Le sans contact force / balayage atomique microscope à effet tunnel à basse température (LT NC-AFM / STM, dans ce qui suit simplement appelé SPM) est l'outil de choix pour la manipulation atomiquement précise des atomes ou des molécules 1 individuelles – 3. la manipulation basée SPM est généralement limitée à deux dimensions et se compose d'une série d'événements de manipulation brusque et souvent aléatoires (sauts). Cela limite essentiellement le contrôle sur le processus. Contacter la molécule en question par une liaison chimique simple à une position atomique bien définie conduit à une approche qui peut surmonter ces limitations 4 – 9. Tout au long de sa manipulation de la molécule en contact est connecté à la pointe de SPM de telle sorte que le déplacement de la molécule dans les trois dimensions par des déplacements appropriés de la pointe devient possible. Cela crée la possibilité pour diverses procédures de manipulation complexes effectuées dans l'espace 3D. Cependant, la manipulation en contact peut être salutndered par des interactions de la molécule manipulée avec la surface et / ou d'autres molécules dans son environnement, ce qui peut créer des forces qui sont assez grands pour rompre le contact pointe-molécule. Par conséquent, une trajectoire 3D particulière de la pointe de SPM peut ou ne peut pas donner lieu à un événement de manipulation réussie. Une question se pose donc de savoir comment définir des protocoles qui mènent à la réussite de la manipulation dans les circonstances lorsque la liaison pointe-molécule a une force limitée, tandis que les interactions de la molécule manipulée avec son environnement ne sont pas a priori bien caractérisés.
Voici cette question est abordée de manière imaginable la plus intuitive. L'expérimentateur est autorisé à contrôler les déplacements de la pointe de SPM en déplaçant simplement la main 7. Ceci est réalisé en couplant le GPS à un système de capture de mouvement commerciale, certaines des caractéristiques qui sont fournies ci-dessous. L'avantage de "manipulation contrôlée de la main" (HCM) est en til la capacité de expérimentateur d'essayer différentes trajectoires de manipulation rapidement et apprendre de leur échec ou de réussite.
La configuration HCM a été utilisée pour mener une expérience de validation de principe dans lequel un mot ( «JÜLICH») a été stenciled dans une couche fermée de pérylène-3,4,9,10-tétracarboxylique dianhydride (PTCDA) molécules sur Ag ( 111), supprimant les 48 molécules, une par une, avec 7 MCH. Levage d' une molécule à partir de la surface clive les liaisons hydrogène intermoléculaires qui lient les molécules dans la monocouche 10. Typiquement , la force totale des liaisons intermoléculaires présentes dépasse la force de la liaison chimique simple entre l'atome le plus externe de la pointe et un atome d'oxygène carboxylique de PTCDA par lequel la molécule est en contact (voir Figure 1). Cela peut conduire à la rupture du contact pointe-molécule et l'échec suivant de la tentative de manipulation. La tâche de l'expérimentateur est donc de détermidéfinir une trajectoire de pointe qui brise les liaisons intermoléculaires résistent séquentiellement plutôt que simultanément, de sorte que la force totale appliquée à la pointe de contact molécule ne dépasse jamais sa force.
Bien que la trajectoire désirée peut en principe être simulé, en raison de la taille et de la complexité du système impliqué les simulations nécessaires prendraient une prohibitif grande quantité de temps. Par contraste avec cela, en utilisant MCH il était possible d'enlever la première molécule au bout de 40 minutes. Vers la fin de l'expérience, l'extraction a déjà beaucoup moins de temps ce qui confirme l'efficacité de la procédure d'apprentissage. En outre, la précision et la polyvalence de la méthode HCM a été mis en évidence dans l'acte de manipulation inverse quand une molécule extraite de l'emplacement voisin a été utilisé pour fermer le vide laissé après la suppression erronée d'une autre molécule de la monocouche.
