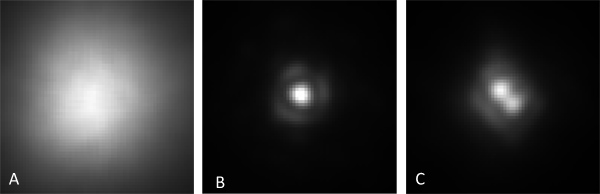
Figure 1. Adaptive optics correction at visible wavelengths. Each figure represents a 1.5 × 1.5 arc second field-of-view on sky. (A) A long-exposure single image of a single star, mV =3.5, seen through uncompensated atmospheric turbulence in i-band (λ = 700 – 810 nm) at the 1.5-m P60 telescope at Palomar Observatory. The full-width at half-maximum (FWHM) is 1.0 arc seconds. (B) The same star as in (A) with laser adaptive optics correction using the Robo-AO system. The core of the stellar image has 15 times the peak brightness of the uncompensated image and has a FWHM of 0.12 arc seconds. (C) A binary star, mV =8.4, with a separation of 0.14 arc seconds is revealed through the use of the Robo-AO adaptive-optics system. In each case, tip-tilt guiding was performed the target itself.
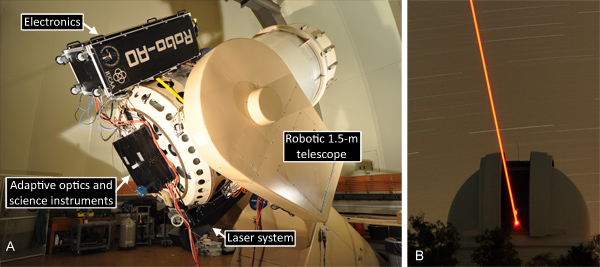
Figure 2. The Robo-AO laser adaptive-optics system. (A) The adaptive optics and science instruments are installed at the Cassegrain focus of the robotic 1.5-m P60 telescope at Palomar Observatory. The laser system and support electronics are attached to opposite sides of the telescope tube for balance. (B) The Robo-AO UV laser beam propagating out of the telescope dome. In this long exposure photograph, the laser beam is visible due to Rayleigh scattering off of air molecules; a tiny fraction of the light also scatters back toward the telescope to be used as a probe of the atmosphere. The laser beam appears orange because of the way UV light is transmitted through the color filters on the UV sensitive camera used to take the picture. Click here to view larger figure.
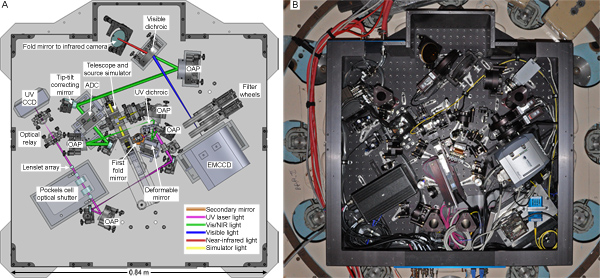
Figure 3. Robo-AO adaptive optics and science instruments. (A) A simplified CAD model. Light focused from the telescope secondary mirror (orange) enters through a small hole at the center of the instrument before being reflected by 90 degrees by the first fold mirror towards an off-axis parabolic (OAP) mirror. This mirror images the telescope pupil on the deformable mirror surface. After reflection from the deformable mirror, an UV dichroic splits off the laser light (violet) and directs it to the laser wavefront sensor. An additional reversed OAP mirror within the wavefront sensor corrects the non-common path optical errors introduced by the 10 km conjugate focus of the laser reflecting off of the first OAP mirror. The visible and near-infrared light (green) passing through the UV dichroic is relayed by a pair of OAP mirrors to the atmospheric dispersion corrector. The light is then reflected by the tip-tilt correcting mirror to a final OAP mirror which focuses the light towards the visible dichroic. The visible dichroic reflects the visible light (blue) to the electron-multiplying CCD and transmits the near-infrared light (red) to a fold mirror and ultimately to the infrared camera. The combined UV, visible and near-infrared light from the telescope and source simulator (yellow) can be directed to the adaptive optics and science instruments by translating the first fold mirror out of the way. (B) A corresponding photograph of the instrument package. Click here to view larger figure.
