La non-contatto a forza atomica / microscopio a effetto tunnel a bassa temperatura (LT NC-AFM / STM, in seguito SPM semplicemente chiamato) è lo strumento di scelta per atomicamente precisa manipolazione di singoli atomi o molecole 1 – 3. manipolazione SPM-based è tipicamente limitato a due dimensioni e consiste in una serie di eventi di manipolazione bruschi e spesso stocastici (salti). Questo limita essenzialmente controllo sul processo. Contattare la molecola in questione da un singolo legame chimico in una posizione ben definita atomico porta ad un approccio che può superare queste limitazioni 4 – 9. Durante la sua manipolazione molecola contatto è collegato alla punta SPM modo che muove la molecola nelle tre dimensioni mediante opportuni spostamenti della punta diventa possibile. Ciò crea la possibilità di varie procedure di manipolazione complesse eseguite nello spazio 3D. Tuttavia la manipolazione può essere contattato hindered da interazioni della molecola manipolato con la superficie e / o altre molecole nel suo ambiente, che può creare forze che sono grandi abbastanza per rompere il contatto punta-molecola. Pertanto una particolare traiettoria 3D della punta SPM può o non può causare un evento di manipolazione successo. Una domanda si pone quindi come definire i protocolli che portano al completamento con successo di manipolazione nelle circostanze in cui il legame punta molecola ha una resistenza limitata, mentre le interazioni della molecola manipolato con l'ambiente non sono a priori ben caratterizzati.
Qui la questione si avvicina nel immaginabile modo più intuitivo. Lo sperimentatore è permesso di controllare gli spostamenti della punta SPM semplicemente muovendo la mano 7. Ciò si ottiene accoppiando la SPM ad un sistema di motion capture commerciale, alcune delle specifiche di cui sono forniti di seguito. Il vantaggio di "manipolazione controllata mano" (HCM) è in tha la capacità di sperimentatore di provare diverse traiettorie di manipolazione in modo rapido e imparare da loro successo o il fallimento.
La configurazione HCM è stato utilizzato per condurre un esperimento di prova di principio in cui una parola ( "JÜLICH") è stato imitazioni in uno strato chiuso di perilene-3,4,9,10-tetracarbossilico dianidride (PTCDA) molecole su Ag ( 111), eliminando 48 molecole, una ad una, con HCM 7. Sollevamento una molecola dalle fende superficie i suoi legami idrogeno intermolecolari che legano le molecole in monostrato 10. Tipicamente la forza totale degli attuali legami intermolecolari supera la forza del singolo legame chimico tra l'atomo più esterno della punta e un atomo di ossigeno carbossilico PTCDA con cui la molecola viene contattato (vedi Figura 1). Questo può portare alla rottura del contatto punta-molecola e la seguente fallimento del tentativo di manipolazione. Il compito del sperimentatore è quindi quello di determine una traiettoria punta che rompe i legami intermolecolari resistenti sequenziale piuttosto che simultaneamente, in modo che la forza totale applicata al contatto punta-molecola non eccede mai la sua forza.
Sebbene la traiettoria desiderata può in linea di principio essere simulata, a causa delle dimensioni e della complessità del sistema coinvolto simulazioni necessarie vorrebbe un proibitivamente grande quantità di tempo. In contrasto a ciò, utilizzando HCM è stato possibile rimuovere la prima molecola dopo 40 minuti. Verso la fine dell'esperimento estrazione ha già molto meno tempo che conferma l'efficacia della procedura di apprendimento. Inoltre, la precisione e la versatilità del metodo CMI è stato evidenziato in atto di manipolazione inverso quando una molecola estratta dalla posizione vicina è stato utilizzato per chiudere il vuoto lasciato dopo la rimozione errata di un'altra molecola del monostrato.
