A trapezoidal fish-inspired artificial pectoral fin was cast in two different materials (PDMS 10:1 and 20:1, both mixed with fluorescent dye) out of a mold, each with a rigid leading-edge spar inserted into the leading quarter chord (Figure 2 and Figure 3). Tensile testing of the two fin materials (Figure 3) yielded elastic moduli of 0.38 MPa and 0.82 MPa for the PDMS 20:1 and PDMS 10:1 fins, respectively, with an R2 of 0.99 for both measurements (see Supplementary Figure 2 for the corresponding stress-strain curves).
To capture the motion of the fin, the camera was placed such that the micrometer-to-pixel ratio in the focused field of view was 125 µm/pixel. A delay generator was wired and programmed to trigger the laser and camera at 30 equally spaced time intervals per fin stroke based on a single trigger signal at the midpoint of each fin stroke. The fin was positioned such that the laser sheet passed through a chordwise section of the fin. This was done for eight spanwise positions from 1.876 cm to 13.132 cm from the root of the fin geometry (Figure 2).
For each cross-section, 200+ images were obtained for each of 30 stroke positions (phases). The programmed kinematics yielded a stroke amplitude of ±43° and a pitch amplitude of ±17° (Figure 7A,B). Due to the opaque rigid spar, the fin cross-section was not visible at every time step (Figure 6), but these occlusions were sparse and did not affect the overall 3D reconstructions. Following the image sorting, averaging, thresholding, binarization, and tracing, a 3D representation was constructed. This 3D reconstruction was compared with the results of the FSI model and the structure of a rigid fin model. The LE position in the flexible cases was assumed to be the same as that of the LE in the rigid fin for the same shape. However, the substantial reduction in the overall stiffness going from the rigid to the soft fin resulted in spanwise loading, adding a non-negligible deflection along with the LE for the present design.
Figure 7C,D illustrates these comparisons at two positions in the stroke, one in the middle of the upstroke (t = 0 s) and one in the middle of the downstroke (t = 0.567 s). The figure demonstrates the chordwise curvature induced by fluid pressure on the PDMS 10:1 fin, leading to a mean normalized chord displacement of the trailing edge at the longest chord section of displacement/chord (d/c) = 0.36 in mid upstroke and d/c = 0.33 in the mid downstroke, as measured in the experiments. This compares with d/c = 0.44 in mid upstroke and d/c = 0.39 in mid downstroke from the CFD simulations with the FSI model. The results also demonstrate some spanwise deflection along the leading edge in the experiments, which was not modeled for the simulations.
Further comparisons were made between the shape deformations of the PDMS 10:1 and PDMS 20:1 fins (Figure 8A). At the middle of upstroke (t = 0 s,) the trailing edge displacement at the longest chord section was measured as d/c = 0.36 for the PDMS 10:1 fin and d/c = 0.51 for the PDMS 20:1. Finally, Figure 8B shows the reconstructed 3D fin shapes from the PLIF, FSI, and rigid cases in the mid-upstroke (t = 0.567s). This demonstrates the capability of the present technique to provide high-fidelity validation for FSI simulations.
In addition to measurements of the deformation time-history, as detailed previously, direct measurements of thrust and mechanical power provide valuable data for analyzing fin propulsive performance. For the kinematics presented, the PDMS 10:1 fin produced a stroke averaged thrust of Fx = 0.51 N, measured with a strain gauge load cell, and an average total power of Pm = 2.38 W, measured with current and voltage sensors. Thrust and hydrodynamic power computed from the CFD simulation for the PDMS 10:1 field yielded Fx = 0.50 N and Ph = 0.49 W. The PDMS 20:1 fin produced an experimentally measured stroke averaged thrust of Fx = 0.48 N and an average power of Pm = 2.30 W. The hydrodynamic power comprised approximately 20% of the total power, while mechanical losses in the motor were a larger contributor to power consumption. As such, the differences in hydrodynamic power and efficiencies could have varied significantly between fins of different material properties, but the total power remained relatively consistent.
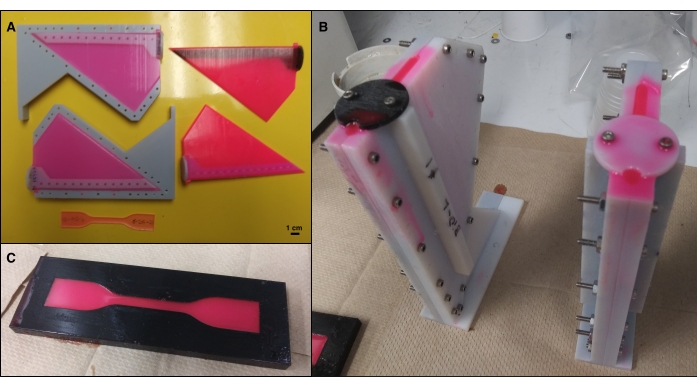
Figure 1: Custom plastic molds to cast the fins (A and B) and tensile test specimens (C). The molds and rigid spars for the fins were 3D printed in rigid plastic (black and gray), and the fins and tensile test specimens were cast from PDMS mixed with a fluorescent dye (pink). Please click here to view a larger version of this figure.
