1. Laboratory safety check
- Review the safety rules relating to the use of the laser and flume system.
- Ensure that the safety training requirements of the laboratory have been met.
NOTE: In this experiment, a set of 5W air-cooling continuous wave laser with a wavelength of 532 nm and a glass-sided straight flume (Figure 1) with dimensions of 11 m length, 0.6 m width, and 0.6 m depth are used. The basic safety recommendations for these two apparatuses are as follows:- Check the potential reflection surfaces in the laser line-of-sight prior to testing; wear safety goggles when operating the laser device.
- Avoid having eyes at the level of the laser beam during the experiments and be careful of reflected laser lights when handling the optical elements or reflective tools.
- Ensure that the water hose does not fall off and that there is always no water overflowing from the flume.
2. Flume and seabed model setup
- Prepare the erodible seabed model located in the middle of the flume.
NOTE: The sediment material used in this study was a uniformly distributed medium sand with a median grain size d50 = 0.45 mm, relative submerged particle density Δ = 1.65 and geometric standard deviation σg = 1.30. - Compact and level the seabed using a sand leveler.
- Slowly fill the flume with a water hose and make sure that a flat seabed surface is intact during the filling process; stop filling when the water level has reached a depth of 0.4 m above the seabed.
- Clear the flume top platform and glass for setting up the pipeline model and PIV system.
3. Pipeline model and vibration system setup
- Use a prefabricated pipeline model in the form of an acrylic cylinder with a diameter of 35 mm and a length of 0.56 m.
- Mount the pipeline model on an aluminum supporting frame, which, in turn, is connected by two springs to a moveable pole on another fixed frame that is locked on the top rails of the flume, as illustrated in Figure 2. Fix the supporting frame inside the fixed frame by using four bearings to ensure that the supporting frame could freely vibrate only along the vertical direction (Figure 2).
- Use a connecting rod to tie the moveable pole to a servo motor mounted on the top of the fixed frame. In this study, the weight of the assembled vibrating system, including the pipeline model and the aluminum frames, is 1.445 kg, which has an equivalent mass ratio (m*) of 2.682; a natural frequency (fN) of 0.82 Hz; and damping ratio (ζ) of 0.124.
- Adjust the moveable pole and the supporting frame to obtain a certain gap ratio between the pipeline and seabed. In this study, G/D =1, where G is the vertical distance between the bottom of the pipeline and initial seabed surface; and D is the pipeline diameter.
- Turn on the servo motor to induce a forced vibration on the pipeline; adjust the supporting frames and four bearings to ensure that the pipeline vibration is along the vertical direction. Turn off the servo motor when adjustments of the supporting frames have completed.
- Compact and level the seabed again before running the experiment if the seabed model is disturbed in 3.5.
4. PIV setup
- Place the laser device on the top of the flume and install the laser sheet forming optics.
- Turn on the laser device and adjust the laser sheet forming optics so that an illuminated flat sheet inside the field-of-interest is formed.
NOTE: In this study, the illuminated green laser sheet is 1.5 mm thick, parallel to the flume glass walls and is cast downward into the water along the centerline of the flume. The field-of-interest of this study refers to the interaction region of the pipeline-fluid-seabed and is confined to the right half side of the pipeline. The shadow of the pipeline will be seen on the left half side of the pipeline. - Set up the high-speed camera.
NOTE: For this study, a high-speed camera with 12-gigabyte-memory storage and a maximum resolution of 2.3 Mpx (1920×1200) is used (e.g., Phantom Miro LAB 320). The detailed operation procedures are as follows:- Mount the lens with appropriate focal length on the high-speed camera. Screw the high-speed camera onto a height-adjustable tripod; adjust the camera to the level of the observation region with its axis perpendicular to the illuminated laser sheet.
NOTE: This study uses a 60 mm prime lens at its maximum aperture of f/2.8. - Connect the camera to the computer by using an Ethernet cable and turn on the camera control software (e.g., Phantom PCC 2.6); turn on the camera and connect it to the computer in the camera control software interface.
- Adjust the tripod to ensure that the field-of-view of the camera covers the pipeline-fluid-seabed interaction region; level the camera using the built-in bubble level on the tripod; tune the focus ring on the lens to ensure that the laser sheet is clear on the focal plane.
- Mount the lens with appropriate focal length on the high-speed camera. Screw the high-speed camera onto a height-adjustable tripod; adjust the camera to the level of the observation region with its axis perpendicular to the illuminated laser sheet.
5. Experimental setup optimization and calibration
- Add PIV seeding particles to the test section of the flume.
