A possible implementation of the system described above is shown in Figure 1; this implementation allows the user to navigate in augmented reality through brain activity. The flickering icons on the smart glasses display correspond to actions for the application (Figure 1A), and, thus, these glasses represent a substitute for a traditional interface based on button presses or a touchpad. The efficacy of such an interaction is strictly related to the successful classification of the potentials evoked by the flickering. To achieve this aim, a metrological characterization was first carried out for the system18, and then human users were involved in an experimental validation.
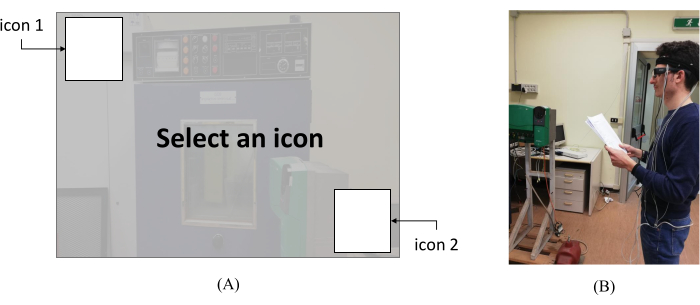
Figure 1: Possible implementation of the proposed brain-computer interface. (A) Representation of what the user sees through the smart glasses, namely the real scenario and the visual stimuli; (B) a user wearing the hands-free system. Please click here to view a larger version of this figure.
The electroencephalograph was characterized with respect to linearity and magnitude error. Linearity was assessed at 20 Hz through measures conducted with a sinusoidal input signal to the device tested at seven different amplitudes (10 µV, 20 µV, 30 µV, 40 µV, 60 µV, 80 µV, and 100 µV). By plotting the voltage of the electroencephalograph as a function of the input voltage, Figure 2A highlights the clear linear behavior of the electroencephalograph. Linearity was also confirmed by a Fisher's test for the goodness of the linear fit. However, the figure also indicates some gain and offset error. These errors were tested by fixing the amplitude at 100 µV and varying the frequency. The results are reported in Figure 2B and confirm the magnitude error with respect to the nominal gain.
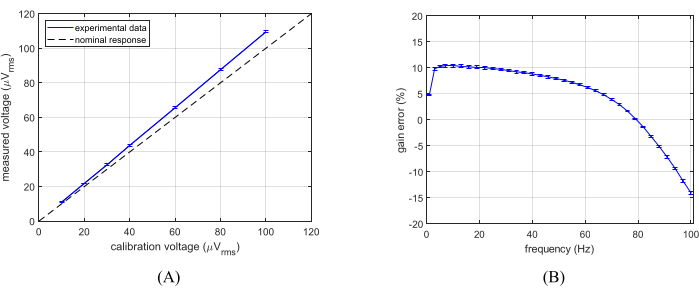
Figure 2: Results of the low-cost electroencephalograph characterization. (A) Linear errors; (B) magnitude errors. The number of samples for each measuring point was 4,096. A more detailed discussion can be found in Arpaia et al.18. Please click here to view a larger version of this figure.
Finally, the flicker of the smart glasses was measured to highlight eventual deviations from the nominal square wave path. Such deviations were especially visible in the amplitude spectrum of the 12 Hz flickering (Figure 3B). However, all these errors can be considered or eventually compensated, thus demonstrating the feasibility of using consumer-grade material for the SSVEP-BCI system.
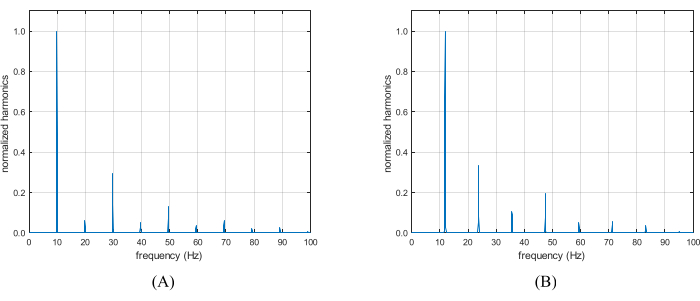
Figure 3: Results of the characterization of the commercial smart glasses in terms of the amplitude spectrum of the flickering buttons. (A) Flickering at 10 Hz; (B) flickering at 12 Hz. A more detailed discussion can be found in Arpaia et al.18. Please click here to view a larger version of this figure.
Regarding the experimental validation, 20 subjects (7 female) took part in the campaign. Each subject underwent 24 trials with two simultaneous flickering icons on the smart glasses display. The subject had to stare at one of the two randomly ordered icons, which each had a different frequency (10 Hz flickering or 12 Hz flickering). The randomness of which frequency the subjects stared at first was guaranteed by letting them decide the icon to stare at without any predefined criteria. Once 12 trials were completed at a specific frequency, the subject was then asked to focus on the icon with the other frequency for the remaining trials. In the exploited application, the 12 Hz flickering icon appeared on the top-left corner while the 10 Hz flickering icon appeared on the bottom-right corner. A single trial lasted 10.0 s, and a few seconds (of random duration) passed between consecutive trials. Smaller time windows could be then analyzed offline by cutting the recorded signals.