Mouvement approche de capture, tout en étant rapide et intuitive, estlimitée à la génération de données pointe trajectoire. Pour le développement systématique de nouveaux protocoles de manipulation moléculaire, il est tout aussi important d'être en mesure d'afficher les données pointe de trajectoire en temps réel, ainsi que pour analyser les données précédemment générées. Par conséquent, la fonctionnalité de la configuration HCM est améliorée sensiblement en ajoutant des lunettes de réalité virtuelle qui permettent à l'expérimentateur de voir les données tracées dans la scène virtuelle 3D où la pointe trajectoire est augmentée par le courant (I) et un décalage de fréquence (Af) des valeurs mesurées par le SPM en temps réel 8 (voir ci – dessous). En plus de cela, la scène de réalité virtuelle montre un modèle de la molécule manipulée qui sert de référence d'échelle visuelle. Ainsi, la configuration HCM complimenté par l'interface de réalité virtuelle est adaptée pour la cartographie systématique de l'espace manipulation de trajectoire et de raffinement successifs des protocoles de manipulation prometteurs. Outre que le système facilite également le transfert de connaissances entre les dexpériences ifférents. Les paragraphes qui suivent donnent une description de la configuration et de certaines de ses spécifications qui sont pertinentes pour les expériences de manipulation.
Les expériences sont réalisées en ultravide (UHV) , à une pression de base de 1 x 10 -10 mbar avec un SPM commercial constitué d'une chambre de préparation et une chambre d'analyse. La chambre de préparation est équipée de: Ar + source utilisée pour l' échantillon de pulvérisation, le transfert de l' échantillon par l' intermédiaire manipulateur (permet le chauffage et le refroidissement d'un échantillon), la diffraction de faible énergie électronique (LEED), une cellule de Knudsen personnalisée (K-cellule) contenant de la poudre PTCDA purifié par sublimation. La chambre d'analyse est équipé de: LN 2 salles de bain cryostat avec un volume de 12 L et un temps de maintien de 46 h, LHe bain cryostat (5 L, 72 h), Besocke 11 type coléoptère SPM équipé d'un capteur de diapason 12 ( TFS) constitué d'un diapason de quartz avec une pointe PTIR connecté électriquement (pour le fonctionnement de la STM)Qui est découpée et aiguisée par un faisceau d'ions focalisé (FIB) (figure 2).
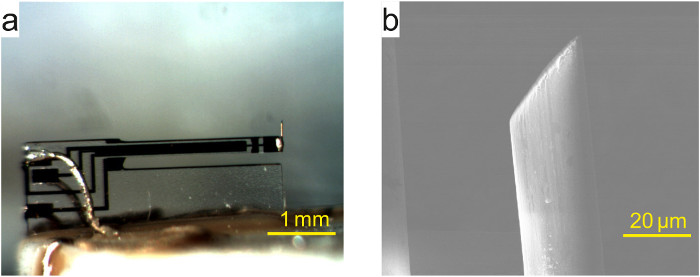
Figure 2. Tuning capteur fourchette. (A) l' image d'un capteur de diapason commercial avec pointe PTIR joint. (B) image MEB de la pointe apex PTIR coupé avec FIB. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
L'AFM est utilisé en mode (FM) 13 modulé en fréquence où le TFS est excité à la résonance (f 0 ≈ 31080 Hz) avec un piezo de tramage. Le signal piézo-électrique du diapason oscillant est amplifié et utilisé par une boucle à verrouillage de phase (PLL), qui maintient l'amplitude d'oscillation de la constante du TFS et le suivi des changements de its fréquence de résonance, Af = f – f 0, qui provient du gradient de la force agissant sur la pointe. Comme le montre la figure 3 , la position de la pointe de SPM est contrôlé par des tensions (u x, u y, u z) appliqué à un ensemble de x, y, z-piezos (constantes piézoélectriques à 5 K: x = 15, y = 16, z = 6 Å / V). Le u x, u y, z u -voltages (± 10 V à 20 bits de résolution) sont générés au niveau des sorties de l' électronique SPM. Ils sont en outre amplifiés par un amplificateur haute tension (HT), qui a une tension maximale de sortie de ± 200 V.
