De lage temperatuur non-contact atomic force / scanning tunneling microscoop (LT NC-AFM / STM, in de volgende gewoon genoemd SPM) is het middel bij uitstek voor het atomair precieze manipulatie van individuele atomen of moleculen 1-3. SPM-gebaseerde manipulatie is typisch beperkt tot twee dimensies en bestaat uit een reeks abrupte en dikwijls stochastische manipulatie gebeurtenissen (sprongen). Dit beperkt hoofdzaak controle over het proces. Met de molecuul van één chemische binding op een goed gedefinieerde atomaire positie leidt tot een aanpak die deze beperkingen kan overwinnen 4 – 9. Gedurende de manipulatie het contact molecuul is verbonden met de tip SPM zodat bewegen van de molecule in drie dimensies door geschikte verplaatsing van de punt mogelijk wordt. Hierdoor ontstaat de mogelijkheid om diverse complexe manipulatie procedures uitgevoerd in 3D-ruimte. Maar het in contact brengen manipulatie kan hi zijnndered door interacties van de gemanipuleerde molecuul met het oppervlak en / of andere moleculen in de omgeving, welke krachten die groot genoeg is om de punt-molecuul contact openscheuren kan leiden. Daarom de bijzondere 3D baan van de SPM tip al dan niet tot een succesvolle manipulatie evenement. Er ontstaat een vraag dus hoe protocollen die leiden tot een succesvolle afronding van manipulatie in de omstandigheden waarbij de tip-molecuul obligatie heeft een beperkte sterkte te definiëren, terwijl de interacties van de gemanipuleerde molecuul met zijn omgeving zijn niet a-priori goed gekarakteriseerd.
Hier deze vraag wordt benaderd in de meest intuïtieve manier denkbaar. De onderzoeker is toegestaan om de verplaatsingen van de SPM tip besturen door simpelweg het verplaatsen van hun hand 7. Dit wordt bereikt door het koppelen van de SPM een commercieel motion capture systeem, sommige waarvan de specificaties worden hieronder gegeven. Het voordeel van "de hand gecontroleerde manipulatie" (HCM) is in thij het vermogen experimentator snel uit te proberen verschillende manipulatie trajecten en leren van hun falen of succes.
De HCM setup is gebruikt om een proof-of-principle experiment waarbij een woord ( "JÜLICH") werd stenciled in een gesloten laag van peryleen-3,4,9,10-tetracarbonzuurdianhydride (PTCDA) moleculen op Ag (uit te voeren 111), het verwijderen van 48 moleculen, een voor een, met HCM 7. Optillen van een molecuul van het oppervlak splitst de intermoleculaire waterstofverbindingen die de moleculen in de monolaag 10 binden. Gewoonlijk is de totale sterkte van de onderhavige intermoleculaire bindingen dan de sterkte van de enkelvoudige chemische binding tussen de buitenste atoom van de naald en een carbonzuur zuurstofatoom van PTCDA waarmee het molecuul in contact wordt (zie figuur 1). Dat kan leiden tot het verbreken van de punt-molecuul contact en na het uitvallen van de manipulatie poging. De taak van de experimentator is dus BEPALIne een tip traject dat de weerstand intermoleculaire bindingen verbreekt achtereenvolgens plaats van simultaan, zodat de totale kracht op de tip-molecuul contact komt nooit zijn kracht.
Hoewel het gewenste traject kan in principe worden gesimuleerd, door de omvang en complexiteit van het systeem betrokken noodzakelijke simulaties zou prohibitief grote hoeveelheid tijd. In tegenstelling daarmee gebruikt HCM was het mogelijk de eerste molecule na 40 minuten verwijderd. Tegen het einde van het experiment werd de extractie reeds veel minder tijd die de doeltreffendheid van het leerproces bevestigd. Bovendien, de nauwkeurigheid en de veelzijdigheid van de HCM werkwijze werd aangetoond in de handeling van reverse manipulatie als een molecuul uit het aangrenzende ligging werd gebruikt om de leegte na de foutieve verwijdering van een ander molecuul van de monolaag te sluiten.