NOTE: The seeding particles used in this study were aluminum powders with a diameter of 10 μm and a specific density of 2.7. - Enhance the light intensity of the laser sheet if necessary.
- Verify the focus of the camera by observing the illuminated seeding particles on the laser sheet through a live camera view on the computer; fine-tune the focus ring, if necessary, to ensure that the seeding particles are sharp and in focus.
- Place a calibration ruler inside the field-of-view on the plane of the laser sheet and capture one calibration image.
NOTE: The adopted resolution of the image in this study was 1600 × 1200 pixels. - Select a proper sampling rate for data collection.
NOTE: The chosen sampling rate should ensure that the seeding particle displacement within a pair of images is less than 50% of the maximum interrogation window length. In this study, the maximum interrogation window size is 32 × 32 pixels and the adopted sampling rate is 200 frames per second. - Turn off the laser and camera when steps 5.1-5.5 are completed.
6. Running the experiment and data collection
- Place a transparent acrylic plate (20 mm thick) below the laser source and on the water surface, to suppress water surface fluctuations, and ensure tranquil optical access for the laser light.
- Turn on the servo motor to induce forced vibrations on the pipeline model.
NOTE: In this study, the induced frequency of the servo motor is f0 = 0.3 Hz. - Keep the vibration system running for (t =)1440 min to obtain a quasi-equilibrium scour hole beneath the vibrating pipeline.
- Turn on the laser and adjust the output power to the optimized intensity. Turn on the camera and camera control software and apply the calibrated settings to the camera. Turn off the background lights in the laboratory.
- Start recording the seeding particle-laden flow field image with the sampling rate selected in 5.6 by clicking the Capture Bottom in the camera software control software.
NOTE: For every single recording in this study, the camera storage allows 1,000 images to be captured. - Once the data collection is completed, review the recorded image quality and check if the seeding particle density per interrogation window (32×32 pixels) is greater than 8. Save the recorded file if satisfied, otherwise, the seeding density is increased by slowly injecting seeding solutions in the observation region, and repeat steps 6.3-6.5.
- Repeat steps 6.3-6.5 to collect more data sets.
NOTE: For this study, more than 20,000 images were taken to ensure that enough raw data are obtained for calculating the flow velocities, vorticities, turbulence, and near-boundary stresses. - Turn off the laser device, camera, and server motor when all the data collections are completed; turn on the background lights in the laboratory.
7. Data processing
- Open the software; click the File folder button on the toolbar and load the calibration image taken in step 5.4.
NOTE: Use the data processing program for pipeline displacement tracking and flow field calculations software (e.g., PISIOU). - Click the Scale setup button on the toolbar; measure a known distance on the calibration image to calculate the scale of the image.
NOTE: The calculated image scale was 0.1694 mm/pixel. - Click the Origin button on the toolbar; set the origin of the coordinates on each image.
- Extract the displacement time-series of the vibrating pipeline from the recorded images.
- Load the raw images taken in step 6. Then click on the Parameter panel, enter the number of data files and the sample rate.
- Apply the Low pass filter in the Image filter menu.
NOTE: This operation will allow the edge of the pipeline (target to be tracked) to be readily recognized on the processed images (see Figure 3a). - In the toolbar, click the PTV module. Then click Tracing point button, select the center point of the pipeline. Go to PTV tools, adjust Gamma, Light Gate and Median Filter to single out the pipeline outline in the image. Click the Object tracking button on the toolbar; select the target region (i.e. the pipeline) on the processed image and track the displacement of the vibrating pipeline from consecutive processed images; record the displacement time-series, η(t), of the vibrating pipeline for subsequent flow field data processes (see Figure 4).
- Export and save the pipeline displacement time-series data for further calculations.
- Determine instantaneous velocity fields from the recorded images.
- Go to PTV tools, click Default button to resume the raw image for subsequent PIV analysis. Deactivate the PTV module by clicking the PTV module. Open the Parameter panel on the toolbar; specify the velocity vector calculation parameter.
NOTE: In this study, a multi-pass iteration process is adopted as the interrogation windows, which started from 32 × 32 pixels, then passed with 16 × 16 pixels, and ended with 8 × 8 pixels; all passes use a 50% overlap between adjacent sub-windows. - Apply the Laplacian filter function in the Image filter menu to the raw images to highlight the seeding particles and filter out undesirable scattering light (see Figure 3c).
- Click the Boundary button on the toolbar, set the geometric mask on the images to exclude the seabed region for further calculation. Click Boundary Save button to save the boundary data.
