Results of kidney analysis
Surface area and volume data are acquired from the segmentation of the kidneys. This information can be used to compare experimental and control models or track changes over time. The calipers tool is useful for quickly measuring abnormalities (i.e., cysts, tumors) and how they change in length over time. Figure 3 suggests that both the segmentation and caliper methods can be used to measure cyst volumes accurately. Figure 4 demonstrates a clear difference in total kidney volume (TKV) between age-matched control and experimental (Pkd1RC/RC) mice. 3D visualization of these volume renderings may be performed within the system, including rotations within 3D space (Figure 5). These 3D-reconstructions are then used to calculate TKV (mm3; Figure 4) as well as individual large cyst volume.
Results of cardiac analysis
Many useful parameters are acquired from the analysis of M Mode images. These data provide a good snapshot of the left ventricular (LV) cardiac function at that point in time. The data output includes LV internal diameter, LV posterior wall, LV anterior wall diameter, ejection fraction, fractional shortening, stroke volume, heart rate, cardiac output, LV volume, and LV mass. The success of cardiac analysis is dependent on accurate segmentation of the layers on the M Mode image. Most cardiovascular results are calculated by the peak systolic and diastolic phases of the posterior and anterior endocardial layers. The posterior epicardial layer appears bright white and follows a similar pattern to the posterior endocardial layer. The tracing for the posterior endocardial layer should be placed on the lowest contour. The anterior endocardial layer should be traced along the highest contour of that layer. The anterior epicardial layer appears linear at the bottom of the image due to the prone positioning of the animal (Figure 2D). Figure 6 shows an example of one study with no significant difference in cardiac output between experimental and control mice. As with renal imaging, 3D cardiac visualization is possible. Nevertheless, a 4D visualization of the cardiac cycle (Supplemental Figure 1) allows the investigator to visualize and pinpoint both morphologic and cycle-dynamic abnormalities in the assessed animal.
Morphology assessment
For quick and inexpensive assessment, US can effectively monitor physiological parameters longitudinally. However, many studies wish to additionally determine finer morphologic characteristics, e.g., number and sizes of cysts, calcifications (kidney stones), vascularization, or degree of fibrosis. Figure 7 compares a normal mouse kidney to a cystic mouse kidney to a moderately calcified mouse kidney. By increasing the US center frequency (10 MHz with the linear array) to 35 MHz (wobbler amplifier), pictures of increasing detail may be obtained.
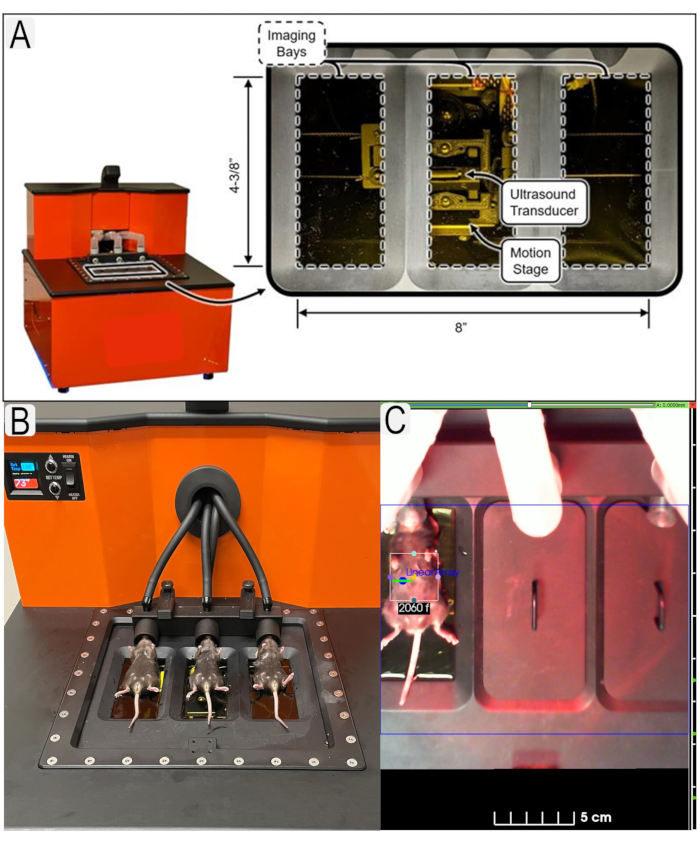
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
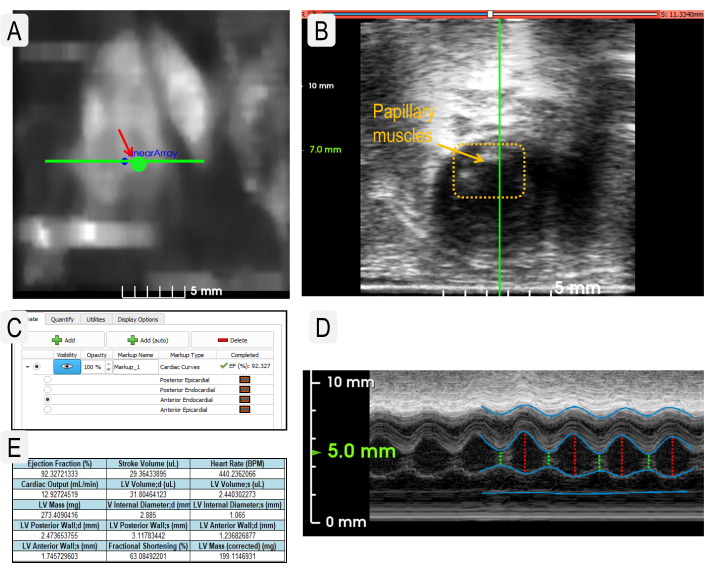
Figure 2: Cardiac ultrasound imaging to obtain physiological parameters. (A) Use of the Heart Finder heatmap image to position the transducer in the left ventricle for M-Mode imaging. The transducer location in the left ventricle is indicated by the large green dot. (B) View of the transducer when placed correctly over papillary muscles (dotted box). (C) Example view of layers needed to measure cardiac parameters. (D) View of live M-Mode image with layers designated as in panel C. (Layers from top to bottom: posterior epicardial, posterior endocardial, anterior endocardial, and anterior epicardial.) (E) Example output of statistics generated from cardiac measurements. Please click here to view a larger version of this figure.
