कार्य विशेष कार्यों के बचपन के दौरान सहज आंदोलनों से उभरने। ऐसा लगता है कि कार्य विशेष कार्यों के लिए एक खोज-सीखने की प्रक्रिया 1,2 के माध्यम से उभरने का प्रस्ताव किया गया है। वे अनायास कदम है और वातावरण में उपन्यास प्रभाव का उत्पादन जो कार्यों का पता लगाने के रूप में कार्य शिशुओं द्वारा की खोज कर रहे हैं। शिशुओं उनके कार्यों और उनके आसपास की दुनिया पर उनके प्रभाव के बीच कनेक्शन का फायदा उठाने के रूप में कार्य विशेष के कार्यों उभरेगा। हालांकि, छोटे शिशुओं का पता लगाने और कार्य विशेष कार्रवाई करने के लिए उनकी सहज आंदोलनों को संशोधित करने के लिए सीखने के लिए है कि शोषण सटीक प्रक्रियाओं के बारे में जाना जाता है। यहाँ एक विधि का वर्णन किया गया है, जिसमें 3-4 महीने पुराने शिशुओं खोज के द्वारा एक कार्य जानने के लिए और उनके पैर आंदोलनों सीखने की प्रक्रिया है जिसका अंदाजा कब्जा कर रहे हैं।

चित्रा 1: शिशु मोबाइल कार्य सक्रिय लात मार रहा है। </यह आभासी दहलीज (लाल धराशायी लाइन) को पार कर जब strong> प्रत्येक पैर (पीला सर्कल) की कठोर शरीर से जुड़ी केन्द्र प्रकाश उत्सर्जक डायोड (एलईडी) मोबाइल सक्रिय हो जाता है। पुन: मुद्रित सार्जेंट एट अल से अनुमति के साथ। 3
इस खोज-शिक्षण कार्य शिशुओं 3 की निर्दिष्ट पैर कार्रवाई के आधार पर संगीत घूमता है और निभाता है कि एक शिशु सक्रिय मोबाइल का उपयोग करता है। मोबाइल के तहत लापरवाह रखा शिशुओं एक आभासी सीमा पार खड़ी (चित्रा 1) अपने पैरों को ले जाकर इसे सक्रिय। शिशुओं स्वतंत्र रूप से अपने पैर कार्यों 'शिशुओं पैर आंदोलनों सीखने की प्रक्रिया की मात्रा का ठहराव के लिए अनुमति एक प्रस्ताव पर कब्जा प्रणाली का उपयोग कर ट्रैक कर रहे हैं, मोबाइल को सक्रिय पता चलता है कि के रूप में यह प्रतिमान है कि आप में अनूठा है।
प्रयोगात्मक प्रोटोकॉल डेटा संग्रह के दो दिनों के शामिल हैं। 1 दिन एक शिशु अनायास kicks जिसमें एक 2 मिनट आधारभूत हालत के होते हैं लेकिन उनके पैर कार्योंशिशु एक आभासी दहलीज पार करने के लिए खड़ी अपने पैरों से चलता है अगर शिशु के पैर कार्यों शिशु मोबाइल को सक्रिय जिसमें एक 6 मिनट अधिग्रहण हालत द्वारा पीछा मोबाइल शिशु, सक्रिय नहीं कर सकते। इस प्रोटोकॉल 'शिशुओं सहज पैर कार्यों की मात्रा का ठहराव के साथ ही शिशुओं उनके पैर कार्यों और शिशु मोबाइल की सक्रियता के बीच संबंध का पता लगाने के रूप में आंदोलनों के विभिन्न पहलुओं की मात्रा का ठहराव के लिए अनुमति देता है। 2 दिन, 2 मिनट आधारभूत हालत और 6 मिनट अधिग्रहण हालत के अलावा, एक 2 मिनट विलुप्त होने हालत शिशु के पैर कार्यों शिशु मोबाइल सक्रिय नहीं करते हैं, जिसमें जोड़ा गया है। यह एक पहले से ही सीखा पर्यावरण प्रतिक्रिया बंद है जब शिशुओं उनके पैर कार्यों बदल कैसे की मात्रा का ठहराव के लिए अनुमति देता है।