approccio motion capture, pur essendo veloce e intuitivo, èlimitato alla produzione di dati tip-traiettoria. Per ulteriore sviluppo sistematico di nuovi protocolli di manipolazione molecolare è altrettanto importante essere in grado di visualizzare i dati punta traiettoria in tempo reale, nonché per analizzare i dati generati in precedenza. Pertanto, la funzionalità della configurazione HCM è rafforzata notevolmente con l'aggiunta di occhiali per la realtà virtuale che consentono sperimentalista per vedere i dati tracciati nella scena virtuale in 3D in cui la traiettoria punta è aumentata dalla corrente (I) e spostamento di frequenza dei valori (Af) misurati dalla SPM in tempo reale 8 (vedi sotto). In aggiunta a ciò, la scena realtà virtuale mostra un modello della molecola manipolato che funge da riferimento scala visiva. Così la configurazione HCM accompagnato da l'interfaccia di realtà virtuale è adatto per la mappatura sistematica dello spazio manipolazione traiettoria e successiva affinamento dei protocolli di manipolazione promettenti. Oltre a ciò il sistema facilita anche il trasferimento di conoscenze tra desperimenti ifferent. I paragrafi seguenti forniscono una descrizione della configurazione e alcune delle sue caratteristiche rilevanti per esperimenti di manipolazione.
Gli esperimenti vengono eseguiti in ultra-alto vuoto (UHV) ad una pressione di base di 1 x 10 -10 mbar con un SPM commerciale costituito da una camera di preparazione e di una camera di analisi. La camera di preparazione è dotato di: Ar + di base utilizzato per sputtering campione, il trasferimento del campione tramite manipolatore (permette il riscaldamento e il raffreddamento di un campione), la diffrazione a bassa energia degli elettroni (LEED), una cella di Knudsen personalizzato (K-cell) contenente PTCDA in polvere purificato per sublimazione. La camera di analisi è dotata di: LN 2 bagni criostato con un volume di 12 L e un tempo di 46 ore la detenzione, LHe bagno criostato (5 L, 72 ore), Besocke 11 coleottero tipo SPM dotato di un sensore diapason 12 ( TFS) costituito da un diapason al quarzo con una punta PTIR collegato elettricamente (funzionamento STM), Che viene tagliato e affilata da un fascio ionico focalizzato (FIB) (Figura 2).
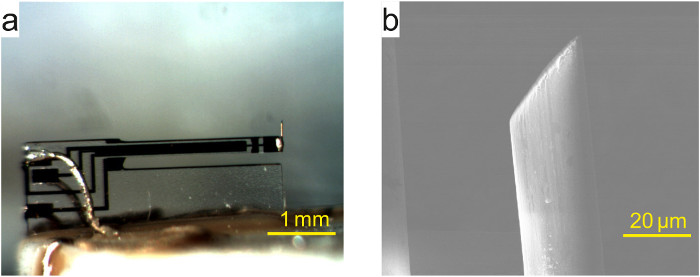
Figura 2. sintonia sensore a forcella. (A) Immagine di un sensore diapason commerciale con annesso punta PTIR. (B) SEM immagine della punta apice PTIR tagliare con FIB. Cliccate qui per vedere una versione più grande di questa figura.
L'AFM funziona in modalità a modulazione di frequenza (FM) 13 dove il TFS è eccitato alla risonanza (f 0 ≈ 31.080 Hz) con un piezo dither. Il segnale piezoelettrico del diapason oscillante viene amplificato e utilizzato da un anello ad aggancio di fase (PLL), che mantiene l'ampiezza di oscillazione costante del TFS e tiene traccia delle modifiche di its frequenza di risonanza, Af = f – f 0, che proviene dal gradiente della forza agente sulla punta. Come mostrato in figura 3 la posizione della punta SPM è controllato da tensioni (u x, y u, u z) applicato ad un insieme di assi X, Y, Z-piezo (costanti piezoelettrici a 5 K: x = 15, y = 16, z = 6 A / V). L'u x, y u, u z -voltages (± 10 V con una risoluzione di 20 bit) sono generati in corrispondenza delle uscite di elettronica SPM. Sono ulteriormente amplificati da un amplificatore ad alta tensione (HV) che ha una tensione di uscita massima di ± 200 V.
