O não-contato microscópio de baixa temperatura atomic force / varredura por tunelamento (LT NC-AFM / STM, na seguinte SPM simplesmente chamado) é a ferramenta de escolha para a manipulação atomicamente precisa de átomos ou moléculas individuais 1 – 3. manipulação baseada-SPM é normalmente limitada a duas dimensões e é composto de uma série de eventos de manipulação frequentemente bruscas e estocásticos (saltos). Isto limita essencialmente o controlo sobre o processo. Entrando em contato com a molécula em questão por uma única ligação química em uma posição atômica bem definida leva a uma abordagem que pode superar essas limitações 4 – 9. Ao longo da sua manipulação da molécula contactado está ligado à ponta SPM de modo que movendo a molécula em todas as três dimensões apropriadas por deslocamentos da ponta torna-se possível. Isto cria a possibilidade de vários procedimentos de manipulação complexa realizados no espaço 3D. No entanto, a manipulação de contacto pode ser oindered por interações da molécula manipulado com a superfície e / ou outras moléculas nas suas imediações, o que pode criar forças que são grandes o suficiente para romper o contato tip-molécula. Por conseguinte, uma trajectória 3D particular da ponta SPM pode ou não resultar em um evento de manipulação bem sucedida. A pergunta surge, assim, como definir os protocolos que levam a conclusão bem sucedida de manipulação nas circunstâncias quando o vínculo tip-molécula tem uma força limitada, enquanto que as interações da molécula manipulado com o seu ambiente não são a priori bem caracterizados.
Aqui esta questão é abordada na imagináveis maneira mais intuitiva. O experimentador é permitido controlar os deslocamentos da ponta SPM simplesmente movendo o seu lado 7. Isto é conseguido pelo acoplamento do SPM para um sistema de captura de movimento comercial, algumas das especificações das quais são fornecidos abaixo. A vantagem de "manipulação controlada mão" (HCM) está em tele a capacidade do experimentador para experimentar diferentes trajetórias de manipulação de forma rápida e aprender com o seu fracasso ou sucesso.
A configuração CMH foi usado para efectuar um ensaio de prova de princípio em que uma palavra ( "JÜLICH") foi estampado com uma camada fechada de moléculas de perileno-3,4,9,10-tetracarboxílico dianidrido (PTCDA) em Ag ( 111), a remoção de 48 moléculas, uma por uma, com HCM 7. Levantamento de uma molécula a partir das cliva superfície suas ligações de hidrogénio intermoleculares que se ligam às moléculas na monocamada 10. Tipicamente, a força total das presentes ligações intermoleculares excede a força da ligação química entre o átomo único mais externa da ponta e um átomo de oxigénio carboxílico de PTCDA através da qual a molécula é contactado (ver Figura 1). Isso pode levar à ruptura do contato tip-molécula e a seguinte falha da tentativa de manipulação. A tarefa do pesquisador é, assim, para determine uma trajectória ponta que rompe as ligações intermoleculares que resistem sequencialmente em vez de simultaneamente, de modo que a força total aplicada ao contacto da ponta-molécula nunca excede a sua força.
Embora a trajectória desejada pode, em princípio, ser simulado, devido ao tamanho e complexidade do sistema envolvido as simulações necessárias levaria um proibitivamente grande quantidade de tempo. Em contraste com o que, usando o HCM, foi possível remover a primeira molécula após 40 minutos. Perto do final da experiência a extracção já teve muito menos tempo que confirma a eficácia do processo de aprendizagem. Além disso, a precisão e versatilidade do método CMH foi evidenciado no acto de manipulação inverso quando uma molécula extraída a partir do local vizinho foi usada para fechar o vazio deixado após a remoção errónea de uma outra molécula a partir da monocamada.