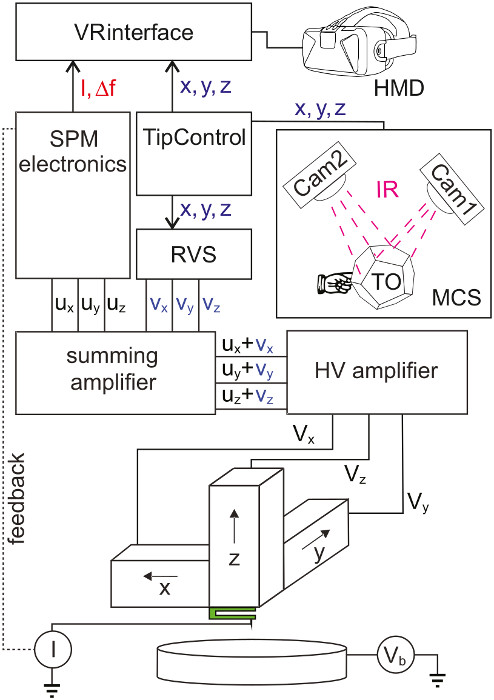
Figure 3. Schéma de la configuration HCM. La position de (objet suivi) A qui a de multiples sources (infrarouge) IR installés sur sa surface est suivie par deux caméras infrarouges du système de capture de mouvement (MCS). TipControl doncobtient ftware TO coordonnées (x, y, z) de MCS et il passe à la source de tension à distance (RVS) qui génère un ensemble de tensions (v x, v y, v z) qui sont additionnées avec les tensions (u x , u y, u z) produit par l'électronique de SPM pour le contrôle de la position de pointe de SPM. La tension supplémentaire passe à travers un amplificateur de haute tension (HV) et est en outre appliquée au système de la pointe de SPM piézo-positionnement. La configuration permet le contrôle manuel du positionnement de la pointe lorsque la boucle retour de SPM (FB) est ouvert. La position (x, y, z) de la pointe, ainsi que I (x, y, z) et Af (x, y, z) sont transmis au logiciel VRinterface qu'il trace dans la scène virtuelle 3D vu par l'opérateur portant le visiocasque (HMD). S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
Le courant tunnel qui circule entre la pointe de SPM etla surface est mesurée par un amplificateur de transimpédance avec un gain variable qui varie de 1 x 10 3 à 1 x 10 9 V / A (largeur de bande de gain à 1 x 10 9 V / A est égal à 1 kHz). La sortie de l'amplificateur est introduit dans la boucle rétroaction de la STM (FB) pour régler la hauteur de la pointe au-dessus de la surface en mode de balayage de courant constant. La stabilité de la jonction (avec l'oscillation TFS éteint) est 1-3 pm. Le signal d'oscillation piézoélectrique du TFS est amplifié en deux étapes: (1) pré – amplificateur fixé à la LN 2 bouclier (gain de 1 x 10 8 V / A, la bande passante de 20 kHz), et (2) un amplificateur de tension externe à gain variable à partir d' une x 10 1 à 5 x 10 4 et une bande passante de 1 MHz.
Pour les expériences HCM, la configuration du SPM est étendu avec: système de mouvement de capture (MCS), source de tension multicanal contrôlable à distance (RVS), un amplificateur de sommation et la tête de la réalité virtuelle monté affichage (HMD). Tous les dispositifs énumérés à l'exception du summing amplificateur ont été acquis dans le commerce.
MSC est un (IR), le système de suivi de marqueur infrarouge qui permet la résolution des déplacements spatiaux de millimètre à une vitesse de 100 Hz. Le système se compose de deux caméras IR, un objet traçable (TO) et le logiciel de contrôle. Le logiciel MCS obtient les axes X, Y, z les coordonnées de la TO dans l'espace 3D en analysant ses images obtenues par les deux caméras. MCS contient une bibliothèque de programmation qui permet d'utiliser les coordonnées de A dans un programme informatique distinct.
Les coordonnées de A (x A, y A, z A) sont transmis à un logiciel développé sur mesure "TipControl". La figure 4 montre une capture d' écran de l'interface utilisateur graphique. Le logiciel est activé par le bouton "start" dans la fenêtre. Après activation (τ = 0) , le logiciel définit tous les v x -, v y -, v z -voltages sur RVS (plage de tension ± 10 V à 16bits de résolution, temps d'attente de 50 ms par pas de tension) en fonction de l'expression suivante  etc., où c x, c y, z c sont les facteurs qui convertissent 5 cm du déplacement de TO dans 1 Å déplacement de la pointe de SPM. Les facteurs p x (t), P y (t), p z (t) ont des valeurs définies par l'état de la direction x, y, z les cases de la fenêtre de logiciel. Si la case est cochée, le p correspondant (t) est mis à 1. Tous les p (t) sont mis à 0 au moment où le bouton "pause" est pressée dans la fenêtre du logiciel. Cela permet à l'opérateur de temporairement "geler" la position de la pointe. En appuyant sur le bouton "reset all" dans la fenêtre du logiciel définit v x -, v y -, v z -voltages à zéro qui retourne la pointe à sa position initiale définie par le logiciel SPM. Le champ de texte "commande manuelle pour RVS" dans la fenêtre du logiciel ca n être utilisé pour définir l' un des v x -, v y -, v z -voltages à une valeur quelconque dans la plage autorisée de ± 10 V. Le v x -, v y -, v z -voltages générée par RVS sont ajoutés à l'u x -, u y -, u z signaux de tension -output de l' électronique SPM via un amplificateur de sommation (gain 1, la bande passante de 50 kHz, la plage de sortie ± 10 V).