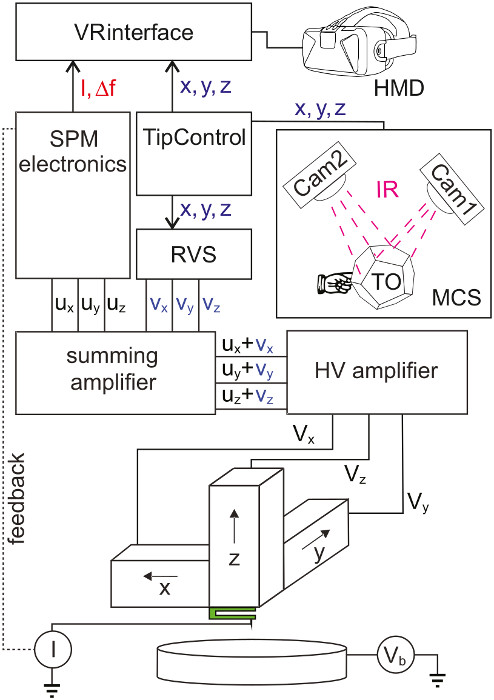
Figura 3. Schema del setup HCM. La posizione (oggetto tracciato) per che dispone di più (infrarossi) fonti IR installati sulla sua superficie viene monitorata da due telecamere a infrarossi del sistema di motion capture (MCS). TipControl cosìottiene ftware il TO coordinate (x, y, z) da MCS e lo passa alla sorgente di tensione a distanza (RVS) che genera una serie di tensioni (v x, v y, v z) che sono riassunta con le tensioni (u x , u y, z u) ha prodotto dall'elettronica SPM per il controllo della posizione della punta SPM. La tensione aggiunto passa attraverso un amplificatore ad alta tensione (HV) ed è ulteriormente applicato al sistema piezo-posizionamento della punta SPM. La configurazione permette il controllo manuale del posizionamento punta quando l'anello di retroazione SPM (FB) è aperto. La posizione (x, y, z) della punta così come I (x, y, z) e Af (x, y, z) sono passati al software VRinterface che traccia nella scena virtuale in 3D visto da parte dell'operatore indossare il head-mounted display (HMD). clicca qui per vedere una versione più grande di questa figura.
La corrente di tunneling che scorre tra la punta e SPMla superficie è misurata da un amplificatore a transimpedenza con un guadagno variabile che va da 1 x 10 3 al 1 x 10 9 V / A (larghezza di banda a guadagno 1 x 10 9 V / A è 1 kHz). L'uscita dell'amplificatore è alimentato nel circuito di retroazione STM (FB) per regolare l'altezza della punta di sopra della superficie in modalità di scansione corrente costante. La stabilità della giunzione (con l'oscillazione TFS spento) è 1-3 pm. Il segnale di oscillazione piezoelettrico del TFS è amplificato in due fasi: (1) preamplificatore fissato allo schermo LN 2 (guadagno 1 x 10 8 V / A, banda di 20 kHz), e (2) amplificatore di tensione esterna con guadagno variabile da 1 x 10 1 a 5 x 10 4 e una larghezza di banda di 1 MHz.
Per gli esperimenti HCM, la messa a punto SPM è esteso con: sistema di motion capture (MCS), fonte di tensione multicanale controllabile a distanza (RVS), amplificatore sommando e la testa della realtà virtuale montata display (HMD). Tutti i dispositivi elencati, ad eccezione della Summing amplificatore sono stati acquisiti in commercio.
MSC è un infrarossi (IR) del sistema marcatore-tracking che permette la risoluzione millimetro di spostamenti spaziali ad una velocità di 100 Hz. Il sistema è composto da due telecamere IR, un oggetto tracciabile (TO) e il software di controllo. Il software MCS ottiene le assi X, Y, Z-coordinate del TO nello spazio 3D analizzando le sue immagini ottenute dalle due telecamere. MCS fornisce una libreria di programmazione che permette l'uso delle coordinate di TO in un software separato.
Le coordinate di a (x AI, Y per, z TO) sono passati ad un programma di software personalizzato sviluppato "TipControl". La figura 4 mostra uno screenshot dell'interfaccia utente grafica. Il software viene attivato dal pulsante "start" nella finestra. Dopo l'attivazione (τ = 0) il software imposta tutte le v x -, v y -, v z -voltages su RVS (campo di tensione ± 10 V a 16bit di risoluzione, 50 msec latenza per step tensione) secondo la seguente espressione  ecc, dove c x, y c, c z sono i fattori che convertono 5 cm dello spostamento di TO in 1 Å spostamento della punta SPM. I fattori di p x (t), p y (t), p z (t) hanno valori definiti dallo stato della x, y, z-caselle di controllo nella finestra del software. Se la casella è selezionata, il p corrispondente (t) è impostato a 1. Tutti p (t) sono impostati a 0 nel momento in cui viene premuto il tasto "pausa" nella finestra del software. Ciò consente all'operatore di temporaneamente "congelare" la posizione della punta. Premendo il pulsante "Reset All" nella finestra del software imposta v x -, v y -, v z -voltages a zero che restituisce la punta alla sua posizione iniziale definita dal software SPM. Il campo di testo "comando manuale RVS" nella finestra del software CA n essere utilizzato per impostare una delle v x -, v y -, v z -voltages su qualsiasi valore nell'intervallo consentito di ± 10 V. Il v x -, v y -, v z -voltages generato da RVS sono aggiunti alla u x -, u y -, u z segnali di tensione -output di elettronica SPM attraverso un amplificatore di somma (guadagno 1, larghezza di banda di 50 kHz, campo di uscita ± 10 V).