- Click the Run button on the toolbar to calculate the instantaneous velocity fields for different vibrating phases using the cross-correlation method.
NOTE: In this study, a multi-time interval algorithm is adopted to reduce the bias error due to high velocity gradient in the flow field (see Figure 5). The adopted multiple-time intervals for cross-correlation calculations are Δt, 3Δt, 9Δt and 21Δt (Δt = 5 ms). The satisfactory correlation criterion is greater than 70%. - Export and save the instantaneous velocity fields data for further analysis.
- Go to PTV tools, click Default button to resume the raw image for subsequent PIV analysis. Deactivate the PTV module by clicking the PTV module. Open the Parameter panel on the toolbar; specify the velocity vector calculation parameter.
- Determine the phase-averaged velocity fields from the calculated instantaneous velocity fields with the algorithm as described in Newland 199429,30 and Hsieh 200828.
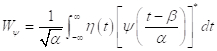
NOTE: The calculation procedures for this step is described as follows:- Apply the wavelet transform function to the displacement time-series, η(t), of the vibrating pipeline to obtain the instantaneous phase for each instantaneous velocity field. The wavelet transform function is defined as:
 (1)
(1)
where WΨ is wavelet coefficient; α and β are the scale and translation parameters, respectively; the function Ψ is the Morlet function and is calculated as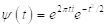 ; the superscript “*” denotes the complex conjugate. The instantaneous phases, Φ, of the vibrating pipeline that correspond to the different pipeline displacements can be calculated from:
; the superscript “*” denotes the complex conjugate. The instantaneous phases, Φ, of the vibrating pipeline that correspond to the different pipeline displacements can be calculated from:
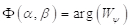 (2)
(2) - Average the instantaneous velocity fields with the same phase to obtain the phase-averaged velocity fields.
- Determine the flow vorticity, ω2, in the calculated phase-averaged velocity fields from:
 (3)
(3)
where and
and  are phase-averaged velocities along x and y directions.
are phase-averaged velocities along x and y directions.
- Apply the wavelet transform function to the displacement time-series, η(t), of the vibrating pipeline to obtain the instantaneous phase for each instantaneous velocity field. The wavelet transform function is defined as:
- Load the calculated phase-averaged velocity and vorticity data in Tecplot software for visualization.
- Determine the near-boundary shear and normal stresses from the calculated instantaneous velocity fields with the algorithm as described in Hsieh et al. 2016 9. The calculation procedures for this step is described as follows:
- Extract the near-boundary velocity data (0-5 mm above the seabed) from the calculated phase-averaged velocity flow fields.
- Compute the near-boundary shear stresses, ts and normal stresses, tn, along the scour profile (approximately 2 mm above the scour hole boundary) for different phases within one vibrating cycle. Note: The calculation equations are as follows:
 ,
,  (4)
(4)
where, μ = dynamic viscosity of the fluid (herein taken as 1×10-3 Pa∙s); up = near-boundary velocity parallel to the bed; un = near-boundary velocity perpendicular to the bed; n = normal distance from the bed.
- Load the calculated near-boundary shear and normal stresses data in a software (e.g., Tecplot) for visualization.
An example of the comparison between the raw image and processed image of the pipeline displacements tracking and instantaneous velocity calculation is shown in Figure 3. As shown in Figure 3b, the seeding particles and noise in the raw image are filtered out and the shining pipeline edge is retained to obtain the displacement time series. As shown in Figures 3c, light scatters/reflections around the seeding particles, pipeline edge and seabed surface are filtered out by the Laplacian filter. An example of the displacement time-series of the vibrating pipeline is shown in Figure 4. The vibration of the pipeline is almost sinusoidal, and the vibrating frequency and amplitude are 0.3 Hz and ~50 mm, respectively.
Figure 6 shows an example of the image of the quasi-equilibrium scour profile and vibrating pipeline at t = 1440 min, in which the origin of the coordinate (x–O–y) of this study is set at the intersection point of the original seabed surface and the pipeline vertical centerline. As shown in Figure 6, in addition to the seeding particles, very few suspended sediment particles can be observed in the flow; therefore, the raw image quality was not compromised. This also indicates that a quasi-equilibrium stage was reached for the pipeline scour process.