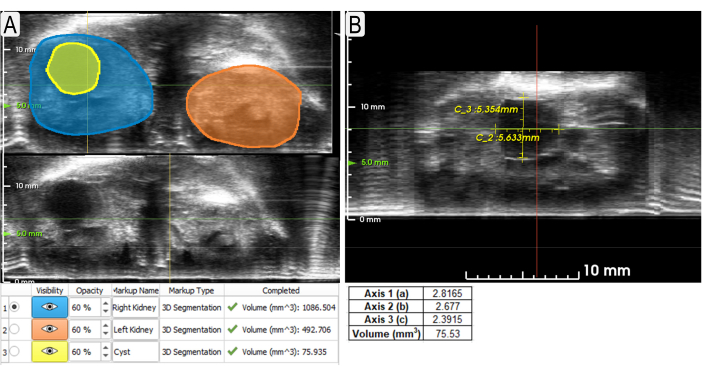
Figure 3: Using segmentation and calipers tools to measure kidneys and cyst. (A) Example segmentations (axial view) of both kidneys (blue and orange shading) and a large cyst (yellow) with volumes listed below. Non-segmented views are shown underneath so that the unobscured US may be viewed. (B) Example use of calipers to measure the same cyst (sagittal view) from Figure 3A with measurements below. The volume was calculated using the formula for an ellipse (volume = (4/3)π x a x b x c, where a, b, c are relative x, y, z, respectively). Please click here to view a larger version of this figure.
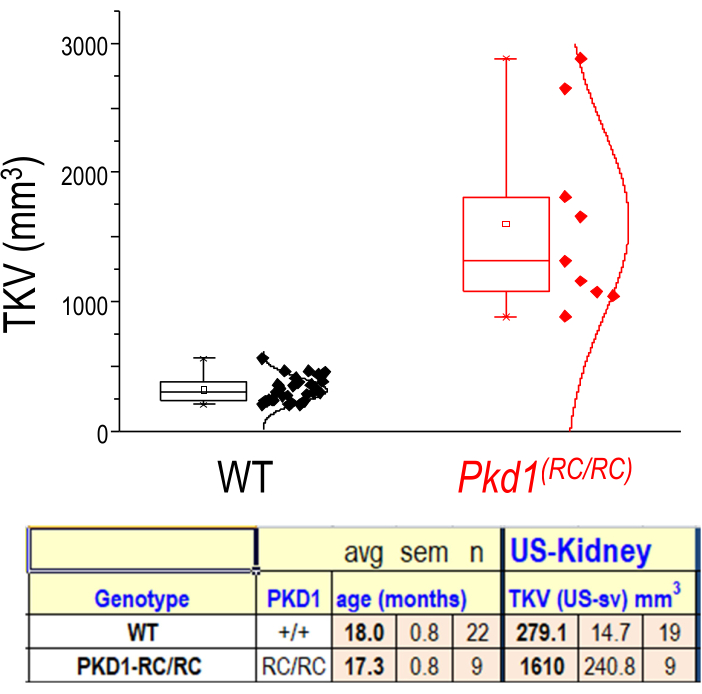
Figure 4: TKV distributions of WT and cystic mouse kidneys. Representation of TKVs for wild-type (WT) (C57BL/6J) and diseased (Pkd1RC/RC) mice. n = 22 (WT) n = 9 (Pkd1RC/RC); Results of two-tailed t-test: p < 0.0001. Box shows 25-75th percentile values and whiskers show 1.5 times interquartile range. Please click here to view a larger version of this figure.