abordagem de captura de movimento, sendo rápida e intuitiva, élimitada à geração de dados ponta-de trajetória. Para mais desenvolvimento sistemático de novos protocolos de manipulação molecular é igualmente importante para ser capaz de visualizar os dados ponta trajetória em tempo real, bem como para analisar os dados gerados anteriormente. Portanto, a funcionalidade da configuração do HCM é reforçada substancialmente pela adição de óculos de realidade virtual que permitem a experimentalista para ver os dados representados no cenário virtual em 3D, onde a trajetória da ponta é aumentada pela corrente (I) e desvio de frequência (Af) valores medidos pela SPM em tempo real 8 (ver abaixo). Além disso, a cena da realidade virtual mostra um modelo da molécula manipulado que serve como uma referência escala visual. Assim, a configuração do HCM complementada pela interface de realidade virtual é adequado para mapeamento sistemático do espaço manipulação trajetória e refinamento sucessivo dos protocolos de manipulação promissores. Além disso, o sistema também facilita a transferência de conhecimentos entre dexperimentos IFERENTES. Os parágrafos seguintes fornecem uma descrição da configuração e algumas das suas especificações que são relevantes para as experiências de manipulação.
As experiências são realizadas em vácuo ultra-alto (UHV), a uma pressão de base de 1 x 10 -10 mbar com uma SPM comercial que consiste numa câmara de preparação e uma câmara de análise. A câmara de preparação está equipado com: Ar + fonte utilizado para pulverização de exemplo, a transferência de amostra via manipulador (permite aquecimento e arrefecimento de uma amostra), difração de baixa energia de elétrons (LEED), uma personalizado Knudsen celular (células K) contendo PTCDA pó purificado por sublimação. A câmara de análise está equipado com: LN 2 banho criostato com um volume de 12 L e um tempo de espera de 46 horas, LHe banho de criostato (5 L, 72 horas), Besocke 11 do tipo besouro SPM equipado com um sensor de diapasão 12 ( TFS) que consiste de um garfo de afinação de quartzo com uma ponta PtIr ligado electricamente (para a operação MCT), Que é cortada e aguçada por um feixe de iões focado (FIB) (Figura 2).
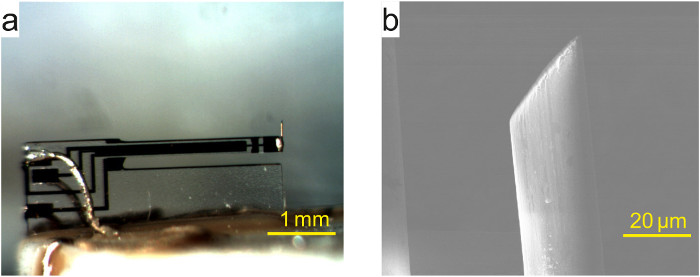
Figura 2. Ajuste sensor de garfo. (A) Imagem de um sensor de diapasão comercial com ponta PtIr anexado. (B) imagem SEM do ápice ponta PtIr cortado com FIB. Por favor clique aqui para ver uma versão maior desta figura.
A AFM é operado no modo de frequência modulada (FM) 13 onde o TFS está animado com a ressonância (f 0 ≈ 31.080 Hz) com um piezo exaltação. O sinal piezoeléctrico do garfo oscilante é amplificado e utilizado por um circuito de bloqueio de fase (PLL), o qual mantém a amplitude de oscilação constante do TFS e controla as alterações de iTS frequência de ressonância, Af = F – F 0, que se origina a partir do gradiente da força que actua sobre a ponta. Como mostrado na Figura 3, a posição da ponta da SPM é controlado por tensão (U x, u y, z L) aplicado a um conjunto de x, y, z-piezos (constantes piezo a 5 K: x = 15, y = 16, z = 6 A / V). A u x, u y, u -voltages z (± 10 V com resolução de 20 bits) são gerados nas saídas de eletrônicos SPM. Eles são ainda mais amplificado por um amplificador de alta voltagem (HV) que tem uma tensão de saída máxima de ± 200 V.
