Низкотемпературный бесконтактной атомно – силовой / сканирующий туннельный микроскоп (LT NC-AFM / STM, в следующем просто называется SPM) является инструментом выбора для атомарно точного манипулирования отдельными атомами или молекулами 1 – 3. манипуляция СЗМ на основе, как правило, ограничен двумя размерами и состоит из ряда резких и часто стохастические события манипуляций (прыжки). Это существенно ограничивает контроль над процессом. Обращение в молекулу в вопросе одной химической связи в четко определенной позиции атомной приводит к подходу , который может преодолеть эти ограничения 4 – 9. На протяжении всей своей манипуляциями контакт молекула соединена с наконечником SPM так, что перемещение молекулы во всех трех измерениях с помощью соответствующих перемещений наконечника становится возможным. Это создает возможность для различных сложных процедур обработки, выполненных в 3D-пространстве. Однако контакт манипуляции может быть приветndered путем взаимодействия управляющей молекулы с поверхностью и / или других молекул в его окрестностях, что может создать силы, которые достаточно велики, чтобы разорвать контакт кончик молекулы. Поэтому конкретный 3D траектория иглы СЗМ может или не может привести к успешному событию манипуляций. Таким образом, возникает вопрос о том, как определить протоколы, которые приводят к успешному завершению манипуляций в обстоятельствах, когда наконечник-молекула связь имеет ограниченную силу, в то время как взаимодействие управляющей молекулы с ее окружением не являются априори хорошо охарактеризованы.
Вот этот вопрос подошел в наиболее интуитивным способом можно себе представить. Экспериментатор разрешается контролировать перемещения иглы СЗМ просто перемещая руку 7. Это достигается путем сочетания SPM для коммерческой системы захвата движения, некоторые спецификации которого приведены ниже. Преимущество "ручным управлением" манипуляции (HCM) в тон способность экспериментатора попробовать различные траектории манипуляции быстро и извлечь уроки из их успеха или неудачи.
Установка HCM была использована для проведения проверка и подтверждение принципа действия эксперимент, в котором слово ( "Юлих") был трафарету в закрытом слое периленовой-3,4,9,10-диангидридом (PTCDA) молекул на Ag ( 111), удаление 48 молекул, один за другим, с HCM 7. Подъем молекулы с поверхности расщепляет ее межмолекулярных водородных связей , которые связывают молекулы в монослое 10. Как правило, полная сила настоящих межмолекулярных связей превышает прочность одной химической связи между крайними атомом наконечника и карбоновой атомом кислорода PTCDA , с помощью которого молекула контактировал (см рисунок 1). Это может привести к разрыву контакта кончика молекулы и последующего провала попытки манипулирования. Задача экспериментатора таким образом, чтобы установпе траекторией наконечник, который ломает сопротивляющиеся межмолекулярных связей последовательно, а не одновременно, так что суммарная сила, приложенная к контакту кончик молекулы никогда не превышает его прочность.
Несмотря на то, желаемой траектории, может в принципе быть смоделирована, из-за размера и сложности системы вовлечены необходимые расчеты займет непомерно большое количество времени. В отличие от этого, с помощью ГКМ можно было удалить первую молекулу через 40 минут. К концу эксперимента добыча приняла уже намного меньше времени, что подтверждает эффективность процедуры обучения. Кроме того, точность и универсальность метода НСМ свидетельствовал в акте обратного манипулирования, когда молекула извлеченный из соседнего местоположения был использован, чтобы закрыть пустоту, оставленную после ошибочного удаления другой молекулы из монослоя.
Motion Capture подход, в то же время быстрый и интуитивно понятный, являетсяограничивается генерацией данных кончика траектории. Для дальнейшего систематического развития новых протоколов молекулярного манипулирования в равной степени важно, чтобы иметь возможность просматривать данные Кончик траектории в режиме реального времени, а также для анализа ранее сгенерированных данных. Таким образом, функциональные возможности установки HCM существенно увеличивается путем добавления виртуальных очки реальности, которые позволяют экспериментатор видеть данные, приведенные на виртуальной сцене 3D, где траектория наконечника пополнен током (I) и сдвиг частоты (; F) значения измеряются по ВПУ в режиме реального времени , 8 (см ниже). Кроме того, виртуальная реальность сцена показана модель управляющего воздействия молекулы, которая служит в качестве визуального эталонной шкалы. Таким образом, установка HCM хвалится интерфейса виртуальной реальности подходит для систематического картирования манипуляции траектории пространства и последовательного уточнения перспективных протоколов манипулирования. Кроме того, система также способствует передаче знаний между дifferent эксперименты. В нижеследующих пунктах приводится описание установки и некоторые из его спецификаций, которые имеют отношение к манипуляции экспериментов.