ecc, dove c x, y c, c z sono i fattori che convertono 5 cm dello spostamento di TO in 1 Å spostamento della punta SPM. I fattori di p x (t), p y (t), p z (t) hanno valori definiti dallo stato della x, y, z-caselle di controllo nella finestra del software. Se la casella è selezionata, il p corrispondente (t) è impostato a 1. Tutti p (t) sono impostati a 0 nel momento in cui viene premuto il tasto "pausa" nella finestra del software. Ciò consente all'operatore di temporaneamente "congelare" la posizione della punta. Premendo il pulsante "Reset All" nella finestra del software imposta v x -, v y -, v z -voltages a zero che restituisce la punta alla sua posizione iniziale definita dal software SPM. Il campo di testo "comando manuale RVS" nella finestra del software CA n essere utilizzato per impostare una delle v x -, v y -, v z -voltages su qualsiasi valore nell'intervallo consentito di ± 10 V. Il v x -, v y -, v z -voltages generato da RVS sono aggiunti alla u x -, u y -, u z segnali di tensione -output di elettronica SPM attraverso un amplificatore di somma (guadagno 1, larghezza di banda di 50 kHz, campo di uscita ± 10 V).
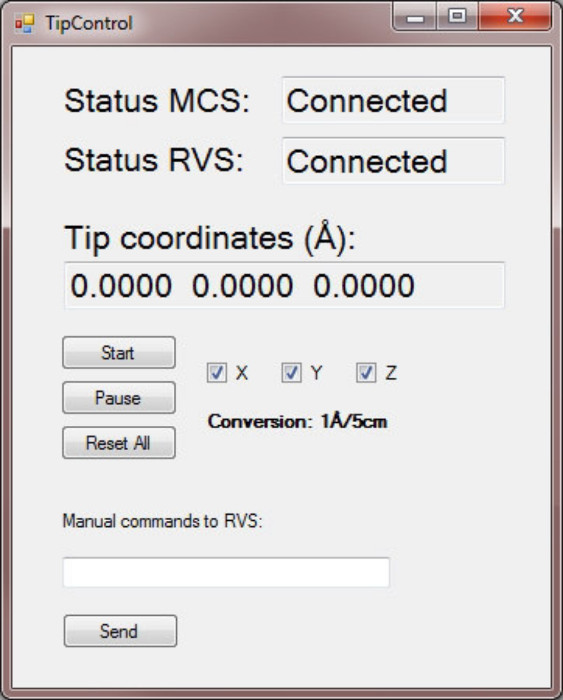
Figura 4. Schermata della finestra di interfaccia. Due indicatori mostrano lo stato della connessione con sistemi MCS e RVS. Le caselle di controllo vengono utilizzati per attivare mano-controllo lungo gli assi spaziali selezionati. Il pulsante "Start" inizia il flusso di dati tra MCS, TipControl e RVS secondo lo schema mostrato in figura 3. Button "Pausa" interrompe il flusso di dati. Pulsante "Reset totale" imposta tutti RVS tensioni a zero.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Clicca qui per vedere una versione più grande di questa figura.
Per la visualizzazione dei dati sperimentali (punta traiettoria, io, Af) viene utilizzato un head-mounted display (HMD). Il HMD fornisce una visione stereoscopica (display diviso HD – una metà per ogni occhio, 1.920 x 1.080 pixel a 75 Hz). Una telecamera IR dedicato traccia la posizione e l'orientamento HMD nello spazio 3D mediante IR-LED montati sulla superficie HMD. Il sistema di inseguimento HMD consente all'operatore di modificare la vista all'interno della scena realtà virtuale 3D da un giro di testa o semplicemente muovendo il loro corpo.