Examples of the visualized phase-averaged velocity field and vorticity dynamics are shown in Figure 7. It should be noted that because of the shadow of the pipeline during the PIV measurements, the region on the left side of the pipeline has no data (see subplots in Figure 7). As seen in Figure 7, nine discrete phases of the flow field within one cycle of vibration are presented. During the pipeline falling phases (0 ≤ t0/T < 0.5, where T is the vibration period and t0 is the time varies from 0 to T), a pair of vortices with symmetrical patterns is generated from the shear layers on both sides of the vibrating pipeline. Immediately after the pipeline has reached the scour trench bottom (t0/T = 4/8), the counter-clockwise vortex is distorted and sucked into the scour trench as the pipeline rises from the seabed. For the period of the pipeline ascending phases (0.5 ≤ t0/T < 1), another pair of vortices with opposite rotating directions to those in the descending phase is symmetrically generated around the top edge of the pipeline. For a better observation of the flow dynamics in Figure 7, a corresponding video (Video 1) made of 72 phases (frames) of flow fields for one cycle of pipeline vibration is provided.
An example of the near-boundary shear stresses, Ts and normal stresses, Tn evolution along the scour profile within one vibrating cycle is presented in Figure 8. Since the flow field is symmetrical about the y axis, the near-boundary shear stresses and normal stresses presented in this study are confined to the right half of the scour profile (0 < x < 5). As shown in Figure 8, these two stresses are normalized by the value of the critical bed shear stress, Tc (obtained from Shields' curve as 0.243 Pa) of the sand particles on a plane bed condition. The absolute values of Ts and Tn within the scour trench and beneath the vibrating pipeline increase significantly when the pipeline is falling to the bed or ascending from the bed. The regions where Ts and Tn exhibit the maximum and minimum values are consistent with the evolution of flow fields between the vibrating pipeline and scour boundary as shown in Figure 7.
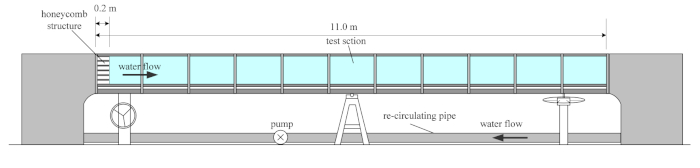
Figure 1: Schematic of the experimental flume. Please click here to view a larger version of this figure.
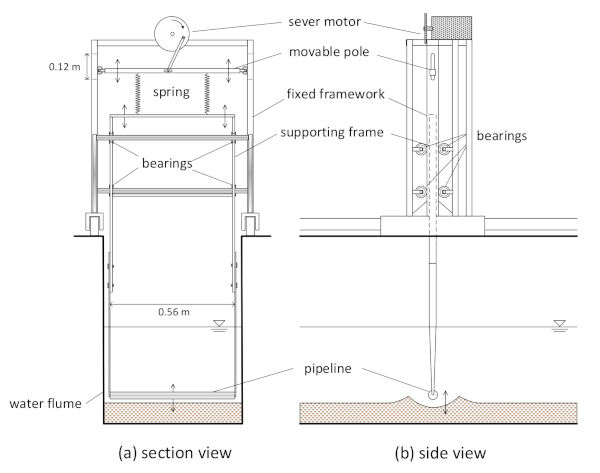
Figure 2: Schematic of the pipeline model and vibration system set-up. (a) Section view, (b) Side view. This figure has been modified from8. Please click here to view a larger version of this figure.
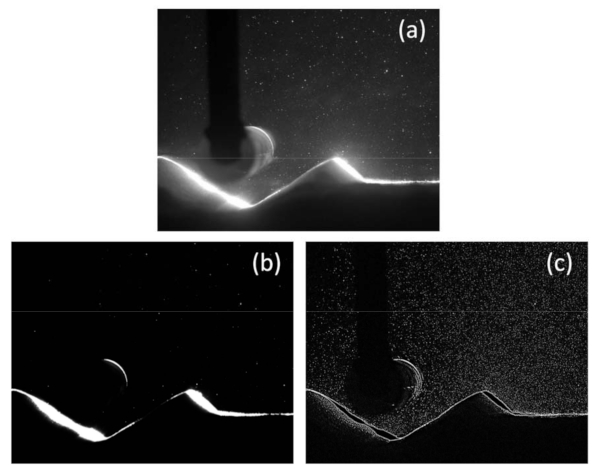
Figure 3: Example of the comparison between raw and processed images. (a) the raw image, (b) the processed image for pipeline displacements tracking, and (c) the processed image for instantaneous velocity calculation. Please click here to view a larger version of this figure.