Motion capture benadering, terwijl ze snel en intuïtief, isbeperkt tot het genereren van tip-baangegevens. Voor verdere systematische ontwikkeling van nieuwe moleculaire manipulatie protocollen is het even belangrijk om in staat om de punt baangegevens in realtime te bekijken en om eerder gegenereerde gegevens te analyseren. Daarom wordt de functionaliteit van de HCM installatie aanzienlijk verbeterd door toevoeging virtual reality bril waardoor de experimentator om de gegevens uitgezet in de 3D virtuele scène waarin de tip van de bal wordt versterkt door de stroom (I) en frequentieverschuiving zie (Af) meetwaarden de SPM realtime 8 (zie hieronder). Trouwens, de virtuele realiteitsscène toont een model van de gemanipuleerde molecuul dat dient als een visuele schaal referentie. Dus de HCM setup aangevuld door de virtual reality interface is geschikt voor systematisch in kaart brengen van de manipulatie traject ruimte en de opeenvolgende verfijning van de veelbelovende manipulatie protocollen. Daarnaast is het systeem ook faciliteert de kennisoverdracht tussen different experimenten. Hieronder wordt een beschrijving van de installatie en sommige van zijn specificaties die voor manipulatie experimenten.
De experimenten worden uitgevoerd in ultrahoog vacuüm (UHV) bij een basisdruk van 1 x 10 -10 mbar met een commerciële SPM bestaat uit een bereidingskamer en een analysekamer. De voorbereiding kamer is uitgerust met: Ar + bron wordt gebruikt voor het monster sputteren, sample overdracht via manipulator (laat verwarmen en koelen van een monster), lage-energie elektronen diffractie (LEED), een op maat gemaakte Knudsencel (K-cel) die PTCDA poeder gezuiverd door sublimatie. De analysekamer is voorzien van: LN 2 bad cryostaat met een volume van 12 l en een vasthoudtijd van 46 uur, LHe bad cryostaat (5 L, 72 uur), Besocke 11 beetle type SPM voorzien van een stemvork sensor 12 ( TFS), bestaande uit een kwarts stemvork met een elektrisch verbonden PTIR tip (voor STM werking)Dat wordt gesneden en geslepen door een gefocusseerde ionenbundel (FIB) (figuur 2).
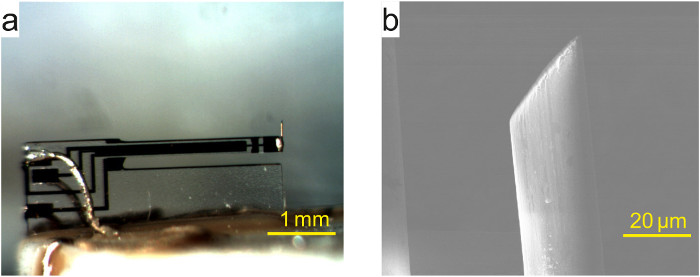
Figuur 2. Stemvork sensor. (A) Afbeelding van een commercieel stemvork sensor met aangehechte PTIR tip. (B) SEM beeld van de PTIR tip top gesneden met FIB. Klik hier om een grotere versie van deze figuur te bekijken.
De AFM wordt gebruikt in de frequentie gemoduleerde (FM) modus 13 waar de TFS is enthousiast over de resonantie (f 0 ≈ 31.080 Hz) met een piëzo-dithering. De piëzo-elektrische signaal van de oscillerende stemvork wordt versterkt en door een fasevergrendelde lus (PLL), waarin de amplitude van de oscillatie van TFS constant houdt en signaleert afwijkingen van its resonantiefrequentie, Af = f – f 0, dat afkomstig is van het verloop van de kracht die op het puntje. Zoals getoond in figuur 3 de SPM tip positie wordt geregeld door spanning (U X, u y, u z) toegepast op een set van x-, y-, z-piëzo's (piëzo constanten bij 5 K: x = 15, y = 16, z = 6 A / V). De u x, u y, z u -voltages (± 10 V bij 20 bit resolutie) worden gegenereerd bij de SPM elektronica uitgangen. Ze worden verder versterkt door een hoog voltage (HV) versterker met een maximale uitgangsspanning van ± 200 V. heeft
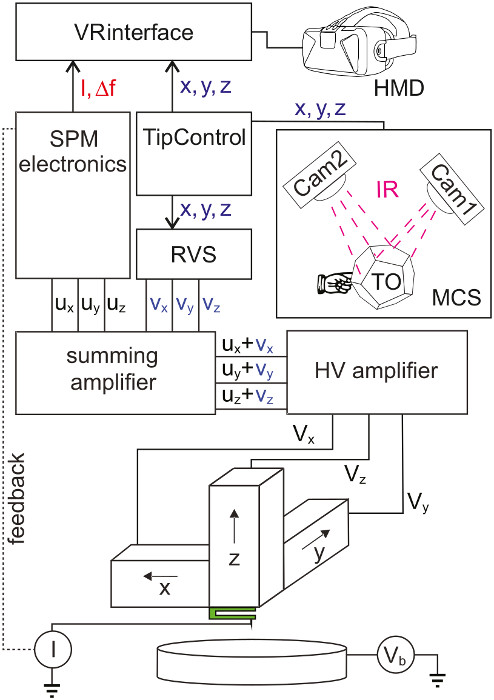
