Клинические патологии, влияющие на систему сенсорно, например, верхний мотонейрон (УМН) травмы следующего хода, приводят к функциональных нарушений, включая слабость, потеря постуральной стабильности и спастичности, которые могут негативно повлиять на передвижение. Восстановление может быть переменной со значительным числом выживших после инсульта не суметь достичь функциональных этапов безопасного стояния или ходьбы 1,2.
Дискретная практика ходьбе и сидеть к подставке общие задачи после реабилитационные УМН патологии 3,4, однако переходные движения часто пренебрегают. Сядьте к ходить (STW) является последовательным постуральной-двигательная задача включения сидячую к подставке (STS), походка инициацию (GI), и ходьба 5.
Разделение STS и GI, отражает колебания во время STW наблюдается у пациентов с болезнью 6 и хроническим инсультом Паркинсона 7, в дополнение к старой unimpaireг взрослые 8, но не у молодых здоровых людей 9. Поэтому сидеть к подставке-и-прогулка (STSW) обычно реализуется в клинических условиях и определяется фазы паузы переменной длины в положении стоя. Тем не менее, нет никаких опубликованных протоколов на сегодняшний день, определяющие динамику STSW в контексте подходящей для групп пациентов.
Обычно в исследованиях STW начальная высота стула составляет 100% от высоты колена (KH, от пола до колена расстояния), ноги на ширине и GI свинцово-конечности являются самостоятельный выбор, руки ограничены поперек груди и экологически значимого контекста задачи часто отсутствует 5-9. Тем не менее, пациенты считают , увеличившись с 100% KH 10 сложных и часто принимают более широкое положение ступней по сравнению со здоровыми лицами 11, начать походку с их пораженной ноги 7, и использовать свои руки , чтобы генерировать импульс 7.
Для того, чтобы инициировать походка, изменение состояния в движении всего тела в назн eful направление требуется 12. Это достигается за счет расцепления всего тела в системе центра масс (BCom: взвешенное среднее всех рассматриваемых сегментов тела в пространстве 13) от положения центра давления (КС: позиция силы реакции результирующая земли (ГФП) вектор 14). В опережающей фазе GI, быстрое стереотипного заднего и бокового движения КС к краю качаться происходит таким образом , генерируя BCom импульс 12,15. КС и BCOM, таким образом , разделены, причем горизонтальное расстояние между ними будучи предложен в качестве меры динамического постурального контроля 16.
Расчет КС-BCom расстояния требует одновременное измерение КС и BCom позиций. Стандартный расчет КС приведен ниже в уравнении (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Где M и Force представляют моменты относительно осей силы платформы и направленной GRF соответственно. Индексы представляют собой оси. Начало координат представляет собой вертикальное расстояние между контактной поверхностью и происхождение силовой платформы, и считается равным нулю.
Кинематический метод получения позиции BCom включает в себя отслеживание смещения сегментных маркеров. Точное представление движения тела сегмента может быть достигнуто за счет использования маркеров кластерные на жестких пластин , расположенных вдали от костистых ориентиров, сводя к минимуму мягких тканей-артефакт (техника CAST 18). Для того чтобы определить положение BCom, индивидуальные массы сегмента тела оцениваются на основе трупной работы 19. Трехмерная (3D) система движения собственное программное обеспечение использует положения проксимального и D координатistal места сегмента: 1) определяют сегментные длины, 2) арифметически оценки сегментные массы, и 3) вычислить сегментные местоположения COM. Затем эти модели способны обеспечить оценки 3D позиции BCom в данный момент времени на основе чистой суммирования между сегментных позиций (рисунок 1).
Таким образом, целью данной работы является первым представить стандартизированный протокол STSW, который является экологически действительным и включает в себя вставая с высокой сиденья высотой. Было показано , что ранее STSW от 120% КН биомеханики нечеткие от 100% KH запрета генерации низких BCom вертикальных скоростей и ГФП во время растет 20, что означает , поднимающийся от 120% КН легче (и безопаснее) для скомпрометированных лиц. Во-вторых, вывести КС-BCOM горизонтальные расстояния для оценки динамического постурального контроля во время ключевых этапов и переходов с использованием 3D-захвата движения. Этот подход, который у здоровых людей во время STSW не зависит от конечности-леОбъявление 20, предлагает перспективу функциональной оценки восстановления. Наконец, предварительный STSW данные набор представитель молодых здоровых людей представлена, и внутри- и предметные изменчивость в группе определяется с целью информирования сравнения с патологическими лиц.
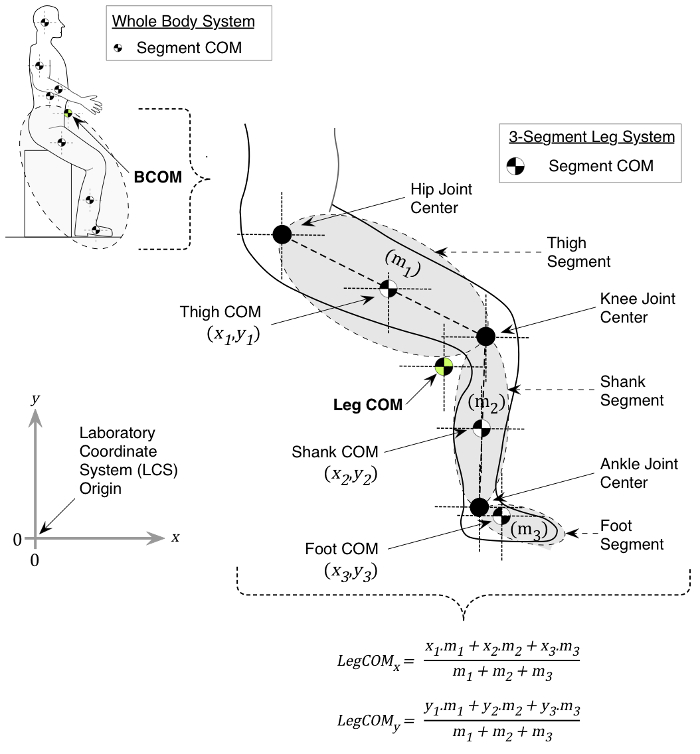
Рисунок 1. Расчет 2D BCOM. Для простоты, пример основан на вычислении цельной ноги COM из 3-связанной массы в 2 -х измерениях, где координаты соответствующего COM – позиции (х, у) и сегментных массы (т 1, м 2, м 3), известны. Сегмент массы и расположение сегментных COM позиции по отношению к лабораторной системе координат (ЛСК; происхождение: 0, 0), оцениваются системой анализа движения с использованием патентованного программного обеспечения при условии массы тела и опубликованных антропометрических данных (см основной текст). ХАй у ног COM положение, в этом примере 3-связанной массы, затем получают с помощью формул , показанных. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