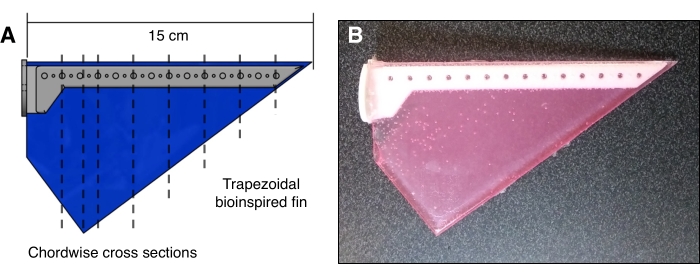
Figure 2: Bioinspired fin planform geometry used in experiments. (A) CAD model illustrating the rigid spar (gray) and PDMS fin (blue), with dashed black lines indicating the chordwise cross-sections used in planar laser-induced fluorescence (PLIF) experiments. (B) Fluorescent PDMS fin (pink) with a rigid plastic spar (white). Please click here to view a larger version of this figure.
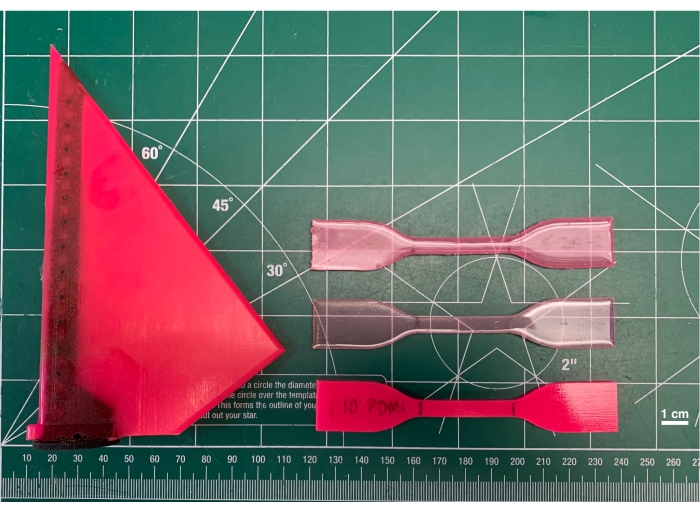
Figure 3: Example of a finished fin and tensile testing specimens. Mold-casted PDMS fin with a black rigid spar (left) and three examples of Type IV specimens (right) for tensile testing to obtain the material properties of each batch of fluorescent PDMS. Please click here to view a larger version of this figure.
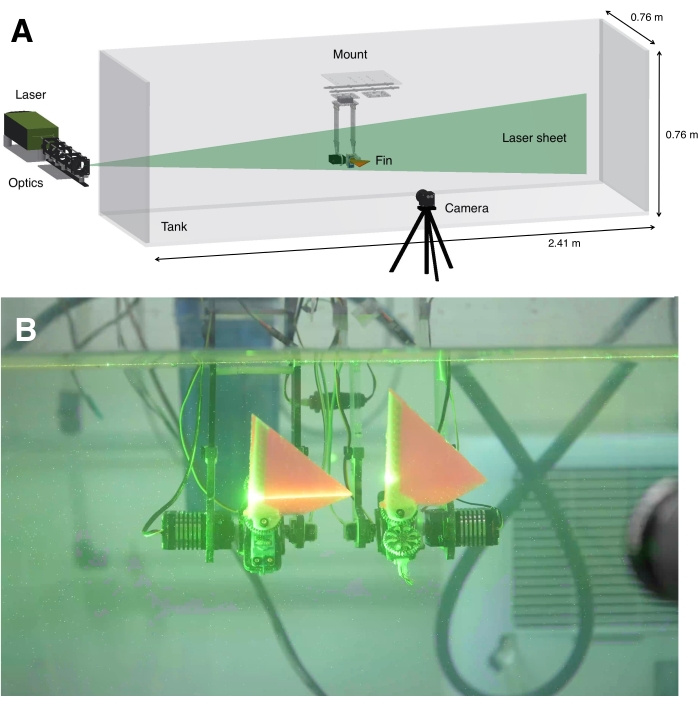
Figure 4: Experimental setup. (A) 3D CAD view of the experimental setup with the laser and optics, green laser sheet, tank, fin mounted to a platform, and camera. (B) An example image showing the mounted fins in the tank, with the laser turned on and a camera visible on the far right. Although two fins are shown in this tandem fin setup, which can obtain the kinematics for future studies of fin-fin interactions, PLIF measurements were recorded for only the front fin in this study. Furthermore, the image contains ambient light to visualize the setup, but the ambient lights were turned off during all experiments to improve the signal-to-noise ratio. Please click here to view a larger version of this figure.