Figuur 3. Schema van de HCM setup. De positie van de (bijgehouden object) aan die meerdere (infrarood) IR bronnen op het oppervlak geïnstalleerd wordt gevolgd door twee infraroodcamera's van de motion capture systeem (MCS). TipControl zoftware verkrijgt de coördinaten (x, y, z) van MCS en geeft deze door aan de externe spanningsbron (RVS) die een set spanningen (vx, Vy, Vz) die worden opgeteld bij de spanning (U X genereert , u y, u z) die door de SPM elektronica voor de besturing van SPM tip positie. De toegevoegde spanning gaat door een hoog voltage (HV) versterker en wordt verder toegevoerd aan de piëzo-positioneringssysteem van de SPM tip. De opstelling laat handmatige bediening van de tip positionering als de SPM feedback (FB) lus is geopend. De positie (x, y, z) van de tip en I (x, y, z) en Af (x, y, z) worden doorgegeven aan de VRinterface software die in de virtuele 3D scene gezien door de operator uitzet het dragen van de head-mounted display (HMD). klik hier om een grotere versie van deze figuur te bekijken.
De tunneling stroom die tussen de SPM tip enhet oppervlak wordt gemeten met een transimpedantie versterker met variabele versterking die varieert van 1 x 03-01 oktober x 10 9 V / A (bandbreedte gain 1 x 10 9 V / A 1 kHz). De uitgang van de versterker wordt toegevoerd aan de STM feedback (FB) lus aan het uiteinde hoogte boven het oppervlak constante stroom scanmodus regelen. De stabiliteit van de verbinding (met de TFS oscillatie uitgezet) is 1-3 uur. De piëzoelektrische oscillatiesignaal van het TFS wordt geamplificeerd in twee fasen: (1) voorversterker de LN 2 schild vastgesteld (versterking 1 x 10 8 V / A, bandbreedte 20 kHz), en (2) externe spanning versterker met variabele versterking van 1 x 10 1 5 x 10 4 en een bandbreedte van 1 MHz.
Voor HCM experimenten, wordt de SPM setup uitgebreid met: motion capture systeem (MCS), op afstand bedienbare multichannel spanningsbron (RVS), het optellen van de versterker en virtual reality head mounted display (HMD). Alle genoemde apparaten behalve de summing versterker werden commercieel verkregen.
MSC is een infrarood (IR) marker-volgsysteem dat millimeter resolutie van ruimtelijke verplaatsingen mogelijk maakt met een snelheid van 100 Hz. Het systeem bestaat uit twee infraroodcamera's, een traceerbare object (TO) en de besturingssoftware. De MCS software verkrijgt de x-, y-, z-coördinaten van de in 3D-ruimte door analyse van de verkregen beelden van de twee camera's. MCS levert een programmeerbibliotheek dat het gebruik van de coördinaten van de in een afzonderlijk programma toelaat.
De coördinaten van de TO (x OM, y TOT z TO) worden doorgegeven aan een op maat ontwikkelde software programma "TipControl". Figuur 4 toont een screenshot van de grafische gebruikersinterface. De software wordt geactiveerd door de "start" knop in het venster. Na activering (τ = 0) van de software worden alle v x -, v y -, v z -voltages op RVS (spanningsbereik ± 10 V op 16bit resolutie, 50 msec vertraging per stap spanning) volgens de volgende uitdrukking  etc., waarbij c x, y c, c z zijn de factoren die 5 cm van de verplaatsing van omzetten in 1 een verplaatsing van de SPM tip. De factoren p x (t), p y (t), p z (t) zijn waarden bepaald door de status van de x-, y-, z-selectievakjes in het softwarevenster. Als het vakje is geselecteerd, de overeenkomstige p (t) op 1. Alle p (t) worden ingesteld op 0 op het moment dat het "Pauze" in het softwarevenster drukt. Waarmee de machinist tijdelijk "bevriezen" de positie van de tip. Door op de "reset all" knop in de software-venster sets v x -, v y -, v z -voltages op nul waarbij de punt naar zijn oorspronkelijke positie bepaald door de SPM software terugkeert. Het tekstveld "manual opdracht om RVS" in de software-venster ca n worden gebruikt om elk van de v x set -, v y -, vz -voltages op elke waarde binnen het toegestane bereik van ± 10 V. De vx -, v y -, -voltages vz gegenereerd door RVS toegevoegd aan de u x -, u y -, u z -Output spanning signalen van SPM elektronica via de opsomming versterker (te krijgen 1, bandbreedte 50 kHz, vermogensbereik ± 10 V).
