All experimental procedures performed in this study were approved by the Biological Sciences Local Animal Care Committee, in accordance with guidelines established by the University of Toronto Animal Care Committee and the Canadian Council on Animal Care.
1. Implantation of a head bar on top of the skull
NOTE: To avoid the contribution of VOR behavior to the eye movements, the head of the mouse is immobilized during the OKR test. Therefore, a head bar is surgically implanted on top of the skull.
- Anesthetize a mouse (2-5-month-old female and male C57BL/6) by a mixture of 4% isoflurane (v/v) and O2 in a gas chamber. Transfer the mouse to a customized surgery platform and reduce the concentration of isoflurane to 1.5%-2%. Monitor the depth of anesthesia by checking the toe-pinch response and the respiration rate throughout the surgery.
- Place a heating pad underneath the animal's body to maintain its body temperature. Apply a layer of lubricant eye ointment to both eyes to protect them from drying. Cover the eyes with aluminum foil to protect them from light illumination.
- Subcutaneously inject carprofen at a dose of 20 mg/kg to reduce pain. After wetting the fur with chlorhexidine gluconate skin cleaner, shave the fur on top of the skull. Disinfect the exposed scalp with 70% isopropyl alcohol and chlorhexidine alcohol twice.
- Inject bupivacaine (8 mg/kg) subcutaneously at the site of incision, then remove the scalp (~1 cm2) with scissors to expose the dorsal surface of the skull, including the posterior frontal bone, parietal bone, and interparietal bone.
- Apply several drops of 1% lidocaine and 1:100,000 epinephrine on the exposed skull to reduce local pain and bleeding. Scrape the skull with a Meyhoefer curette to remove the fascia and clean it with phosphate-buffered saline (PBS).
NOTE: The temporalis muscle is separated from the skull to increase the surface area for a head bar to attach. - Dry the skull by gently blowing compressed air toward the skull surface until the moisture is gone and the bone turns whitish. Apply a thin layer of superglue on the exposed surface of the skull, including the edge of the cut scalp, followed by a layer of acrylic resin.
NOTE: The surface of the skull needs to be free of blood or water before the application of superglue. - Place a stainless-steel head bar (see Figure 1A) along the midline on top of the skull. Apply more acrylic resin, starting from the edge of the head bar until the base of the head bar is completely embedded in the acrylic resin. Apply acrylic resin two or three times to build up the thickness.
- Wait for about 15 min until the acrylic resin hardens. Subcutaneously inject 1 mL of lactated ringer's solution. Then, return the mouse to a cage placed on a heating pad until the animal is fully mobile.
- Allow the mouse to recover in the home cage for at least 5 days after surgery. Once the animal is in good shape, fix its head with the head bar in the OKR setup for 15-30 min to familiarize it with the head fixation and the experimental environment. Repeat the familiarization once a day for at least 3 days.
2. Setup of the virtual drum and video-oculography
- Mount three monitors orthogonally to each other to form a square enclosure that covers ~270° of the azimuth and 63° of the elevation in the visual space (Figure 1B left).
- With a discrete graphic card, merge the three monitors into a simple display to ensure synchronization across all the monitors.
- Calibrate the luminance of monitors as described below.
- Turn on the computer to which the monitors are connected and wait for 15 min. The warm-up is essential to have stable luminance.
- Systematically change the brightness setting on the monitor from 0 to 100 by steps of 25.
- For each brightness value, measure the luminance of the monitors under various pixel values (0-255, steps of 15) with a luminance meter.
- Fit the relationship between luminance and brightness for pixel value 255 with linear regression and estimate the brightness value that gives rise to 160 cd/m2.
- For each pixel value used in the luminance measurement (step 2.3.3), estimate the luminance for the brightness value derived in step 2.3.4 based on linear regression. Use the power function lum = A * pixelγ to fit the relationship between the new set of luminance values (under the brightness value derived in 2.3.4) and their corresponding pixel values to derive the gamma factor γ and the coefficient A. These will be used to generate sinusoidal gratings of desired luminance values.
- Set the brightness of all three monitors to the values derived in step 2.3.4 to ensure their luminance values are the same for the same pixel value.
- Generate a virtual drum, which is used to stimulate OKR behavior, with the visual stimulation toolkit, as described below.