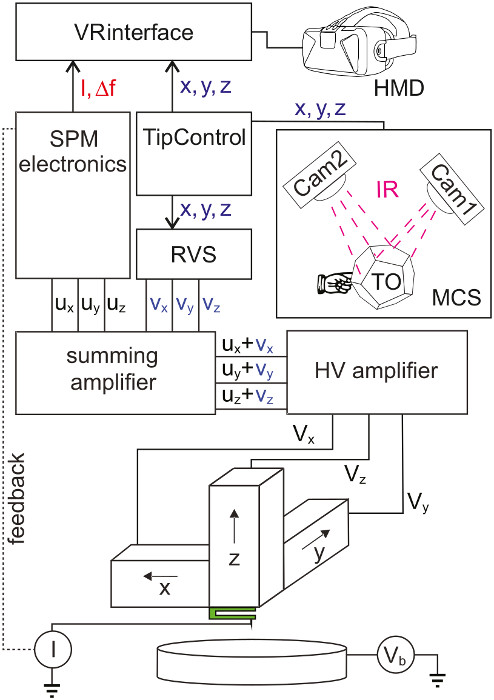
Figura 3. Esquema da configuração HCM. A posição (objeto rastreado) A que tem vários (infravermelho) fontes IR instalados em sua superfície é rastreado por duas câmeras de infravermelho do sistema de captura de movimento (MCS). TipControl assimftware obtém o TO coordenadas (x, y, z) de MCS e passa para a fonte de tensão remota (RVS), que gera um conjunto de tensões (v x, v y, v z) que são somados com as tensões (u x , u y, u z) produzidas pelo sistema eletrônico SPM para o controle da posição da ponta da SPM. A tensão adicionado passa através de um amplificador de alta voltagem (HV) e é ainda aplicada ao sistema de piezo-posicionamento da ponta do SPM. A configuração permite o controle manual do posicionamento dica quando o ciclo de feedback SPM (FB) é aberta. A posição (x, y, z) da ponta, bem como I (x, y, z) e Af (X, Y, Z) são passados para o software VRinterface que traça-lo na cena virtual em 3D visto pelo operador vestindo o head-mounted display (HMD). por favor clique aqui para ver uma versão maior desta figura.
A corrente de tunelamento que flui entre a ponta da SPM ea superfície é medido por um amplificador de transimpedância com um ganho variável que varia de 1 x outubro 3-1 x 10 9 V / A (largura de banda de ganho de 1 x 10 9 V / A é de 1 kHz). A saída do amplificador é alimentado no circuito fechado de realimentação de STM (FB) para regular a altura da ponta acima da superfície em modo de exploração corrente constante. A estabilidade da junção (com a oscilação TFS desligado) é 1-3 pm. O sinal de oscilação piezoeléctrico do TFS é amplificado em duas etapas: (1) pré-amplificador fixado à blindagem LN 2 (ganho de 1 x 10 8 V / A, de largura de banda de 20 kHz), e (2) amplificador de tensão externa com ganho variável de 1 1 x 10 a 5 x 10 4 e uma largura de banda de 1 MHz.
Para experiências de HCM, a configuração SPM é estendido com: sistema de motion capture (MCS), fonte de tensão multicanal remotamente controláveis (RVS), amplificador de soma e de cabeça realidade virtual montado display (HMD). Todos os dispositivos listados, exceto o summing amplificador foram adquiridos comercialmente.
MSC é uma (IR) sistema infravermelho marcador de rastreamento que permite resolução milímetro de deslocamentos espaciais a uma taxa de 100 Hz. O sistema consiste em dois IR câmeras, um objeto rastreável (TO) e o software de controle. O software MCS obtém os x, y, z-coordenadas da TO no espaço 3D através da análise de suas imagens obtidas pelas duas câmaras. MCS fornece uma biblioteca de programação que permite o uso das coordenadas do TO em um programa de software separado.
As coordenadas de a (x TO, y para, z TO) são passados para um programa de software customizado "TipControl". A Figura 4 mostra uma captura de tela da interface gráfica do usuário. O software é ativado pelo botão "Iniciar" na janela. Após a ativação (τ = 0), o software define todas v x -, v y -, v z -voltages na RVS (faixa de tensão ± 10 V a 16resolução de bits, 50 de latência ms por degrau de tensão) de acordo com a seguinte expressão  etc, em que C, X c Y, c Z são os factores que convertem a 5 cm do deslocamento de A em 1 de deslocamento A da ponta da SPM. O factores p x (t), P y (t), z p (t) têm valores definidos pelo estado do x, y, z-caixas na janela do software. Se a caixa estiver marcada, então o p correspondente (t) é definido como 1. Todos os p (t) são definidos como 0 no momento em que o botão "pause" é pressionado na janela do software. Isso permite ao operador temporariamente "congelar" a posição da ponta. Pressionando o botão "reset all" na janela do software define v x -, v y -, v z -voltages a zero que retorna a ponta para a posição inicial definida pelo software SPM. O campo de texto "comando manual para RVS" no ca janela de software n ser usado para definir qualquer um dos v x -, v y -, v z -voltages para qualquer valor na faixa permitida de ± 10 V. O v x -, v y -, v z -voltages gerado pela RVS são adicionados ao u x -, u y -, u sinais de tensão -output z da eletrônica SPM através de um amplificador de soma (ganho 1, largura de banda de 50 kHz, intervalo de saída ± 10 V).