etc., waarbij c x, y c, c z zijn de factoren die 5 cm van de verplaatsing van omzetten in 1 een verplaatsing van de SPM tip. De factoren p x (t), p y (t), p z (t) zijn waarden bepaald door de status van de x-, y-, z-selectievakjes in het softwarevenster. Als het vakje is geselecteerd, de overeenkomstige p (t) op 1. Alle p (t) worden ingesteld op 0 op het moment dat het "Pauze" in het softwarevenster drukt. Waarmee de machinist tijdelijk "bevriezen" de positie van de tip. Door op de "reset all" knop in de software-venster sets v x -, v y -, v z -voltages op nul waarbij de punt naar zijn oorspronkelijke positie bepaald door de SPM software terugkeert. Het tekstveld "manual opdracht om RVS" in de software-venster ca n worden gebruikt om elk van de v x set -, v y -, vz -voltages op elke waarde binnen het toegestane bereik van ± 10 V. De vx -, v y -, -voltages vz gegenereerd door RVS toegevoegd aan de u x -, u y -, u z -Output spanning signalen van SPM elektronica via de opsomming versterker (te krijgen 1, bandbreedte 50 kHz, vermogensbereik ± 10 V).
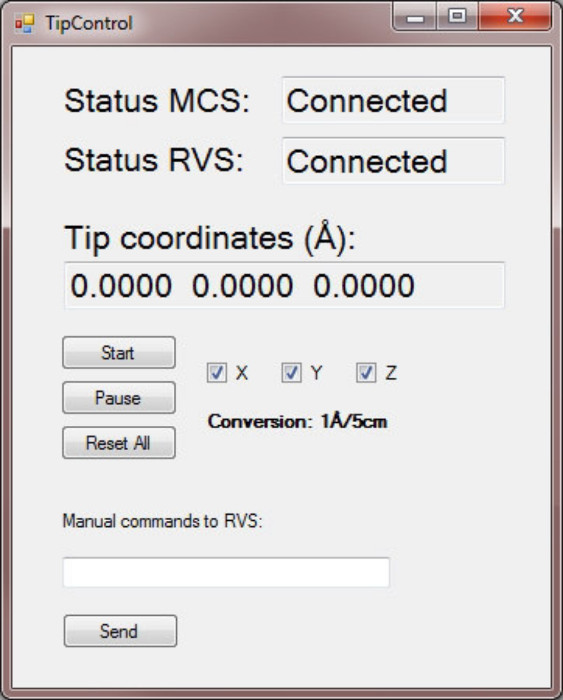
Figuur 4. Screenshot van het venster interface. Twee indicatoren vertonen de status van de verbinding met de MCS en RVS-systemen. Selectievakjes worden gebruikt om de hand-controle langs geselecteerde ruimtelijke assen te activeren. De knop "Start" initieert gegevensstroom tussen MCS, TipControl en RVS volgens de figuur schema 3. Button "Pauze" stopt de datastroom. Button "Reset All" worden alle RVS spanningen tot nul.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Klik hier om een grotere versie van deze figuur te bekijken.
Voor visualisatie van de experimentele gegevens (tip bal, I, Af) een head mounted display (HMD) gebruikt. De HMD biedt een stereoscopische weergave (split HD-scherm – de ene helft voor elk oog, 1920 x 1080 pixels bij 75 Hz). Een speciale IR camera volgt de positie en oriëntatie van HMD in de 3D-ruimte met behulp van IR-LED's op het oppervlak van HMD vast. De HMD tracking systeem kan de bestuurder het zicht in de 3D virtual reality scene te veranderen door een draai van hun hoofd of gewoon verplaatsen van hun lichaam.