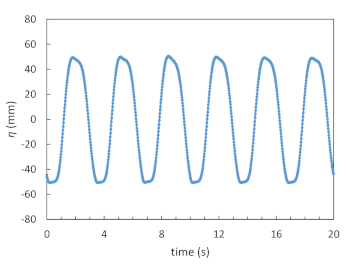
Figure 4: Example of the displacement time-series of vibrating pipeline at t = 1440 min. Please click here to view a larger version of this figure.
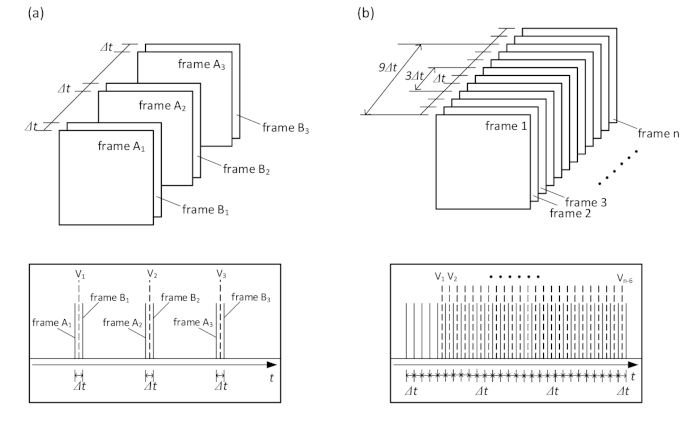
Figure 5: Comparison between single-time and multi-time interval cross-correlation algorithm. This figure is reproduced from9. Please click here to view a larger version of this figure.
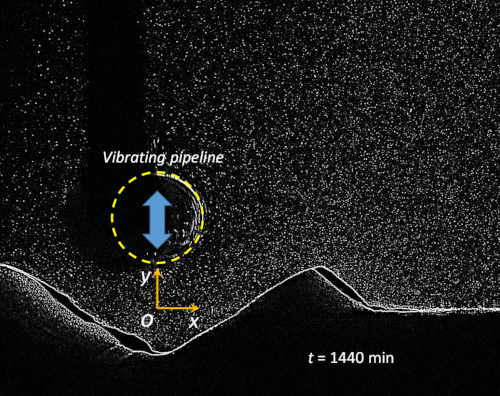
Figure 6: Example image of the quasi-equilibrium scour profile at t = 1440 min. Please click here to view a larger version of this figure.
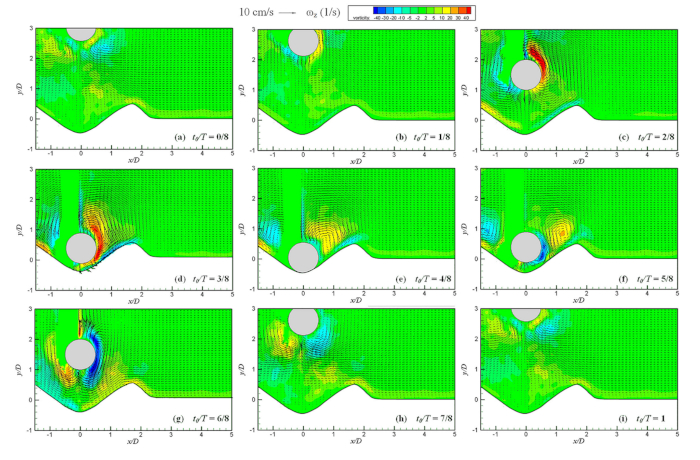
Figure 7: Examples of visualized phase-averaged velocity field and vorticity dynamics. This figure is reproduced from8. Please click here to view a larger version of this figure.
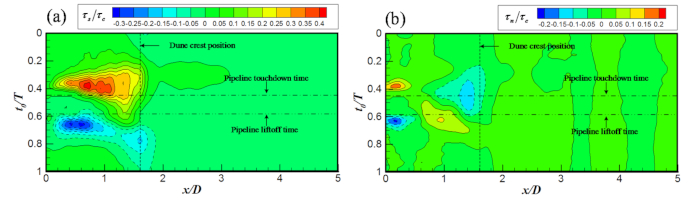
Figure 8: Example of evolutions of ts and tn along the scour profile within one vibrating cycle. The touchdown and liftoff times refer to the times when the bottom of the pipeline just touches and rises from the scour hole boundary, respectively. This figure is reproduced from8. Please click here to view a larger version of this figure.
Video 1: Flow field evolution around the vibrating pipeline within the equilibrium scour hole. The video is made from 72 phases (frames) of flow fields for one cycle of pipeline vibration. This video is reproduced from8. Please click here to view this video. (Right-click to download.)