- Present a vertical sinusoidal grating on the monitors and adjust the period (spacing between stripes) along the azimuth to ensure the projection of the grating on the eye has constant spatial frequency (drum grating; Figure 1B middle and right).
- Ensure the animal head-fixed at the center of the enclosure so that it sees the grating has a constant spatial frequency across the surface of the virtual drum.
- Modify the parameters of moving grating, such as the oscillatory amplitude, spatial frequency, temporal/oscillation frequency, direction, contrast, etc., in the visual stimulation codes. Use two types of visual motion: (1) the grating drifts clockwise or counterclockwise in an oscillatory manner following a sinusoidal function:

Here, Amp is the amplitude of drum trajectory, f is the oscillation frequency, and t is the time (oscillation amplitude: 5°; grating spatial frequency: 0.04-0.45 cpd; oscillation frequency: 0.1-0.8 Hz, corresponding to a peak velocity of the stimulus of 3.14-25.12 °/s [drum velocity = Amp x 2π x f x cos (2π x f x t); contrast: 80%-100%; mean luminance: 35-45 cd/m2; (2) the grating drifts unidirectionally at a constant velocity:

(Spatial frequency: 0.04-0.64 cpd; temporal frequency: 0.25-1 Hz; drum velocity = temporal frequency/spatial frequency.)
- Set up the video-oculography as described below.
- To avoid blockage of animal's visual field, place an infrared (IR) mirror 60° from the midline to form an image of the right eye.
- Place an IR camera on the right side behind the mouse (Figure 1C left) to capture an image of the right eye.
- Mount the high-speed IR camera on a camera arm that allows the camera to rotate by ± 10° around the image of the right eye (Figure 1C right).
- Use a photodiode attached to one of the monitors to provide an electrical signal to synchronize the timing of video-oculography and visual stimulation.
- Place four IR light emitting diodes (LEDs) supported by gooseneck arms around the right eye to provide IR illumination of the eye.
- Place two IR LEDs on the camera to provide corneal reflection (CR) references: one is fixed above the camera (X-CR), while the other is on the left side of the camera (Y-CR; Figure 1D).
- Measure the optical magnification of the video-oculography system with a calibration slide.
NOTE: The reference CRs are used to cancel out the translational eye movements when the eye angle is calculated based on the rotational eye movements.
- Fix the animal's head at the center of the enclosure formed by the monitors, as described below.
- Fix the animal's head with the head plate to the center of the rig and make it face forward. Adjust the tilt of the head so that the left and right eyes are leveled, and the nasal and temporal corners of the eyes are aligned horizontally (Figure 1E).
- Move the animal's head horizontally by coarse adjustment provided by the head-fixation apparatus and fine adjustment provided by a 2D translational stage, and vertically through the head-fixation apparatus and a post/post holder pair, until the animal's right eye appears in the live video of the camera. Before the calibration and measurement of eye movements, overlay the image of the animal's right eye reflected by the hot mirror with the pivot point of the camera arm (see details in step 3.4 below).
- Build a customized enclosure around the OKR rig to block room light (Figure 1F).
3. Calibration of eye movements
NOTE: Rotational eye movements are calculated based on movements of the pupil and the radius of the orbit of the pupillary movements (Rp, the distance from the center of the pupil to the center of the eyeball). For each individual mouse, this radius is measured experimentally21.
- Fix the animal's head at the center of the enclosure formed by the three monitors, as described in step 2.6.1.
- Turn the camera on and adjust the four LEDs surrounding the right eye to achieve uniform IR illumination.
- Under visual guidance, adjust the position of the right eye until it appears at the center of the video, as described in step 2.6.2.
- Align the virtual image of the right eye with the pivot point of the camera arm, as described below.
- Manually rotate the camera arm to the left extreme end (-10°). Manually move the animal's right eye position on the horizontal plane perpendicular to the optical axis with fine adjustment of the 2D translational stage (Figure 1C, green arrow), until the X-CR is at the horizontal center of the image.
- Manually rotate the camera arm to the other end (+10°). If the X-CR runs away from the center of the image, move the right eye along the optical axis with fine adjustment until the X-CR comes to the center (Figure 1C, blue arrow).