Эксперименты проводились в сверхвысоком вакууме (СВВ) при базовом давлении от 1 × 10 -10 мбар с коммерческим SPM , состоящей из подготовительной камеры и камеры для анализа. Подготовка камера оснащена: Ar + источник , используемый для образца распыления, переноса образца с помощью манипулятора (позволяет нагрева и охлаждения образца), низкой энергии электронов (ДМЭ), индивидуальные Кнудсена клетки (K-клеток) , содержащий PTCDA порошок очищают с помощью сублимации. Анализ камера оснащена: LN 2 ванны криостата с объемом 12 л и времени выдержки 46 ч, LHe ванны криостата (5 л, 72 ч), Besocke 11 жук типа SPM оснащен датчиком камертона 12 ( TFS), состоящий из кварцевого резонатора с электрически соединенным PTIR наконечником (для работы СТМ), Которая режется и заточены с помощью сфокусированного ионного пучка (FIB) (рисунок 2).
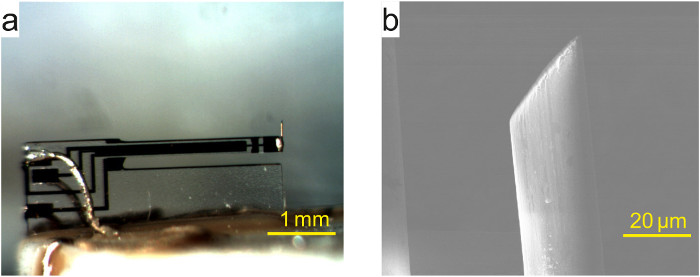
Рисунок 2. Камертон датчика. (А) изображение коммерческого датчика камертона с прикрепленными PTIR наконечником. (Б) SEM изображение кончика зонда PTIR разрезают FIB. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
AFM работает в режиме частотно-модулированной (FM) 13 , где ТФС возбуждается в резонансе (F 0 ≈ 31080 Гц) с шумового пьезо. Пьезоэлектрический сигнал колеблющегося камертона усиливается и используется с помощью фазовой автоматической подстройки частоты (PLL), который удерживает амплитуду колебаний постоянной ССТ и отслеживает изменения ITS – резонансная частота, = F ; F – F 0, что берет свое начало от градиента силы , действующей на кончик. Как показано на рисунке 3 позиция SPM наконечник находится под контролем напряжения (U х, у, г) применяется к набору осей X, Y, Z-piezos (постоянные пьезо при 5 К: х = 15, у = 16, г = 6 A / V). У х, и у, г -voltages (± 10 В при 20 – битным разрешением) генерируются на выходах SPM электроники. Кроме того, они усиливают с помощью высокого напряжения (HV) усилитель, который имеет максимальное выходное напряжение ± 200 В.