De op maat geschreven software "VRinterface" verzamelt de gegevens zowel van SPM en MCS, maakt het in de 3D-scène met behulp van OpenGL en geeft deze weer in de HMD met de hulp van de HMD software development kit (SDK). VRinterface haalt de eigenlijke x-, y-, z-coördinaten van het punt direct van detip software (enkele milliseconden latency), terwijl ik en Af signalen rechtstreeks van de uitgangen van de SPM elektronica (latency ≈ 250 msec) worden gelezen. Figuur 5 toont een screenshot van de 3D virtuele scene zoals gezien door de exploitant draagt HMD tijdens HCM. Binnen in de virtuele 3D scene de tip top wordt weergegeven als een witte bol. De kleuring van het opgenomen uiteinde trajecten weerspiegelt waarden ofwel log (I (x, y, z)) of Af (x, y, z). Schakelen tussen log (I (x, y, z)) of Af (x, y, z) kleurenmodi wordt gedaan door de druk op de knop. Een andere knop initieert de opname (en de weergave) van de experimentele tip traject data. Druk nogmaals op de knop stopt de opname. De virtuele scène toont een statische PTCDA molecuul dat wordt gebruikt als een visueel hulpmiddel tijdens manipulatie. De operator uitgelijnd zijn oriëntatie handmatig de oriëntatie van de werkelijke molecule op het oppervlak monteren met toetsen op een toetsenbord.
Let op: Omdat het hoofd trekken van HMD is gebaseerd op IR-LED's, het kan interfereren met de MCS, omdat het maakt ook gebruik van infrarood licht om de positie van de op te sporen. Daarom moet een unieke vorm die door de MCS hebben. Dit helpt MCS om onderscheid te maken tussen de signalen die afkomstig zijn van TO en degenen die afkomstig zijn van IR-leds van HMD.
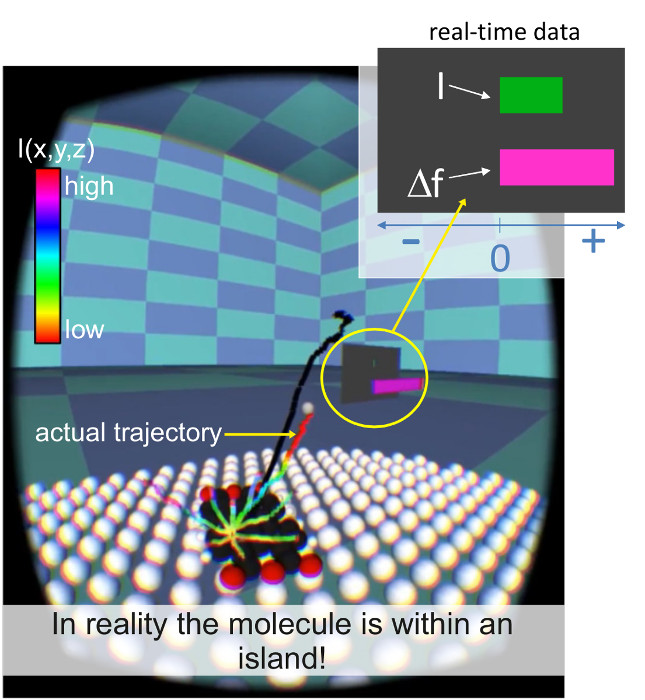
Figuur 5. S creenshot van de 3D virtuele scene weergegeven aan de operator in HMD tijdens HCM. Een set van witte bollen vormt een model Ag (111) oppervlak. Oriëntatie van het model oppervlak kan niet noodzakelijk samen met de oriëntatie van het monster. Een model van de PTCDA molecuul wordt boven het model oppervlak geplaatst. C, O, H atomen van PTCDA worden getoond in zwart, rood en wit, respectievelijk. Ten behoeve van het gemak azimutale oriëntatie van het model molecule kan worden aangepast om de oriëntatie van het gekozen molecuul real pastvoor manipulatie. De tip positie wordt gemarkeerd door een enkele witte bol die het uiterste puntje apex atoom. De real-time I (x, y, z) en Af (x, y, z) gegevens worden weergegeven als bar indicatoren die naast de tip. Eerder opgenomen alsmede de huidige uitgevoerde manipulaties worden weergegeven als 3D trajecten waarvan de kleur vertegenwoordigt ofwel log (I (x, y, z)) of Af (x, y, z) gemeten op overeenkomstige posities van het traject. De figuur toont trajecten die zijn gekleurd met log (I (x, y, z)) -signaal. De kleur contrast kan worden geschakeld tussen de log (I (x, y, z)) en Af (x, y, z) modes door druk op de knop. Klik hier om een grotere versie van deze figuur te bekijken.
