The main objective of this study was to use an array GPR system to visualize subsurface dynamic processes, such as water infiltration, it is also important to describe how the infiltration test was conducted.
1. Field Infiltration Test
- Select a site with a bare surface for the infiltration test.
Note: For this study, the infiltration test was conducted in a large greenhouse facility of the Arid Land Research Center of Tottori University, Japan. See the recent publication for more details16. - Position on the surface six 2.5-m long porous tubes parallel at a distance of 15-cm between each other, so as to ensure uniform infiltration (Figure 2).
- Connect one end of the tubes to a valve regulated inlet, which is connected to a water reservoir or to a faucet, and the other end to an outlet in order to remove excess water.
- Place a thin 910 x 1802 mm2 wood panel (slightly larger than the antenna array), to cover the porous tubes.
- Check the effect of the wood panel on the radar signal prior to the infiltration test.
- Install soil moisture sensors right next to the wood panel to monitor changes in the soil moisture content at various depths.
Note: The purpose of these sensors is to provide reference data used to cross-check the results obtained from the analysis of the GPR data. In this study, a rod-type soil moisture sensor (see Table of Materials) was installed next to the antenna to monitor the soil dielectric constant at 10, 20, 30, 40, 60, and 100 cm depths.
2. GPR Measurement
- Place the array GPR antenna on the wood panel.
Note: In this study, the antenna was left stationary to ensure consistency in the recorded signals. - Connect the antenna to the controller using coaxial cables.
- Connect the controller to a laptop PC with an Ethernet cable.
- Decide the antenna combinations and their sequence to ensure both common offset gather (COG) and multi-offset gather (MOG) are collected seamlessly.
Note: In this study, all the possible combinations for the array GPR at our disposal was used (110). It took less than 1.5 s to perform a full scan through all combinations. - Start the recording of the GPR data using the data collection software.
Note: It is important to start the data acquisition before water is injected into the porous tubes. - Open the valve to apply water (i.e., begin the infiltration process).
Note: The water injection rate in the subsoil can be determined from the hydraulic properties (e.g., hydraulic conductivity) of the target soil. The flow rate used in this study was 7,000 cm3/min, which was less than the saturated hydraulic conductivity of the dune sand. - After a predetermined amount of water is injected, close the valve.
Note: Water was injected continuously for 4 h, and a total of 1,680 L of water were used for the test. - Keep scanning with the array GPR for an additional period of time, in order to monitor the redistribution process for further analysis.
Note: The array GPR has been kept collecting data for 4 h after the valve had been closed. Nonetheless, these data have not been analyzed for the study presented here.
3. Data Analysis for Velocity Estimation
- Reconstruct COG and CMP data by extracting the relative Tx-Rx combinations from the overall data cube. This was achieved through some custom code developed by the authors which rearranged the radar profiles so to group together Tx-Rx pairs at identical offset (COG) and the ones with the same mid-point (CMP).
Note: Because a SFCW GPR unit was used for this study, the raw data is in the frequency domain; the operation of frequency to time conversion was performed using the software provided by the manufacturer of the GPR system. - Estimate the optimum EM wave velocity in the wetting zone at a given elapsed time by fitting the computed two-way travel time, tc, of the EM wave reflected at the infiltration front to the observed signals. The velocity with the best curve fit was determined heuristically.
 (1)
(1)
where d0 is the depth to the reflection point, x is the distance between Tx and Rx, vr is the root-mean-square velocity to the reflection plane and t0 is the two-way travel time at zero offsets determined from the CMP radargram.
Note: The most common velocity estimation method using MOG is semblance analysis5,15,17. In semblance analysis, the root mean square velocity is picked using a velocity spectrum. Semblance analysis was not used for velocity estimation in this study because the low signal-to-noise ratio observed in the array GPR data did not allow us to develop a reliable velocity spectrum. Finding an appropriate filtering method to generate a reliable velocity spectrum from these data is being investigated in other ongoing research. For the scope of this study, the curve fitting method was used to fit Eq (1) to the CMP radargrams. - Using Eq. (1), compute the wetting front depth d0 at a given elapsed time using the estimated EM velocity vr.
Note: For this part of the data analysis, the COG data set was used at an offset x equal to 113 mm.