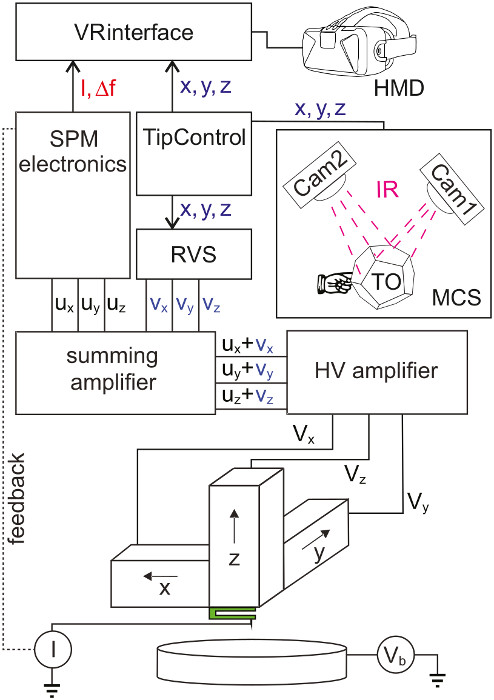
Рисунок 3. Схематическое изображение установки HCM. Положение (отслеживаемого объекта) TO , который имеет несколько (ИК) ИК – источников , установленных на его поверхности отслеживается с помощью двух инфракрасных камер системы захвата движения (MCS). TipControl такftware получает в координаты (х, у, г) от MCS и передает его к источнику удаленного напряжения (РВС) , который формирует набор напряжений (V х, V Y, V г), которые суммируются с напряжениями (и х , у у, г) производится СЗМ электроникой для управления положением SPM наконечника. Дополнительное напряжение проходит через усилитель высокого напряжения (ВН) и далее применяется к системе пьезо-позиционирования иглы СЗМ. Установка позволяет вручную управлять позиционированием наконечника, когда обратная связь СЗМ (FB) петля открыта. Положение (х, у, г) наконечника так же как я (х, у, г) и; F (х, у, г) передаются в программное обеспечение VRinterface, которая строит его в виртуальной сцене 3D видел оператором носить дисплей устанавливаемый на головке (HMD). Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
Туннельный ток, который течет между наконечником и СЗМповерхность измеряется с помощью усилителя трансимпедансного с переменным коэффициентом усиления , который находится в диапазоне от 1 × 10 -3 до 1 × 10 9 В / А (полоса при коэффициента усиления 1 х 10 9 В / А 1 кГц). Выходной сигнал усилителя подается в обратной связи СТМ (FB) петли, чтобы регулировать высоту оголовка над поверхностью в режиме постоянного тока сканирования. Стабильность развязке (с осцилляция ТФС выключенный) составляет 1-3 мкм. Пьезоэлектрический сигнал колебаний ССТ усиливается в два этапа: (1) предварительный усилитель крепится к LN 2 щита (получить 1 х 10 8 В / А, ширина полосы частот 20 кГц), и (2) внешний усилитель напряжения с переменным коэффициентом усиления от 1 х 10 1 до 5 × 10 4 и ширина полосы частот 1 МГц.
Для экспериментов с HCM, установка СЗМ расширена: система захвата движения (MCS), дистанционно управляемый источник напряжения многоканального (РВС), суммирующий усилитель и головки виртуальной реальности установлен дисплей (HMD). Все перечисленные устройства, кроме Summiнг усилителя были приобретены на коммерческой основе.
MSC является инфракрасный (ИК) маркерная система слежения, что позволяет решать миллиметровую пространственных перемещений со скоростью 100 Гц. Система состоит из двух ИК-камер, отслеживаемый объект (TO) и управляющее программное обеспечение. Программное обеспечение MCS получает x-, y-, Z-координаты в 3D-пространстве, анализируя ее изображения, полученные с помощью двух камер. MCS предоставляет библиотеку программирования, которая позволяет использовать координаты в отдельной программе.
Координаты по (х К, у к, г TO) передаются в специально разработанной программе программного обеспечения "TipControl". На рисунке 4 показан снимок экрана графического интерфейса пользователя. Программное обеспечение активируется с помощью кнопки "Пуск" в окне. После активации (τ = 0) программное обеспечение устанавливает все v х -, v у -, v г -voltages на РВС (диапазон напряжения ± 10 В при 16битное разрешение, 50 мс задержка на шаг напряжения) в соответствии со следующим выражением  и т.д., где с х, с у, с г являются факторами , которые преобразовывают 5 см смещения TO в 1 водоизмещением иглы СЗМ. Факторы р х (т), р у (т), р г (т) имеют значения , определенные состояния x-, y-, Z-галочки в окне программы. Если флажок установлен, то соответствующий р (Т) устанавливается равным 1. Все р (Т) установлены на 0 в момент, когда кнопка "пауза" нажата в окне программы. Это позволяет оператору временно "заморозить" положение наконечника. При нажатии на кнопку "Сбросить все" в окне программного обеспечения устанавливает v х -, v у -, v г -voltages к нулю , который возвращает наконечник в исходное положение , заданное программным обеспечением СЗМ. Поле Текст "вручную команда РВС" в окне программного обеспечения CA п быть использован для установки любого из Ф Х -, v у -, v г -voltages на любое значение в допустимом диапазоне ± 10 В. v х -, v у -, v г -voltages порождается RVS добавляются к U х -, у у -, U Z сигналы -output напряжения СЗМ электроники через суммирующего усилителя (усиление 1, полосы пропускания 50 кГц, выходной диапазон ± 10 в).