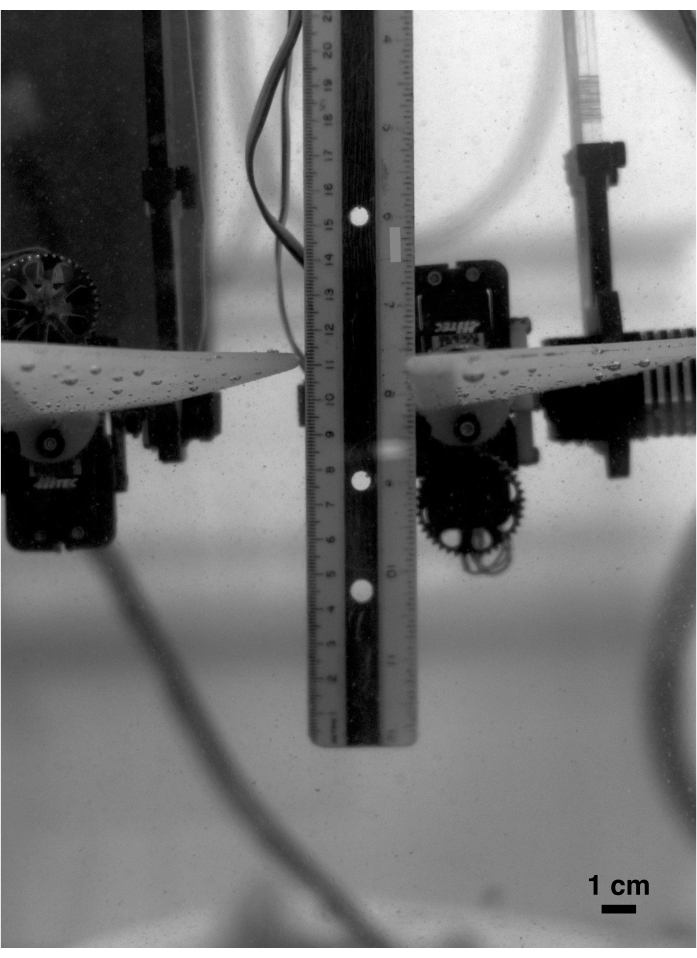
Figure 5: Calibration image. Before running the experiments, calibration images were obtained using a standard ruler to measure the micrometer-to-pixel ratio. Please click here to view a larger version of this figure.
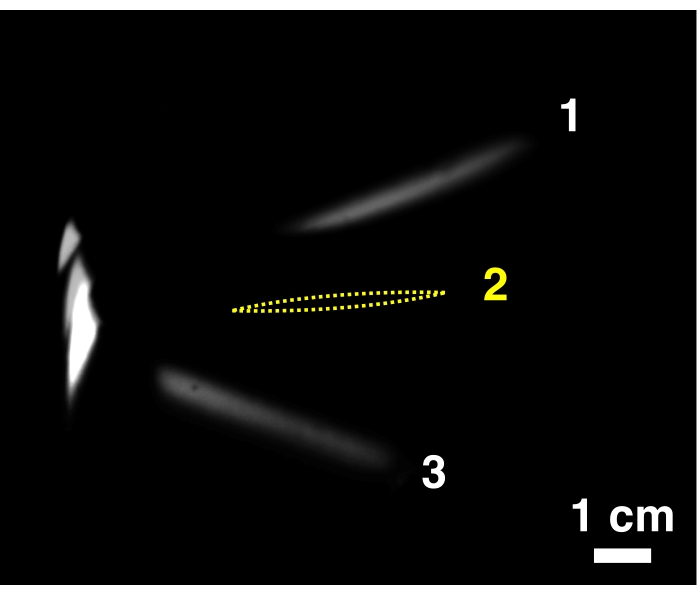
Figure 6: Fin images of three time steps overlaid, with a representative example of fin occlusion at one time step. The fin cross-section is visible in Steps 1 and 3, whereas the opaque rigid spar occludes the fin at Step 2, where an estimate of the fin position is drawn in yellow. Please click here to view a larger version of this figure.
