बोध और परपेचुअल सीखने के अध्ययन के लिए वस्तुओं और वस्तु श्रेणियाँ बनाना
Summary
हम ठीक से परिभाषित फीचर बदलाव के साथ प्राकृतिक 3-D वस्तुओं और वस्तु श्रेणियों बनाने के लिए एक उपन्यास पद्धति का वर्णन. हम morphogenesis और उपन्यास, प्राकृतिक आभासी 3-D वस्तुओं और वस्तु श्रेणियों है कि फिर दृश्य छवियों या haptic वस्तुओं के रूप में गाया जा सकता है बनाने के लिए मनुष्य का बढ़ाव के जैविक प्रक्रियाओं के सिमुलेशन का उपयोग करें.
Abstract
In order to quantitatively study object perception, be it perception by biological systems or by machines, one needs to create objects and object categories with precisely definable, preferably naturalistic, properties1. Furthermore, for studies on perceptual learning, it is useful to create novel objects and object categories (or object classes) with such properties2.
Many innovative and useful methods currently exist for creating novel objects and object categories3-6 (also see refs. 7,8). However, generally speaking, the existing methods have three broad types of shortcomings.
First, shape variations are generally imposed by the experimenter5,9,10, and may therefore be different from the variability in natural categories, and optimized for a particular recognition algorithm. It would be desirable to have the variations arise independently of the externally imposed constraints.
Second, the existing methods have difficulty capturing the shape complexity of natural objects11-13. If the goal is to study natural object perception, it is desirable for objects and object categories to be naturalistic, so as to avoid possible confounds and special cases.
Third, it is generally hard to quantitatively measure the available information in the stimuli created by conventional methods. It would be desirable to create objects and object categories where the available information can be precisely measured and, where necessary, systematically manipulated (or ‘tuned’). This allows one to formulate the underlying object recognition tasks in quantitative terms.
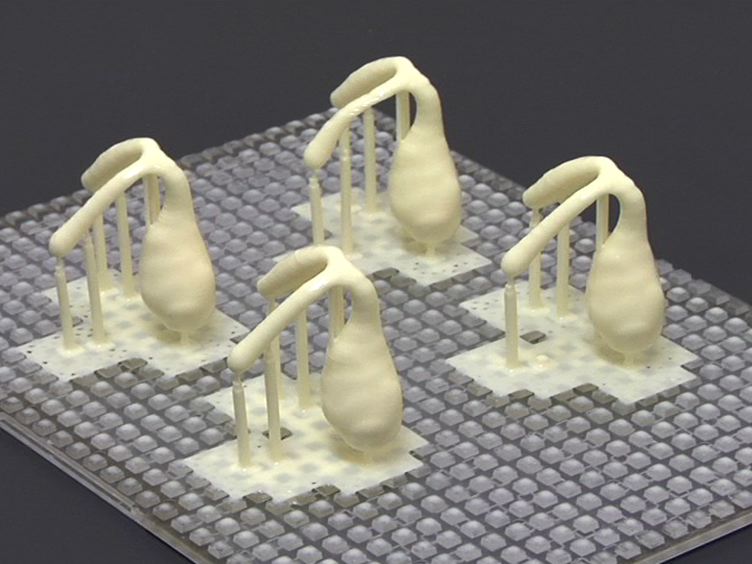
Here we describe a set of algorithms, or methods, that meet all three of the above criteria. Virtual morphogenesis (VM) creates novel, naturalistic virtual 3-D objects called ‘digital embryos’ by simulating the biological process of embryogenesis14. Virtual phylogenesis (VP) creates novel, naturalistic object categories by simulating the evolutionary process of natural selection9,12,13. Objects and object categories created by these simulations can be further manipulated by various morphing methods to generate systematic variations of shape characteristics15,16. The VP and morphing methods can also be applied, in principle, to novel virtual objects other than digital embryos, or to virtual versions of real-world objects9,13. Virtual objects created in this fashion can be rendered as visual images using a conventional graphical toolkit, with desired manipulations of surface texture, illumination, size, viewpoint and background. The virtual objects can also be ‘printed’ as haptic objects using a conventional 3-D prototyper.