- Repeat steps 3.4.1-3.4.2 a few times until the X-CR stays at the center when the camera arm swings leftward and rightward. If the right eye moves in the middle of one repetition, restart the adjustment process.
- Measure the vertical distance between the Y-CR and X-CR after locking the camera arm at the central position. Turn the Y-CR LED on and record its position on the video, and then switch to the X-CR LED and record its position.
NOTE: The vertical distance between the Y-CR and X-CR will be used to derive the position of the Y-CR during the measurement of eye movements in which only the X-CR LED is turned on. - Measure the radius of pupil rotation Rp, as described below.
- Rotate the camera arm to the left end (-10°) and record the positions of the pupil (Pp1) and X-CR (PCR1) on the video.
- Then, rotate the camera arm to the right end (+10°) and record the positions of the pupil (Pp2) and X-CR (PCR2) on the video. Repeat this step multiple times.
NOTE: The animal's right eye needs to remain stationary during each repetition so that the amount of pupil movements in the movie accurately reflects the degree of swinging the camera arm. - Based on the values recorded above, calculate the radius of pupil rotation Rp (Figure 2A) with the following formula:

NOTE: The distance between the corneal reflection and pupil center in the physical space is calculated based on their distance in the movie:
PCR – Pp = number of pixels in the movie x pixel size of camera chip x magnification
- Develop the relationship between Rp and pupil diameter, as described below. Rp changes when the pupil dilates or constricts; proximately, its value is inversely proportional to the pupil size (Figure 2B top).
- Change the luminance of the monitors systematically from 0 to 160 cd/m2 to regulate the pupil size.
- For each luminance value, repeat step 3.6 8-10 times and record the diameter of the pupil.
- Apply linear regression to the relationship between Rp and pupil diameter based on the values measured above to derive the slope and intercept (Figure 2B bottom).
NOTE: The outliers caused by occasional eye movements are removed before the linear fitting. For repetitive measurements in multiple sessions, the calibration needs to be done only once for one animal, unless its eye grows bigger during the experiment.
4. Record eye movements of the OKR
- Head-fix a mouse in the rig following steps 3.1-3.4. Skip this step if the recording occurs right after the calibration is done. Lock the camera arm at the central position.
- Set up the monitors and the animal for scotopic OKR as described below. Skip this step for photopic OKR.
- Cover the screen of each monitor with a customized filter, which is made of five layers of 1.2 neutral density (ND) film. Make sure no light leaks out through the gap between the filter and the monitor.
- Turn the room light off. The following steps are done with the aid of an IR goggle.
- Apply one drop of pilocarpine solution (2% in saline) to the right eye and wait 15 min. Ensure the drop stays on the eye and is not wiped away by the mouse. If the solution is wiped away by the animal, apply another drop of pilocarpine solution. This shrinks the pupil to a proper size for eye tracking under the scotopic condition.
NOTE: Under the scotopic condition, the pupil dilates substantially so that its edge is partially hidden behind the eyelid. This affects the precision of estimating the pupil center by video-oculography. Pharmacologically shrinking the pupil of the right eye diminishes its visual input, and thus the visual stimuli are presented to the left eye. - Rinse the right eye with saline to thoroughly wash away the pilocarpine solution. Pull down the curtain to completely seal the enclosure, which prevents stray light from interfering with the scotopic vision.
- Give the animal 5 min to fully accommodate to the scotopic environment before starting the OKR test.
- Run the visual stimulation software and the eye tracking software. For photopic OKR measurement, ensure the drum grating oscillates horizontally with a sinusoidal trajectory; for scotopic OKR measurement, ensure the drum grating drifts at a constant velocity from left to right, which is the temporo-nasal direction in reference to the left eye.
NOTE: When the pupil of the right eye, but not of the left eye, is shrunk by pilocarpine under the scotopic condition, the OKR elicited by oscillatory drum stimulation is highly asymmetric. Thus, for scotopic OKR measurement, the left eye is stimulated while the movement of the right eye is monitored. - The eye tracking software automatically measures the pupil size, CR position, and pupil position for each frame, and computes the angle of eye position based on the following formula (Figure 2C):
Here, PCR is the CR position, Pp is the pupil position, and Rp is the radius of pupil rotation. The distance between corneal reflection and pupil center in the physical space is calculated based on their distance in the movie:
PCR – Pp = number of pixels in the movie x pixel size of camera chip x magnification
Rp of the corresponding pupil size is derived based on the linear regression model in step 3.7.3 (Figure 2B bottom).