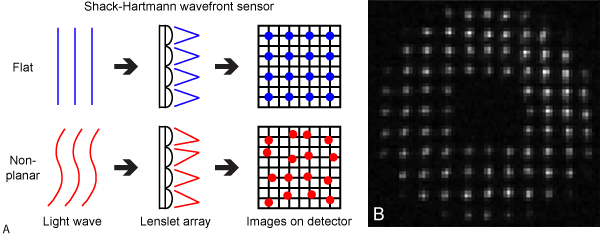
Figure 4. Shack-Hartmann wavefront sensor. (A) Conceptual diagram. As a flat wave passes through the lenslet array, a regular pattern of images is formed on the detector (blue). When a non-planar wave passes through the lenslet array, the local gradient of the wave affects the position of images formed by each lens of the array (red). (B) Pattern of laser images in the Robo-AO Shack-Hartmann wavefront sensor. Each of the 88 spots is an image of the laser scatter from 10 km as formed by each lens of the lenslet array, with the overall pattern shape determined by the geometry of the telescope pupil. The relative displacement of each image with respect to the reference image position (Procedure 1.6) gives a measurement of the local gradient of the incoming light wave. Click here to view larger figure.
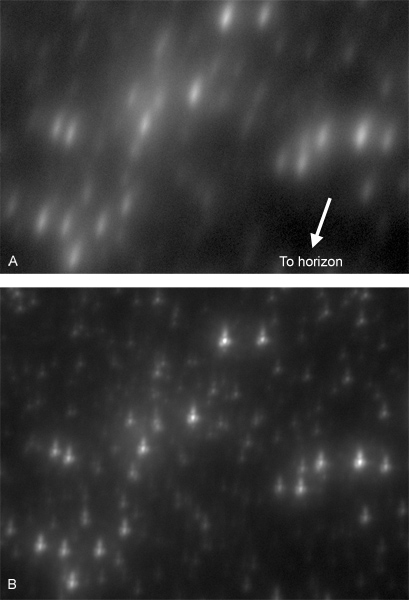
Figure 5. Correction of atmospheric prismatic dispersion. Adaptive optics corrected images of an 11 × 16 arc second subfield of the globular cluster Messier 15 at a telescope elevation of 45 degrees. (A) While adaptive optics corrects the effects of atmospheric turbulence, atmospheric prismatic dispersion still affects the images of individual stars: images are sharp parallel to the horizon, while elongated perpendicular to the horizon by approximately 1 arc second over a spectral bandwidth of λ = 400 – 950 nm. (B) By additionally using an atmospheric dispersion corrector to counteract the atmospheric prismatic dispersion, diffraction-limited-resolution imaging is recovered in both directions.
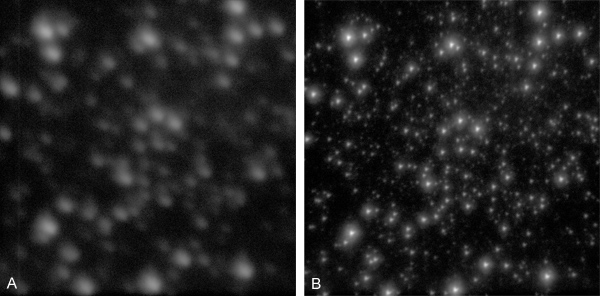
Figure 6. Images of the globular cluster Messier 3. (A) A 44 × 44 arc second field-of-view, 2-minute long uncompensated image of the core of the globular cluster Messier 3 in z-band (λ = 830 – 950 nm). (B) The same image shown with adaptive optics correction using Robo-AO revealing many stars that could not otherwise be seen.
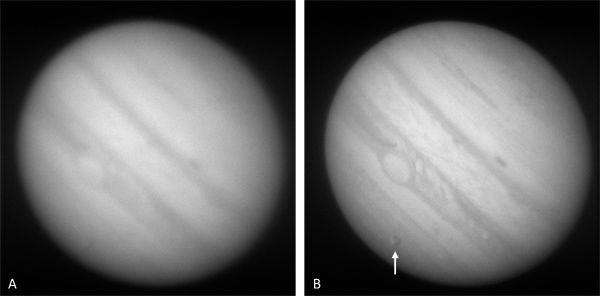
Figure 7. Images of Jupiter. (A) A 0.033-second uncompensated snapshot of Jupiter (apparent diameter of 42 arc seconds) in r-band (λ = 560 – 670 nm). (B) The same image with Robo-AO laser adaptive optics correction showing the surface cloud features and transiting Ganymede (arrow) with greater clarity.