etc, em que C, X c Y, c Z são os factores que convertem a 5 cm do deslocamento de A em 1 de deslocamento A da ponta da SPM. O factores p x (t), P y (t), z p (t) têm valores definidos pelo estado do x, y, z-caixas na janela do software. Se a caixa estiver marcada, então o p correspondente (t) é definido como 1. Todos os p (t) são definidos como 0 no momento em que o botão "pause" é pressionado na janela do software. Isso permite ao operador temporariamente "congelar" a posição da ponta. Pressionando o botão "reset all" na janela do software define v x -, v y -, v z -voltages a zero que retorna a ponta para a posição inicial definida pelo software SPM. O campo de texto "comando manual para RVS" no ca janela de software n ser usado para definir qualquer um dos v x -, v y -, v z -voltages para qualquer valor na faixa permitida de ± 10 V. O v x -, v y -, v z -voltages gerado pela RVS são adicionados ao u x -, u y -, u sinais de tensão -output z da eletrônica SPM através de um amplificador de soma (ganho 1, largura de banda de 50 kHz, intervalo de saída ± 10 V).
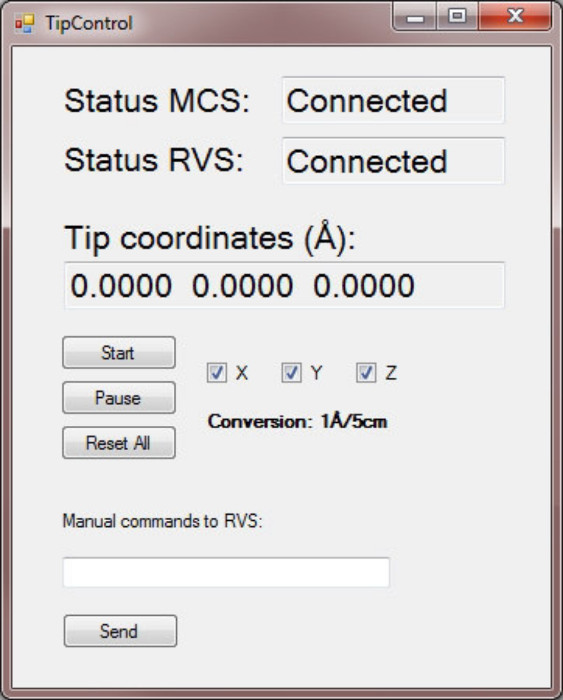
Figura 4. Captura de tela da janela de interface. Dois indicadores exibem o status da conexão com sistemas de MCS e RVs. Caixas de seleção são usados para ativar a mão-de controle ao longo de eixos espaciais selecionados. O botão "Start" inicia fluxo de dados entre MCS, TipControl e RVS acordo com o esquema mostrado na Figura 3. Botão "Pause" para o fluxo de dados. Botão "Reset All" define todas as RVS tensões a zero.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Clique aqui para ver uma versão maior desta figura.
Para visualização dos dados experimentais (trajetória dica, I, Af) é usado um head-mounted display (HMD). O HMD fornece uma visão estereoscópica (ecrã dividido HD – metade para cada olho, 1.920 x 1.080 pixels a 75 Hz). Uma câmera IR dedicada rastreia a posição e orientação do HMD no espaço 3D usando IR-LEDs fixos na superfície do HMD. O sistema de rastreamento HMD permite ao operador alterar a vista dentro da cena de realidade virtual 3D por uma volta da sua cabeça ou simplesmente movendo seu corpo.