и т.д., где с х, с у, с г являются факторами , которые преобразовывают 5 см смещения TO в 1 водоизмещением иглы СЗМ. Факторы р х (т), р у (т), р г (т) имеют значения , определенные состояния x-, y-, Z-галочки в окне программы. Если флажок установлен, то соответствующий р (Т) устанавливается равным 1. Все р (Т) установлены на 0 в момент, когда кнопка "пауза" нажата в окне программы. Это позволяет оператору временно "заморозить" положение наконечника. При нажатии на кнопку "Сбросить все" в окне программного обеспечения устанавливает v х -, v у -, v г -voltages к нулю , который возвращает наконечник в исходное положение , заданное программным обеспечением СЗМ. Поле Текст "вручную команда РВС" в окне программного обеспечения CA п быть использован для установки любого из Ф Х -, v у -, v г -voltages на любое значение в допустимом диапазоне ± 10 В. v х -, v у -, v г -voltages порождается RVS добавляются к U х -, у у -, U Z сигналы -output напряжения СЗМ электроники через суммирующего усилителя (усиление 1, полосы пропускания 50 кГц, выходной диапазон ± 10 в).
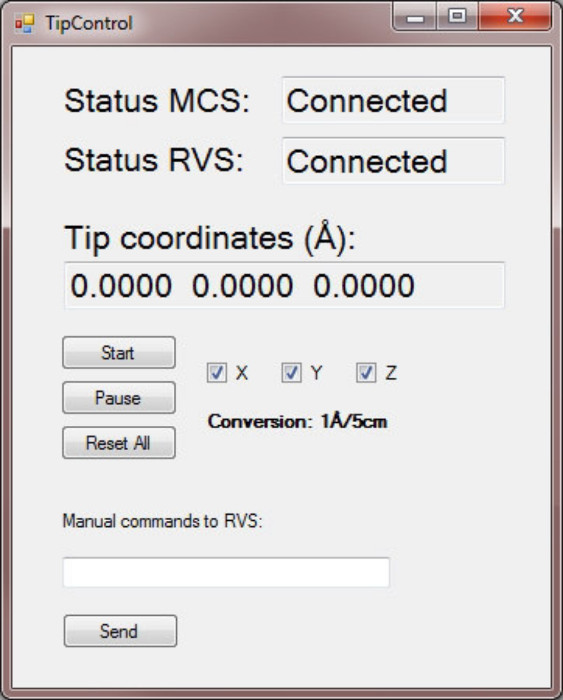
Рисунок 4. Снимок экрана окна интерфейса. Два индикатора демонстрируют состояние связи с системами MCS и РВС. Флажки используются для активации ручной контроль вдоль выбранных пространственных осей. Кнопка "Пуск" инициирует поток данных между MCS, TipControl и РВС в соответствии со схемой , показанной на рисунке 3. Кнопка "Пауза" останавливает поток данных. Кнопка "Reset All" устанавливает все RVS напряжения к нулю.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" целевых = "_blank"> Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
Для визуализации экспериментальных данных (траектории наконечника, I,; F) используется головка монтируется дисплей (HMD). HMD обеспечивает стереоскопическое изображение (сплит HD дисплей – одна половина для каждого глаза, 1,920 х 1,080 пикселей при частоте 75 Гц). Выделенный ИК камера отслеживает положение и ориентацию ГМД в 3D-пространстве с использованием ИК-светодиодов, закрепленных на поверхности ГМД. Система отслеживания HMD позволяет оператору изменить вид внутри виртуальной реальности сцены 3D на повороте их головы или просто перемещая свое тело.