पिछले शिशु मोबाइल मानदंड में, पैर आंदोलन 4-6, विशिष्ट कूल्हे और घुटने की आवृत्ति reinforc किया गया है 7,8, या एक पैनल 9 लात मार कोणमोबाइल आंदोलन के साथ एड। आधारभूत हालत 4-9 की तुलना में प्रत्येक दिन प्रदर्शन अधिग्रहण या विलुप्त होने की स्थिति के दौरान इन पैर कार्यों में वृद्धि के रूप में परिभाषित किया गया था। दिन भर सीखना दिन में 2 या 3 की आधारभूत या अधिग्रहण की स्थिति के दौरान इन पैर कार्यों में वृद्धि हुई है और दिन 1 5,6 के आधारभूत शर्त के रूप में परिभाषित किया गया था। ये पिछले मोबाइल लद हालांकि, वे काम सीखने जब विकल्पों शिशुओं उन्हें उपलब्ध है आंदोलन के बारे में जानकारी प्रदान नहीं करते हैं, शिशुओं मोबाइल सक्रियण के साथ प्रबलित रहे हैं कि पैर कार्यों की आवृत्ति में वृद्धि है कि प्रदर्शित करता है। लात मार दर मजबूत बनाया है अगर उदाहरण के लिए, शिशुओं के प्रदर्शन और सीखने का प्रदर्शन जब उनकी लात मार दर बढ़ जाती है या तो मोबाइल या जब मोबाइल नहीं रह सक्रिय हो जाता है के साथ बातचीत कर रहे हैं। यह शिशुओं उनकी लात मार दर परिष्कृत कर सकते हैं कि यह दर्शाता है, लेकिन शिशुओं generat करने के लिए अपने पैर समन्वय पैटर्न या टोक़ उत्पादन परिष्कृत कर सकते हैं अगर यह अज्ञात हैअपने पसंदीदा आंदोलन प्रदर्शनों की सूची के भीतर नहीं हैं कि ई पैर कार्रवाई।
इस मोबाइल प्रतिमान है कि शिशुओं में अद्वितीय है पिछले मोबाइल लद की तुलना में मोबाइल सक्रिय करने के लिए और अधिक परिष्कृत पैर कार्रवाई प्रदर्शित करने के लिए आवश्यक हैं। इस मोबाइल प्रतिमान में, तालिका के ऊपर एक पैर की ऊंचाई एक पैर से जुड़ी एक प्रकाश उत्सर्जक डायोड (एलईडी) से स्थिति डेटा का उपयोग कर 2 मिनट आधारभूत हालत के दौरान की जाती है। एक आभासी दहलीज तो आधारभूत हालत दौरान दोनों पैरों की ऊंचाई के ऊपरी सीमा के भीतर है कि ऊंचाई पर तालिका के समानांतर स्थापित किया जाएगा। या तो पैदल सीमा पार अगर अधिग्रहण के दौरान, मोबाइल घूमता है और संगीत निभाता है। 3 सेकंड के बाद, मोबाइल बंद हो जाता है और शिशु सीमा से नीचे पैर से चलता है सिर्फ अगर reactivates, और फिर खड़ी पैर चलता रहता है और फिर दहलीज पार करती है। समय की सबसे बड़ी राशि के लिए मोबाइल को सक्रिय करने के लिए, शिशुओं सीमा से ऊपर एक पैर कदम है और grav के खिलाफ बनाए रखने की जरूरतअल्पसंख्यक 3 सेकंड के लिए है, तो जल्दी से सीमा से नीचे पैर कदम है और फिर सीमा से ऊपर के लिए यह कदम और आदि 3 सेकंड के लिए वहाँ पकड़ो। यह बस लात मार दर में वृद्धि की तुलना में अधिक परिष्कृत पैर कार्रवाई की आवश्यकता है।