O software personalizado escrito "VRinterface" recolhe os dados tanto da SPM e MCS, o torna na cena 3D usando OpenGL e exibe no HMD com a ajuda do kit de desenvolvimento de software HMDs (SDK). VRinterface recupera o x- real, Y, Z coordenadas da ponta directamente a partir dosoftware da ponta (alguns latência milissegundo), enquanto sinais I e Af são lidos diretamente a partir dos resultados do electrónica SPM (latência ≈ 250 ms). A Figura 5 mostra uma imagem da cena virtual 3D como visto pelo operador vestindo HMD durante HCM. Dentro do cenário virtual em 3D o ápice da ponta é processado como uma esfera branca. A coloração das trajectórias ponta gravados reflecte os valores de ambos os log (I (x, y, z)) ou Af (x, y, z). Alternando entre log (I (x, y, z)) ou Af (x, y, z) modos de cor é feita pela imprensa de um botão. Outro botão inicia a gravação (e exibir) de dados ponta trajetória experimentais. Quando pressionado novamente o botão pára a gravação. A cena virtual também mostra uma molécula PTCDA estático que é utilizado como uma ajuda visual durante a manipulação. O operador alinha manualmente a sua orientação para ajustar a orientação da molécula real sobre a superfície utilizando as teclas de um teclado.
Cuidado: Porque a cabeça ttrasfega do HMD depende de IR-LED, que pode interferir com o MCS, uma vez que também usa a luz de IV para controlar a posição dos organismos. Portanto, para tem que ter uma forma única reconhecido pelo MCS. Isso ajuda a MCS para discriminar entre os sinais que vêm de TO e aqueles provenientes de IR-LEDs de HMD.
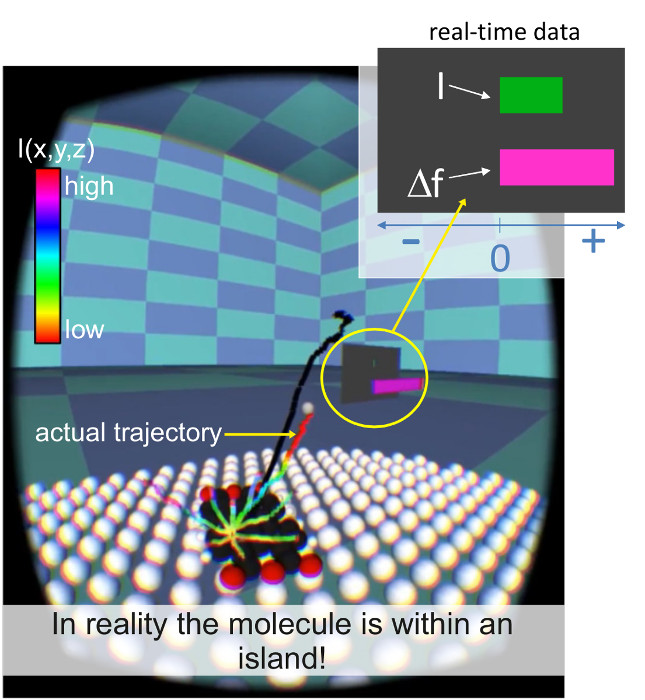
Figura 5. S creenshot da cena virtual 3D exibido para o operador em HMD durante HCM. Um conjunto de esferas brancas constitui um modelo Ag (111) de superfície. Orientação de superfície do modelo pode não coincidem necessariamente com a orientação da amostra. Um modelo da molécula PTCDA é colocado acima da superfície do modelo. C, O, átomos de H de PTCDA são mostrados em preto, vermelho e branco, respectivamente. Para efeitos de conveniência orientação azimutal da molécula modelo pode ser ajustado de acordo com a orientação da molécula verdadeira escolhidopara manipulação. A posição da ponta é marcada por uma única esfera branca que representa o átomo de ponta ápice mais externa. O tempo real I (x, y, z) e Af (x, y, z) os dados são apresentados como indicadores de barras colocados ao lado da ponta. Gravadas anteriormente, bem como as manipulações actualmente executadas são exibidas como trajectórias 3D cuja cor representa ou log (I (x, y, z)) ou (X, Y, Z) Af valores medidos nas posições da trajectória correspondente. A figura mostra trajetórias que são coloridas com log (, y, I (x z)) do sinal. O contraste de cores pode ser alternado entre log (I (x, y, z)) e Af (x, y, z) modos de pressionar de um botão. Por favor clique aqui para ver uma versão maior desta figura.