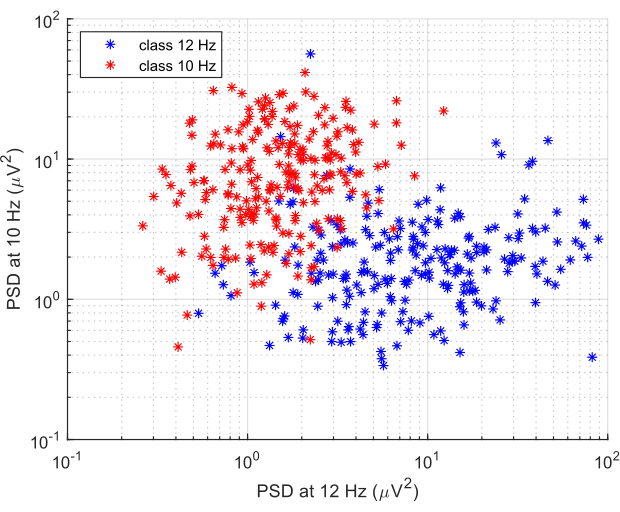
Figure 4: Representation of the signals measured during visual stimulation in the features domain. The signals associated with the 12 Hz flickering stimuli (class 12 Hz) are represented in blue, while the signals associated with the 10 Hz flickering stimuli (class 10 Hz) are represented in red. Features from all the subjects are considered here. Please click here to view a larger version of this figure.
Figure 4 reports the 10 s signals represented by the two power spectral density features, namely at 12 Hz and 10 Hz. A single dot in two dimensions corresponded to a single trial. The dots corresponding to the two different flickering frequencies were distinguished by their color. Hence, the two classes were separated, although an overlap between the two classes existed, which may have caused misclassification. Classification results were obtained with a four-fold cross-validation, so that the data were split four times into 18 trials for training and 6 trials for validation. The data confirmed that, in the 10 s stimulation case (Table 1), 8 subjects out of 20 reached 100% accuracy, but for other subjects, the classification accuracy was as low as 65%-70%. Meanwhile, one subject reached 100% with a 2 s stimulation (obtained by cutting the signals in post processing), and a relevant number of subjects reached random (50%) classification accuracy. The data from all the subjects were considered as a whole, and the classification accuracy was obtained. The performance was also assessed in terms of the information transfer rate (ITR), which was above 30 bits/min on average. These results were enhanced by considering the power spectral densities at 20 Hz and 24 Hz. Table 2 shows that they increased or remained constant, and at least in the 10 s stimulation case, the standard deviation diminished, thus indicating less dispersion in the classification performance for different subjects. Finally, the classification accuracy was recalculated for all the subjects in this four-features case, and it was found again that they were close to the mean accuracies.
| Subject | 10 s Stimulation Accuracy % | 2 s Stimulation Accuracy % |
| Tutti | 94.2 | 77.5 |
| S1 | 100 | 100 |
| S2 | 100 | 98.8 |
| S3 | 100 | 92 |
| S4 | 100 | 92 |
| S5 | 100 | 88 |
| S6 | 100 | 87 |
| S7 | 100 | 87 |
| S8 | 100 | 64 |
| S9 | 97.9 | 57 |
| S10 | 96.7 | 88.8 |
| S11 | 96 | 64 |
| S12 | 95.8 | 78 |
| S13 | 95.4 | 83 |
| S14 | 95.4 | 53 |
| S15 | 94 | 80 |
| S16 | 92.9 | 61 |
| S17 | 91 | 78 |
| S18 | 89.6 | 61 |
| S19 | 81 | 52 |
| S20 | 71 | 49 |
| MEAN | 94.9 | 76 |
| STD | 7.4 | 16 |
Table 1: Cross-validation accuracy in classifying the SSVEP-related EEG signals. For each subject, the results associated with a 10 s stimulation are compared with the results associated with a 2 s stimulation. The mean accuracy among all the subjects is reported, as well as the accuracy obtained by considering all the subjects together (row all).
| 10 s Stimulation (Mean accuracy ± std) % | 10 s Stimulation (Mean accuracy ± std) % | |
| 2D Case | 94.9 ± 7.4 | 76 ± 16 |
| 4D Case | 97.2 ± 4.3 | 76 ± 15 |
Table 2: Comparison of the classification performance when considering two PSD features (2D case) versus four PSD features (4D case) for the SSVEP-related EEG data. A 10 s stimulation is compared to a 2 s one by reporting the mean cross-validation accuracies and their associated standard deviations.