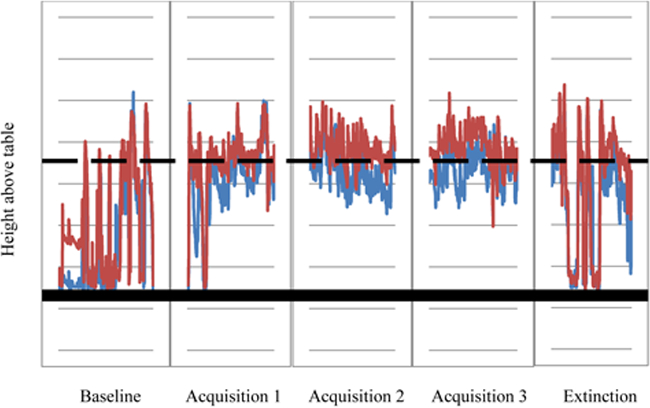
चित्रा 2: एक प्रतिनिधि शिशु से अंत प्रभावोत्पादक (फीट) की अनफिल्टर्ड स्थिति डेटा व्यक्तिगत सीखने मापदंड पर आधारित अधिगम प्रदर्शन किया जो एक 3 महीने पुराने शिशु के 2 दिन से अनफिल्टर्ड स्थिति डेटा।। लाल रेखा के दाहिने पैर पर रखा प्रकाश उत्सर्जक डायोड के Z-समन्वय (एलईडी) की स्थिति डेटा है। ब्लू लाइन बाएं पैर पर एलईडी से स्थिति डेटा है। मोटा काला लाइन तालिका है। बिंदीदार रेखा अपने आधारभूत दौरान लात मार की ऊंचाई के आधार पर प्रत्येक शिशु के लिए के रूप में व्यक्तिगत रूप से 14 सेमी तालिका के ऊपर रखा निर्धारित आभासी दहलीज है1 दिवस X- अक्ष की हालत में 2 मिनट के अंतराल से समय लेबल है। मोबाइल सक्रिय नहीं करता है और अधिग्रहण 1 के पहले 30 सेकंड के दौरान, तो वह लगातार मेज से दोनों पैर रखता है और मोबाइल जब तक अगले 5½ मिनट के लिए सही दहलीज के चारों ओर अपने पैर से चलता है जब शिशु आधारभूत दौरान उसका पैर कैसे चलता नोट अब कोई विलुप्त होने की स्थिति के दौरान सक्रिय हो जाता है।
इस मोबाइल प्रतिमान की दूसरी अनूठी विशेषता प्रत्येक शिशु के पैर कार्रवाई शिशुओं कार्य जानने के लिए उनके आंदोलन विकल्पों का उपयोग कैसे यों के लिए राज्य के अत्याधुनिक गति पकड़ने की तकनीक का उपयोग कर पता लगाया है कि है। एक प्रतिनिधि शिशु से मोबाइल को सक्रिय करता है कि प्रत्येक पैर पर एलईडी की अनफिल्टर्ड स्थिति डेटा चित्रा 2 में शामिल है। शिशु आधारभूत और अधिग्रहण के पहले भाग के दौरान तालिका के ऊपर विभिन्न ऊंचाइयों पर अपने पैरों से चलता है, लेकिन फिर दोनों पैरों से चलता है कि कैसे ध्यान दें सही अधिग्रहण कब्जा के बाकी के दौरान सीमा से चारों ओरमोबाइल तक tion के नहीं रह विलुप्त होने के दौरान सक्रिय हो जाता है। इस खोज-सीखने के कार्य को पूरा करने के लिए कई संभावित आंदोलन रणनीतियों में से एक है। रणनीतियों गति पकड़ने प्रणाली से अर्जित की स्थिति डेटा का उपयोग कर तीन आयामी कीनेमेटीक्स और कैनेटीक्स कंप्यूटिंग के द्वारा मात्रा निर्धारित किया जा सकता है। विशेष रूप से, सीखने की प्रक्रिया मोबाइल सक्रियण की अवधि, अंत प्रभावोत्पादक मोबाइल, हिप-घुटने समन्वय पैटर्न को सक्रिय है, जो (पैर) की स्थिति विचरण के बराबर है जो प्रबलित पैर कार्रवाई (% RLA), के प्रतिशत के मामले में मात्रा निर्धारित है , और कूल्हे और घुटने संयुक्त torques।