We also describe some implementations of these computational algorithms to help illustrate the potential utility of the algorithms. It is important to distinguish the algorithms from their implementations. The implementations are demonstrations offered solely as a ‘proof of principle’ of the underlying algorithms. It is important to note that, in general, an implementation of a computational algorithm often has limitations that the algorithm itself does not have.
Together, these methods represent a set of powerful and flexible tools for studying object recognition and perceptual learning by biological and computational systems alike. With appropriate extensions, these methods may also prove useful in the study of morphogenesis and phylogenesis.
Protocol
Representative Results
Discussion
VM और उपाध्यक्ष के संज्ञानात्मक विज्ञान अनुसंधान में उपयोगिता
हम पहले L9 ,10,12 14 विस्तार में VM और उपाध्यक्ष की उपयोगिता में वर्णित है. संक्षेप में, वीएम, विशेष रूप से डिजिटल भ्रूण पद्धति, उपयोगी है क्योंकि यह उपन्यास बनाने के लिए एक सैद्धांतिक और लचीला तरीका है, लेकिन प्राकृतिक 3-D 14 वस्तुओं प्रदान करता है. इसी तरह, उपाध्यक्ष बनाने प्राकृतिक 9,10,12,13 श्रेणियों के एक सैद्धांतिक विधि प्रदान करता है. यह है कि वस्तु वी.पी. प्रकृति में तथ्य यह है कि श्रेणियों के लिए प्रकृति में श्रेणीबद्ध हो जाते हैं, और भीतर और श्रेणियों में सुविधा विविधताओं वर्गीकृत करने के लिए experimenter और एल्गोरिदम की स्वतंत्र रूप से उठता सहित वस्तु श्रेणियों, साथ शेयर कई सुविधाओं के द्वारा उत्पन्न श्रेणियों टिप्पण लायक है उन्हें 39.
वर्तमान सीमाओं और भविष्य के निर्देश
भविष्य के काम के लिए तीन हमारे प्रोटोकॉल और दिशाओं की वर्तमान सीमाओं वे सुझावविशेष रूप से उल्लेखनीय हैं: पहला, VM और उपाध्यक्ष दोनों जैविक प्रक्रियाओं अनुकरण. जबकि हम बताते हैं कि गैर जैविक आभासी वस्तुओं इन प्रक्रियाओं के लिए substrates के रूप में इस्तेमाल किया जा सकता है, अंतर्निहित प्रक्रिया अभी भी कर रहे हैं biologically प्रेरित. हालांकि, प्राकृतिक वस्तुओं – जैविक और गैर जैविक समान आकार गैर जैविक बलों के कारण परिवर्तन से गुजरना. उदाहरण के लिए, चट्टानों कटाव या अवसादन के रूप में भूवैज्ञानिक प्रक्रियाओं की वजह से आकार में बदल सकते हैं. रॉक की नई श्रेणियों के अन्य ऐसे भूवैज्ञानिक प्रक्रियाओं से उत्पन्न हो सकती है. यह अपेक्षाकृत उपलब्ध आकार परिवर्तन एल्गोरिदम के प्रदर्शनों की सूची में इन प्रक्रियाओं को शामिल करने के लिए स्पष्ट किया जाना चाहिए.
हमारे प्रोटोकॉल का दूसरा प्रमुख सीमा है कि गतिशील आकार में परिवर्तन के मौजूदा प्रदर्शनों की सूची बल्कि सीमित है. यह आकार में परिवर्तन का एक बड़ा जैविक गति, या हवा, पानी या गुरुत्वाकर्षण के रूप में बाहरी ताकतों के कारण गति के रूप में, सरणी को शामिल करने के लिए वांछनीय है. हमें उम्मीद है कि यह wilमैं अपेक्षाकृत सीधा करने के लिए जैसे गतिशील आकार में परिवर्तन को लागू करने के लिए जाना जाता कंप्यूटर ऐनिमेशन एल्गोरिदम को सहन करने के लिए लाने के लिए हो सकता है.