Figure 3 shows a time-lapse panel diagram of 110 Tx-Rx combinations acquired every 1.5 s during the first 60 min of the infiltration experiment, after converting the data from frequency to time domain. In order to enhance reflections at depth, a bandpass filter was applied followed by gain compensation. The panel diagram can be divided into 10 sections, each section corresponding to a particular Tx. The location of the Tx is indicated by a white triangle, and each slice corresponds to a time-lapse signal recorded for an Rx. The vertical axis shows the two-way travel time or TWT, i.e. the time necessary for the EM wave to travel from the transmitter, to the eventual reflector and back to the receiver. The profiles display the signal amplitude in a grayscale color map. A large contrast in color indicates high amplitude in the recorded radar signal. EM wave reflections are produced at the interface between layers at different dielectric constant or by objects with different electrical characteristics than the surrounding medium; a high dielectric contrast will determine a high amplitude reflection. During the water infiltration process, there is a zone referred to as the transition zone where the water content gradually increases from the edge of the wetting zone, that is where water penetrates into the initially dry soil. The EM wave is likely to be reflected not at the very edge but within the transition zone, as observed in studies of water table detection18. In the remainder of the manuscript, this reflection area is referred to as the wetting front. In Figure 3, a high amplitude signal appears and moves steadily downwards as time advances during the experiment. This reflection is indeed produced by the wetting front as the water gradually penetrates downwards in the subsurface. From this diagram, COG and CMP can be reconstructed as shown in Figure 2 of Iwasaki et al.16
Velocity analysis was performed on the CMP data obtained every 1 min. For every set of CMP data, the two-way travel time given by Eq. (1) was fitted to the reflection from the wetting front by adjusting t0 and vr, assuming a uniform layer in the wet zone. Time zero was corrected by fitting the air wave with the velocity of 0.3 m/ns. Figure 4 shows CMP data at 5 min intervals from elapsed time te = 5 min to te = 50 min along with the best-fit curves displayed as white lines (solid lines for the reflected wave and dashed line for the air wave). Since the air wave is not a reflected wave but the direct signal between transmitter and receiver, the travel time increases linearly with the offset. All the curves were fitted to the positive peaks (in white color) of the reflected waves. All the curves fitted well to the observed reflected curves shown in the CMP radargrams at all offsets, which means that the estimated values for t0 and vr are good. For the infiltration experiment, a dry wood panel was placed between the antenna and the porous tubes. Because the panel has a much lower dielectric constant than that of wet soil, its effects on the EM wave propagation may be not negligible, even though it is thin. A two-layer model was then considered in addition to the aforementioned uniform layer model, assuming a value of 3 for the dielectric constant of the top 5 cm. Also for this second model, the EM wave velocity vr was estimated by curve fitting at the reflection produced by the wetting front.
In Figure 5, estimated wetting front depths are plotted as a function of te for both the single and two-layer models. It can be appreciated that the wetting front moves downwards almost linearly with time for both models, with the exception of a slow-down between te = 10 min and te = 20 min. Differences between two models are initially not significant, but as time elapses the estimate for the uniform model moves slightly faster compared to the two-layer model. In Figure 5, diamond symbols are used to mark the times when readings from the moisture sensors started to increase and when they later became steady; these are connected with a solid line for every sensor depth. As mentioned above, the reflection of the EM wave does not necessarily occur at the very edge of the wet zone; in other words, considering a certain depth, one cannot expect this reflection to be matching the point in time when the readings from a sensor start to increase. In this sense, the reflection is attributable to a depth level at the infiltration front where a certain water saturation has been reached, compared to the area immediately below. Considering the sensors at 30, 40, and 60 cm in depth, the estimate of the wetting front depth obtained from the GPR data falls well in the range shown by the solid lines on the timeline. The time when the GPR estimated wetting front arrived at 20 cm depth corresponds to the time when the sudden increase in the sensor reading was observed, while the GPR estimate reached the depth of 10 cm much faster than what was produced by the moisture sensor, although the reflection signal from the wetting front is clearly observed after te = 5 min (Figure 4). Also, it has to be mentioned that the extrapolation of the GPR estimated curve does not pass through the origin. Although it is not clear what caused this discrepancy at shallower depths, there may be a few possible explanations. It can be attributed to heterogeneity in soil properties, or it may be due to non-uniformity in water application. If that is indeed the case, this would have a greater effect earlier during the infiltration process than at a later stage. Another explanation could be that surface roughness affects the determination of time zero. In addition to the effect of the wood panel and the porous tubes, the effect of surface roughness should be taken into account.