Il software personalizzato scritto "VRinterface" raccoglie i dati sia dal SPM e MCS, rende nella scena 3D utilizzando OpenGL e lo visualizza nel HMD con l'aiuto del kit di sviluppo software HMD (SDK). VRinterface recupera il X attuale, y-, z coordinate della punta direttamente dalsoftware di punta (pochi millisecondi di latenza), mentre segnali I e Af vengono letti direttamente dalle uscite dei componenti elettronici SPM (latenza ≈ 250 msec). La Figura 5 mostra uno screenshot della scena virtuale in 3D come visto da parte dell'operatore indossando HMD durante HCM. All'interno della scena virtuale in 3D l'apice punta è reso come una sfera bianca. La colorazione delle traiettorie punta registrate riflette i valori di entrambi log (I (x, y, z)) o Af (x, y, z). La commutazione tra log (I (x, y, z)) o Af (x, y, z) modalità di colore è fatto dal pressione di un tasto. Un altro pulsante avvia la registrazione (e la visualizzazione) dei dati sperimentali punta di traiettoria. Quando si preme nuovamente il pulsante si ferma la registrazione. La scena virtuale mostra anche una molecola PTCDA statico che viene utilizzato come supporto visivo durante la manipolazione. L'operatore allinea il suo orientamento manualmente per adattarsi all'orientamento del reale molecola sulla superficie utilizzando i tasti su una tastiera.
Attenzione: perché la testa ttravaso di HMD si basa su IR-LED, potrebbe interferire con la MCS in quanto utilizza anche la luce a infrarossi per tenere traccia della posizione del TO. Quindi deve avere una forma unica riconosciuta dalla MCS. Questo aiuta MCS di discriminare tra i segnali che provengono da TO e quelli provenienti da IR-LED di HMD.
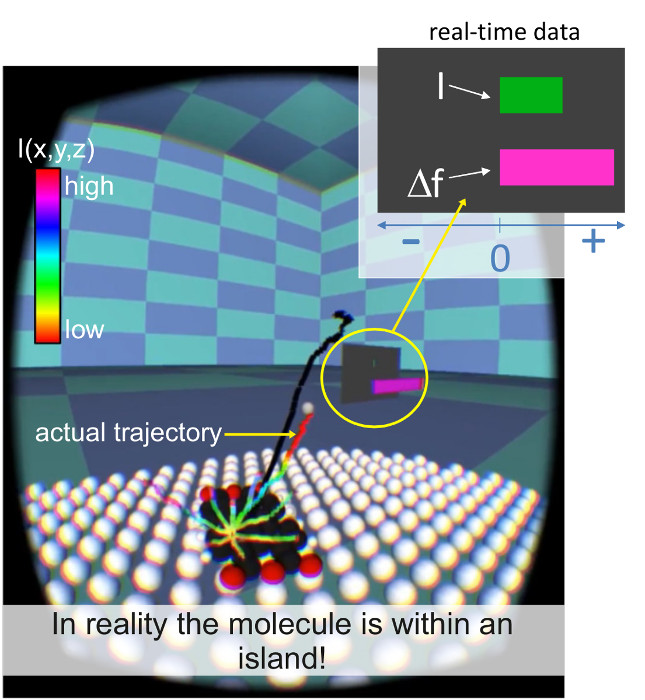
Figura 5. S creenshot della scena virtuale in 3D visualizzato all'operatore in HMD durante HCM. Un insieme di sfere bianche costituisce un modello Ag (111) di superficie. Orientamento della superficie del modello non può necessariamente coincidere con l'orientamento del campione. Un modello della molecola PTCDA è disposto sopra la superficie del modello. C, O, H atomi di PTCDA sono mostrati in nero, rosso e bianco, rispettivamente. Ai fini dell'orientamento convenienza azimutale della molecola modello può essere regolato per adattarsi all'orientamento del reale molecola presceltaper la manipolazione. La posizione della punta è segnata da una singola sfera bianco che rappresenta il più esterno dell'atomo punta apice. Il tempo reale I (x, y, z) e Af (y x, z,) i dati vengono visualizzati come indicatori a barre posti vicino alla punta. Registrato in precedenza nonché le manipolazioni attualmente effettuate sono visualizzati come traiettorie 3D il cui colore rappresenta o log (I (x, y, z)) (y, x, z) valori Af misurata in posizioni della traiettoria corrispondente o. La figura mostra le traiettorie che sono di colore con log (x, y,) I (z) del segnale. Il contrasto di colore può essere commutato tra log (I (x, y, z)) e Af (x, y, z) le modalità di pressione di un pulsante. Clicca qui per vedere una versione più grande di questa figura.