Специально написанная программа "VRinterface" собирает данные как из ФСМ и MCS, делает его в 3D-сцены с использованием OpenGL и отображает его в ГМД с помощью комплекта средств разработки программного обеспечения гексаметилдисилазана (SDK). VRinterface извлекает фактический осей X, Y, Z-координаты наконечника непосредственно изПрограммное обеспечение наконечника (несколько миллисекунд задержки) в то время как сигналы I и ; F считываются непосредственно с выходов СЗМ электроники (задержка ≈ 250 мс). На рисунке 5 показан скриншот виртуальной сцены 3D , как показано оператором во время ношения HMD ГКМ. Внутри 3D виртуальной сцены кончик апекс визуализируется в виде белого шара. Окраска записанных траекторий кончика отражает значения либо лог (I (х, у, г)) или (х; F, Y, Z). Переключение между лога (I (х, у, г)) или; F (х, у, г) цветовых режимов осуществляется нажатием одной кнопки. Другая кнопка инициирует запись (и отображение) экспериментальных данных Кончик траектории. При повторном нажатии кнопки останавливает запись. Виртуальная сцена также показывает статическую молекулу PTCDA, которая используется в качестве визуальной помощи во время манипуляций. Оператор выравнивает свою ориентацию вручную в соответствии с ориентацией реальной молекулы на поверхности с помощью кнопок на клавиатуре.
Внимание: Потому что голова тстеллажной ГМД зависит от ИК-светодиодов, это может помешать ГКС, поскольку он также использует ИК-свет, чтобы отслеживать положение TO. Поэтому должен иметь уникальную форму, признанную MCS. Это помогает MCS различать сигналы, которые поступают из TO и тех, кто прибывает из ИК-светодиодов ГМД.
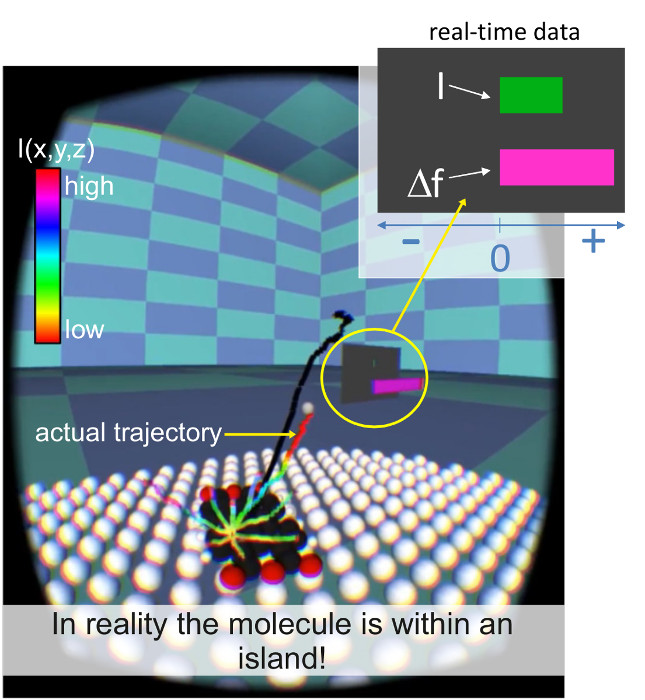
Рисунок 5. S creenshot виртуальной сцены 3D отображается оператору в HMD во время ГКМ. Набор белых шаров образует поверхность модель Ag (111). Ориентация поверхности модели не обязательно должна совпадать с ориентацией образца. Модель молекулы PTCDA находится над поверхностью модели. C, O, атомы Н PTCDA показаны в черный, красный и белый соответственно. Для удобства азимутальной ориентации молекулы модели могут быть скорректированы в соответствии с ориентацией реальной молекулы выбраннойдля манипуляций. Положение наконечника отмечен одной белой сферы, представляющей самый верхний атом кончик зонда. В режиме реального времени I (х, у, г) и; F (, у, х г) данные отображаются в виде штрих-индикаторов, расположенных рядом с наконечником. Ранее записи, а также в настоящее время выполняются манипуляции отображаются в виде 3D-траекторий, цвет которых представляет собой либо журнал (I (х, у, г)) или (x, y, z) значения, измеренные на; F соответствующие позиции траектории. На рисунке показаны траектории, которые окрашены журнал (I (х, у, г)) сигнала. Цветовой контраст может переключаться между лога (I (х, у, г)) и ; F (х, у, г) режимами нажатием кнопки. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