etc., où c x, c y, z c sont les facteurs qui convertissent 5 cm du déplacement de TO dans 1 Å déplacement de la pointe de SPM. Les facteurs p x (t), P y (t), p z (t) ont des valeurs définies par l'état de la direction x, y, z les cases de la fenêtre de logiciel. Si la case est cochée, le p correspondant (t) est mis à 1. Tous les p (t) sont mis à 0 au moment où le bouton "pause" est pressée dans la fenêtre du logiciel. Cela permet à l'opérateur de temporairement "geler" la position de la pointe. En appuyant sur le bouton "reset all" dans la fenêtre du logiciel définit v x -, v y -, v z -voltages à zéro qui retourne la pointe à sa position initiale définie par le logiciel SPM. Le champ de texte "commande manuelle pour RVS" dans la fenêtre du logiciel ca n être utilisé pour définir l' un des v x -, v y -, v z -voltages à une valeur quelconque dans la plage autorisée de ± 10 V. Le v x -, v y -, v z -voltages générée par RVS sont ajoutés à l'u x -, u y -, u z signaux de tension -output de l' électronique SPM via un amplificateur de sommation (gain 1, la bande passante de 50 kHz, la plage de sortie ± 10 V).
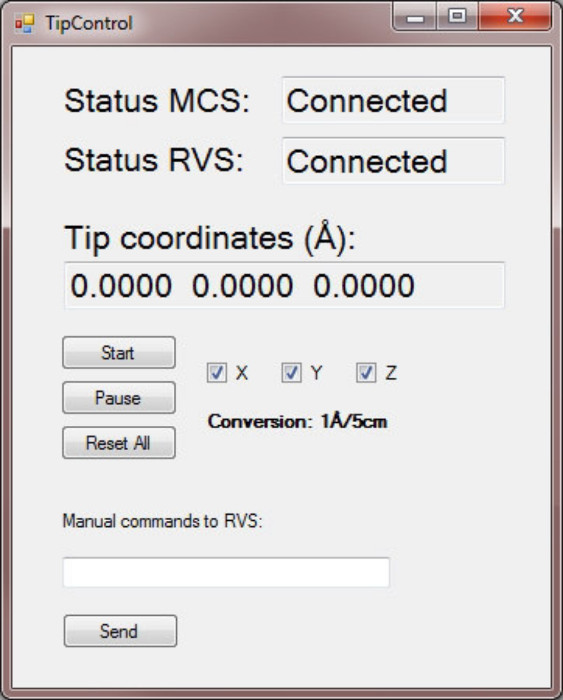
Figure 4. Capture d' écran de la fenêtre d'interface. Deux indicateurs montrent l'état de la connexion avec les systèmes MCS et RVS. Checkboxes sont utilisés pour activer la main-commande le long d'axes spatiaux sélectionnés. Le bouton "Démarrer" lance le flux de données entre les MCS, TipControl et RVS selon le schéma de la figure 3. Bouton "Pause" arrête le flux de données. Bouton "Reset All" définit toutes les RVS tensions à zéro.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
Pour la visualisation des données expérimentales (pointe trajectoire, I, Af) une tête montée affichage (HMD) est utilisé. Le HMD offre une vue stéréoscopique (affichage split HD – moitié pour chaque oeil, 1.920 x 1.080 pixels à 75 Hz). Une caméra infrarouge dédiée suit la position et l'orientation de la HMD dans l'espace 3D en utilisant LED IR fixes sur la surface de la HMD. Le système de suivi HMD permet à l'opérateur de changer la vue à l'intérieur de la scène de réalité virtuelle 3D par un tour de leur tête ou se déplaçant simplement leur corps.