हमारे प्रोटोकॉल के 3 प्रमुख सीमा है कि VM वर्तमान में कई अन्य में जाना जाता है, सबसे विशेष रूप से, 36 gastrulation morphogenetic प्रक्रियाओं को शामिल नहीं करता है. यह भी तथ्य यह है कि पौधों में morphogenesis पूरी तरह से विकास द्वारा मध्यस्थता है कम या कोई सेल संभव आंदोलन के साथ, के रूप में कुछ ज्ञात कमी, सेल 36 दीवारों की वजह से, को शामिल करने में विफल रहता है. इसी तरह, उपाध्यक्ष अन्य आनुवंशिक 40 बहाव के रूप में जाना जाता वंशावली प्रक्रियाओं शामिल नहीं है. इन सीमाओं को संबोधित बहुत मदद कर सकता है विकास, पारिस्थितिकी और विकासवादी सिमुलेशन में हमारे प्रोटोकॉल के उपयोग की सुविधा होगी.
Divulgazioni
The authors have nothing to disclose.
Acknowledgements
इस काम के हिस्से में अमेरिकी सेना अनुसंधान प्रयोगशाला और अमेरिकी सेना के अनुसंधान कार्यालय अनुदान W911NF1110105 और NSF अनुदान IOS-1147097to जे हेगड़े द्वारा समर्थित किया गया. समर्थन भी जॉर्जिया स्वास्थ्य विज्ञान विश्वविद्यालय के विजन डिस्कवरी संस्थान से एक पायलट जे हेगड़े अनुदान द्वारा प्रदान किया गया. डैनियल Kersten N00014-05-1-0124 ONR और NIH R01 EY015261 अनुदान द्वारा समर्थित किया गया और भाग में WCU (वर्ल्ड क्लास यूनिवर्सिटी) कोरिया की नेशनल रिसर्च फाउंडेशन के माध्यम से शिक्षा, विज्ञान और प्रौद्योगिकी मंत्रालय द्वारा वित्त पोषित प्रोग्राम (R31 10,008 ). Karin Hauffen अमेरिकी सेना के अंडर ग्रेजुएट रिसर्च शिक्षुता कार्यक्रम (URAP) द्वारा समर्थित किया गया.
Materials
| Name of toolkit/equipment | Company / Author | Catalogue # | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. |
Riferimenti
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Fahle, M., Poggio, T. . Perceptual Learning. , (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a “Greeble” expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Bart, E., Hegdé, J., Kersten, D. Fragment-based learning of visual categories. , 121-12 (2008).
- Ball, P. . Nature’s patterns : a tapestry in three parts. , (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. . Numerical geometry of non-rigid shapes. , (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. . Pattern classification. , (2001).
- Bishop, C. M. . Pattern recognition and machine learning. , (2006).
- Theodoridis, S., Koutroumbas, K. . Pattern recognition. , (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , (2011).
- Tuffery, S. . Data mining and statistics for decision making. , (2011).
- Crawley, M. J. . Statistical Computing: An Introduction to Data Analysis using S-Plus. , (2002).
- Venables, W. N., Ripley, B. D. . Modern Applied Statistics with S. , (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. . Warping and morphing of graphical objects. , (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. . Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. . Computer graphics. , (2011).
- Lengyel, E. . Mathematics for 3D game programming and computer graphics, third edition. , (2011).
- Gilbert, S. F. . Developmental biology. , (2010).
- Gilbert, S. F., Epel, D. . Ecological developmental biology : integrating epigenetics, medicine, and evolution. , (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. . Evolution. , (2009).