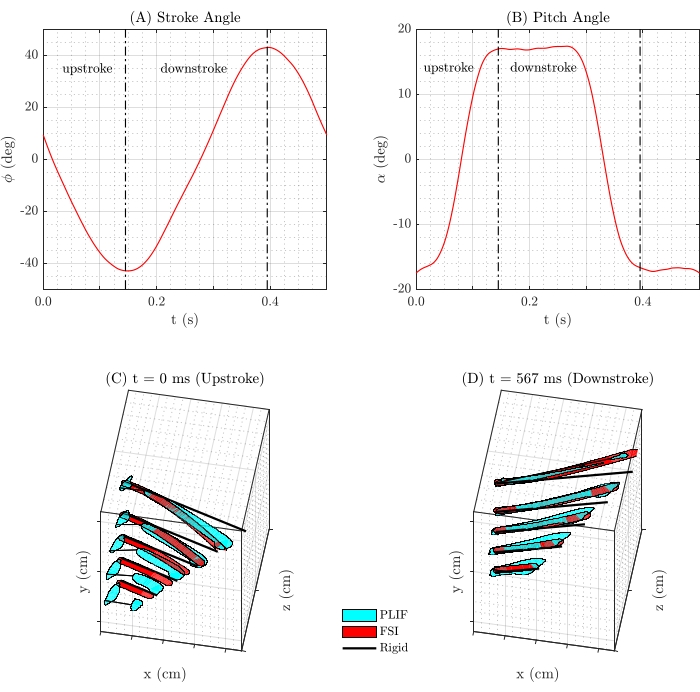
Figure 7: Fin kinematics. (A) The stroke amplitude (±43°) and (B) pitch amplitude (±17°) of the fin kinematics over time. A comparison of the PDMS 10:1 fin (light blue), FSI data of the PDMS 10:1 fin (red), and rigid fin (black) to illustrate the difference in fin positions at two time-steps in the (C) upstroke and (D) downstroke. Please click here to view a larger version of this figure.
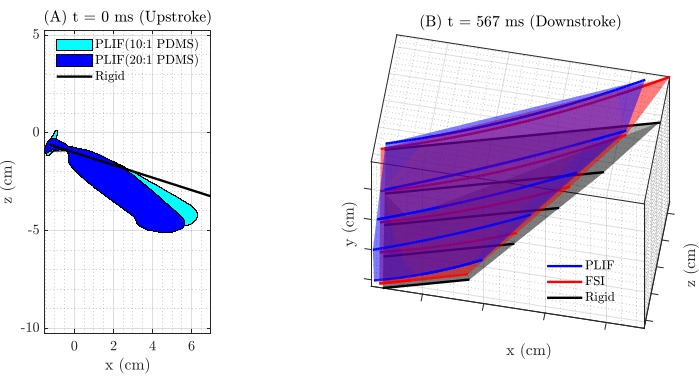
Figure 8: Comparison of fin deformation. (A) A comparison of the PLIF method of obtaining fin kinematics at one example time-step to demonstrate the effects of stiffness on fin deformation. The PLIF measurement for the more compliant 20:1 PDMS fin (dark blue) shows more deformation than the more rigid 10:1 PDMS fin (light blue), and both show substantial differences from a rigid fin (black). (B) 3D reconstructed fin shapes from the PLIF for 10:1 PDMS, FSI for 10:1 PDMS, and rigid cases at one example time-step to compare the surface fits. Please click here to view a larger version of this figure.
Supplementary Figure 1: Software interface for the delay generator. The user interfaces for software to control the delay generator, with settings to produce PLIF images at 30 Hz by coordinating the timing of the two laser heads and camera with the fin trigger. Please click here to download this File.
Supplementary Figure 2: Tensile test results for PDMS. Stress-strain curves for two mixes of PDMS (20:1, a more flexible mix with an elastic modulus of 0.38 MPa, and 10:1, a more rigid mix with an elastic modulus of 0.82 MPa). Please click here to download this File.
Supplementary Coding File 1: "Assembly2.stl" is an assembly of files to 3D print the custom fin molds. Please click here to download this File.
Supplementary Coding File 2: "SimpleFin-AR3Bio-soft-v2-fin2c.stl" is the STL file to print the fin insert, a rigid portion of the fin that serves as the attachment to the servo. Please click here to download this File.
Supplementary Coding File 3: "SimpleFin-AR3Bio-soft-v2b-moldL.stl" is the left half of the 3D print mold for the flexible fin. Please click here to download this File.
Supplementary Coding File 4: "SimpleFin-AR3Bio-soft-v2b-moldR.stl" is the right half of the 3D print mold for the flexible fin. Please click here to download this File.
Supplementary Coding File 5: "ASTM-TestPiece-Mold-v2b-TypeIV_Flat_DIN53504.stl" is the 3D print mold to create Type IV specimens for tensile testing. Please click here to download this File.