Le logiciel écrit sur mesure "VRinterface" recueille les données à la fois de SPM et MCS, rend dans la scène 3D en utilisant OpenGL et l'affiche dans le HMD avec l'aide du kit de développement logiciel de HMD (SDK). VRinterface récupère le x- réelle, z, coordonnées y- de la pointe directement à partir de lalogiciel de pointe (quelques millisecondes de latence) tandis que les signaux I et Af sont lues directement à partir des sorties de l'électronique de SPM (latence ≈ 250 msec). La figure 5 montre une capture d' écran de la scène virtuelle 3D comme vu par l'opérateur portant HMD pendant HCM. A l'intérieur de la scène virtuelle 3D la pointe apex est rendu sous la forme d'une sphère blanche. La coloration des trajectoires de pointe enregistrées reflète les valeurs de l'un rondin (I (x, y, z)) ou Af (x, y, z). Commutation entre log (I (x, y, z)) ou Af (x, y, z) les modes de couleur se fait par la pression d'un bouton. Un autre bouton lance l'enregistrement (et l'affichage) de données pointe de trajectoires expérimentales. Lorsque vous appuyez à nouveau sur le bouton arrête l'enregistrement. La scène virtuelle montre également une molécule PTCDA statique qui est utilisée comme une aide visuelle au cours de la manipulation. L'opérateur aligne son orientation manuellement pour adapter l'orientation de la molécule réelle sur la surface en utilisant les touches sur un clavier.
Attention: Parce que la tête tdébourbage HMD repose sur LED IR, il peut interférer avec le MCS, car il utilise également la lumière infrarouge pour suivre la position de TO. Donc doit avoir une forme unique reconnu par le MCS. Cela permet MCS de discriminer entre les signaux qui viennent de TO et ceux qui viennent de DEL IR de HMD.
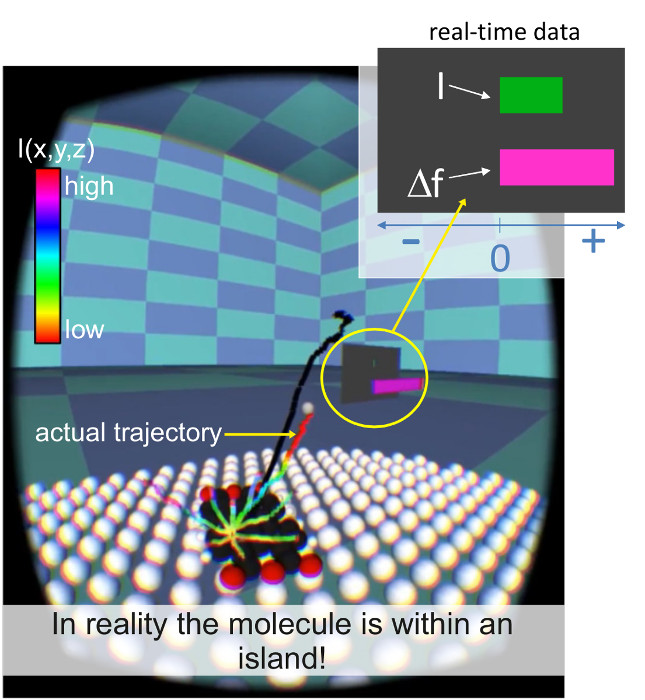
Figure 5. S creenshot de la scène 3D virtuelle affichée à l'opérateur en HMD pendant HCM. Un ensemble de sphères blanches constitue un modèle Ag (111) surface. L'orientation de la surface du modèle peut ne pas coïncider avec l'orientation de l'échantillon. Un modèle de la molécule PTCDA est placée au-dessus de la surface du modèle. C, O, H atomes de PTCDA sont représentés en noir, rouge et blanc, respectivement. Aux fins de commodité azimutale orientation de la molécule modèle peut être ajusté en fonction de l'orientation de la molécule réelle choisiepour la manipulation. La position de pointe est marquée par une seule sphère blanche représentant la plus externe atome pointe de l'apex. Le temps réel I (x, y, z) et Af (x, y, z) les données sont affichées sous forme d'indicateurs de barres placés à côté de la pointe. Auparavant enregistrés ainsi que les manipulations en cours d'exécution sont affichées comme des trajectoires 3D dont la couleur représente soit log (I (x, y, z)) ou Af (x, y, z) les valeurs mesurées à des positions de la trajectoire correspondant. La figure montre les trajectoires qui sont colorées avec log (I x, y, z) () le signal. Le contraste des couleurs peut être commuté entre log (I (x, y, z)) et Af (x, y, z) modes par pression d'un bouton. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