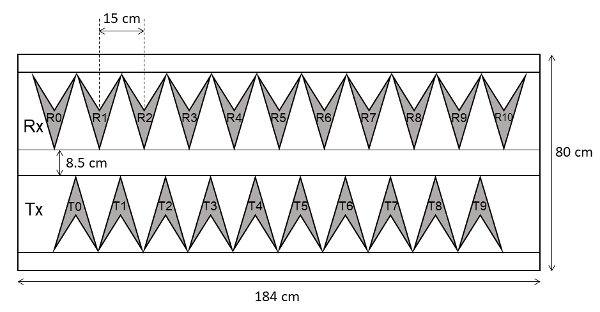
Figure 1: Schema of array ground penetrating radar antenna configuration used in this study. V-shaped structures are bowtie monopole antennas. There are 10 transmitting antennas (Tx) and 11 receiving antennas (Rx) aligned horizontally. Please click here to view a larger version of this figure.
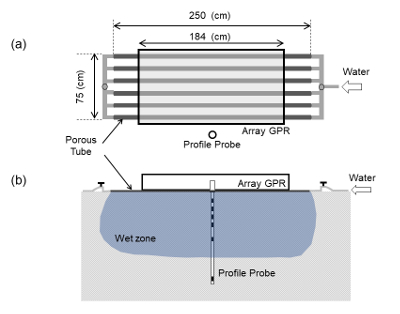
Figure 2: Schemas of the infiltration experiment. (A) a top view and (B) a side view in which the array antenna was placed on top of six 250-cm porous tubes aligned 15 cm apart. Please click here to view a larger version of this figure.
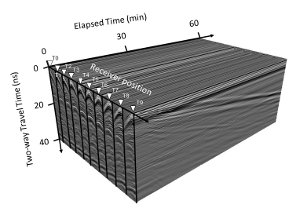
Figure 3: Time-lapse radargram obtained during the first 60 min of the infiltration experiment. Data consist of recorded signals for 110 antenna combinations. One slice corresponds to time-lapse data collected with a single Tx-Rx combination. A different color is used for signal amplitude. Vertical black lines separate data for each Tx. White triangles indicate the locations of Tx. Please click here to view a larger version of this figure.
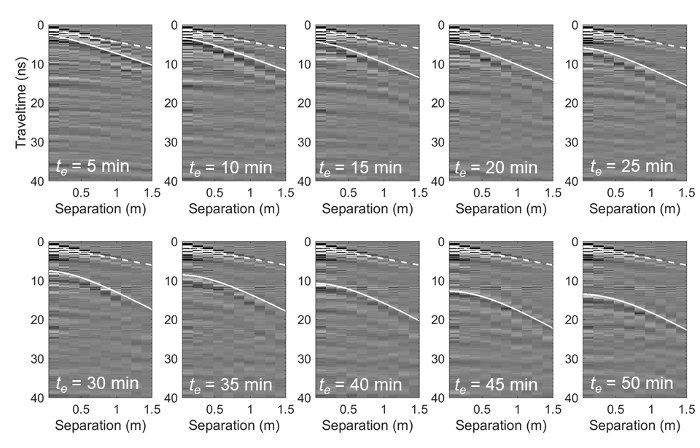
Figure 4: Radargrams of the CMP at te = 5 min to te = 55 min at 5 min intervals. The white solid lines represent manually fitted two-way travel time of the reflection from the wetting front, while the white dashed lines represent the travel time of the air wave. Please click here to view a larger version of this figure.
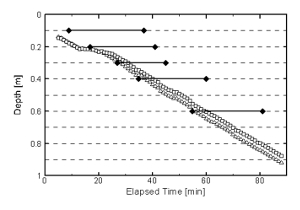
Figure 5: Wetting front depths. Wetting front depths estimated from array GPR in time-lapse multi-offset gather as a function of the elapsed time both for the uniform (triangles) and the two-layer (square) models. Black lines with diamonds at both ends show the time between the initial increase in readings and when these reached a steady level for each sensor depth (i.e., the duration of transition zone). Please click here to view a larger version of this figure.