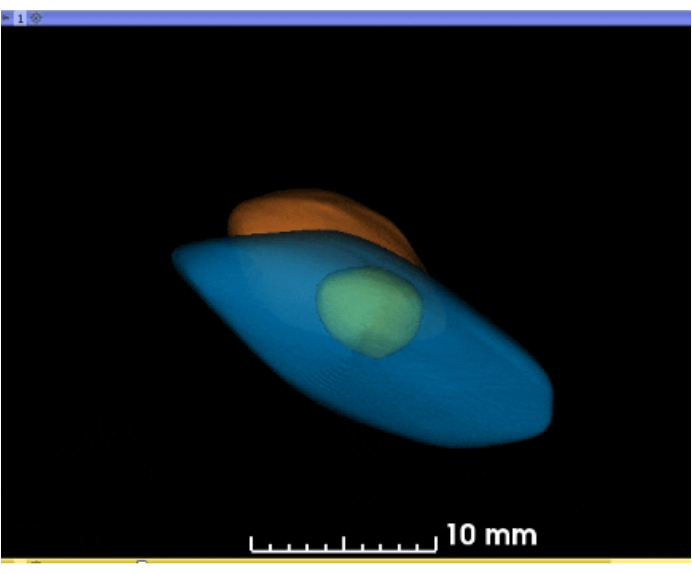
Figure 5: Animated 3D reconstruction of segmented kidneys and cyst. Using the software, the 3D projections of the kidneys and cyst may be rotated or rocked in the 3D space (blue = left kidney; yellow = large cyst; orange = right kidney). Please click here to download this figure.
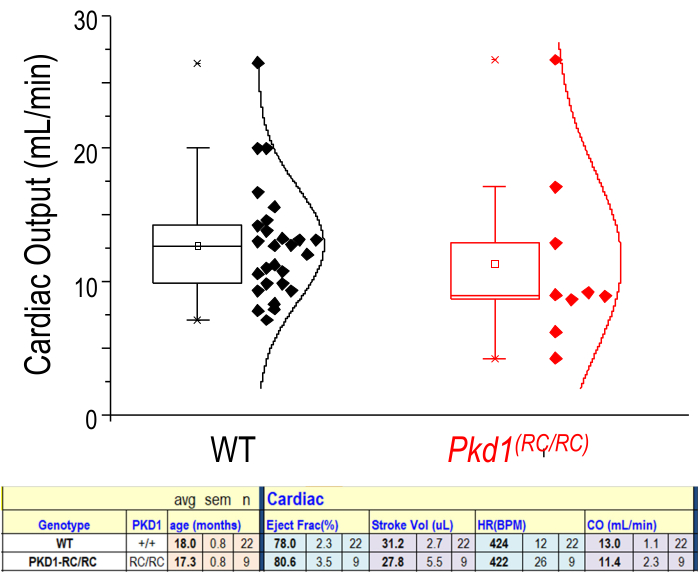
Figure 6: Cardiac physiological parameters from US measurements. Representation of cardiac output (mL/min) for WT and diseased (Pkd1RC/RC) mice. n = 22 (WT) n = 9 (Pkd1RC/RC). The lower tabulated data show that there is no significant difference for these two groups in ejection fraction, stroke volume, heart rate (HR), or cardiac output (CO). Results of two-tailed t-test: p > 0.05. Box shows 25-75th percentile values. Please click here to view a larger version of this figure.
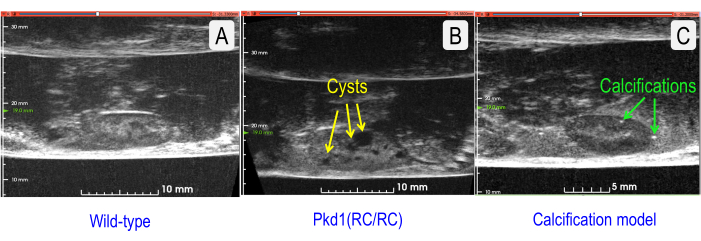
Figure 7: Comparison of US sagittal sections of normal and two pathologies. (A) Wild-type (C57BL/6J strain) kidney (TKV = 143.202 mm3). (B) Cystic kidney with increased TKV (Pkd1RC/RC mouse) (TKV = 333.158 mm3). Cysts are indicated by yellow arrows. (C) Kidney with vascular calcifications (Model = Low-Density Lipoprotein Receptor Deficient, Apolipoprotein B100-only mouse fed a Western diet for 12 months5) (TKV = 127.376 mm3). Renal stones are indicated by green arrows. Please click here to view a larger version of this figure.
Supplemental Figure 1: 4D cardiac cycle movie from US measurements. Using the software, a representation of the beating heart is captured in 3D US and projected through the cardiac cycle. The green arrow indicates the aortic valve. (Model = Low-Density Lipoprotein Receptor Deficient, Apolipoprotein B100-only mouse, fed a Western diet for 12 months5). This model generates vascular calcifications enabling easier visualization of the heart and valves due to the greater acoustic reflectivity of the calcifications in US. Similar 4D reconstructions are possible with WT mice; however, the captured acoustic contrast will not be as high. Please click here to download this File.