5. Analysis of eye movements of the OKR with the eye analysis software
- Process the eye traces using a median filter (filter window = 0.05 s) to remove high frequency noise (Figure 3A middle).
- Remove the saccades or nystagmus as described below.
- Estimate the eye velocity by calculating the first order derivative of eye movements (Figure 3A bottom). Identify the saccades or nystagmus by applying a velocity threshold of 50 °/s (Figure 3A bottom).
- Replace the saccades or nystagmus by extrapolating the eye positions during these fast eye movements from the segment before the saccades or nystagmus based on linear regression (Figure 3B).
- Compute the amplitude of OKR eye movements by fast Fourier transform (Goertzel algorithm) if the drum grating oscillates (Figure 3C), or compute the average velocity of eye movements during the visual stimulation if the drum grating moves at a constant velocity in one direction (Figure 3B bottom).
NOTE: The amplitude of oscillatory eye movements derived from Fourier transform is similar to the amplitude derived from the fitting of the eye trajectory with a sinusoidal function (Figure 3D). - Calculate the OKR gain. For oscillatory drum motion, OKR gain is defined as the ratio of the amplitude of eye movements to the amplitude of drum movements (Figure 3C right). For unidirectional drum motion, OKR gain is defined as the ratio of eye velocity to drum grating velocity (Figure 3B bottom).
With the procedure detailed above, we evaluated the dependence of the OKR on several visual features. The example traces shown here were derived using the analysis codes provided in Supplementary Coding File 1, and the example traces raw file can be found in Supplementary Coding File 2. When the drum grating drifted in a sinusoidal trajectory (0.4 Hz), the animal's eye automatically followed the movement of the grating in a similar oscillatory manner (Figure 3B top panel), which is characteristic of the OKR behavior2,5,8. The amplitude of OKR eye movements in the horizontal axis was derived with fast Fourier transform (Figure 3C&D), and the OKR gain was calculated as the ratio of the amplitude of eye movements to the amplitude of grating movement (Figure 3C). The OKR gain varied with the values of spatial frequency, oscillation frequency, and the direction of movement grating (Figure 4A). First, the spatial frequency tuning curve of the OKR behavior had an inverted V-shape and peaked at an intermediate spatial frequency of 0.16 cpd (Figure 4A left). Second, the oscillation frequency tuning curve monotonically declined as the oscillation frequency of the drum grating increased (Figure 4A middle), indicating that the OKR behavior works best in response to the low-speed visual motion4. Both the amplitude and shape of the oscillation frequency tuning curve varied when presenting gratings of different spatial frequencies17. Third, the horizontal OKR could also be induced by gratings moving in different directions (Figure 4A right). The strongest horizontal OKR behavior was elicited by the temporo-nasal motion (0°). The OKR gain dropped to ~80%, or ~30% of the maximum, when the grating moved in oblique angles 30° or 60° deviated from the temporo-nasal direction (both upward and downward), respectively, and the horizontal OKR disappeared when the grating moved vertically upward or downward (90° and 270°). Moreover, the shapes of the tuning curves were influenced by the level of luminance. For example, animals performed the OKR behavior well in response to spatial frequencies of 0.16 and 0.32 cpd under the photopic condition, but the spatial frequency tuning curve shifted leftward under the scotopic condition (Figure 4B). To analyze the shape of tuning curves, we fit them with appropriate mathematical functions. For example, the Gaussian function was used to estimate the peak and bandwidth of spatial frequency tuning (Figure 4C). With this analysis, we found that the tuning curve under the scotopic condition had a lower value in the preferred spatial frequency in comparison to the photopic condition. The procedure detailed above can also be used to quantify the plasticity of OKR behavior. Following 45 min of continuous OKR stimulation, the amplitude of the OKR behavior was significantly potentiated (Figure 4D), consistent with previous reports. These results demonstrate the applications of this protocol in examining the oculomotor behaviors and potentials in understanding the brain circuits involved in these behaviors.
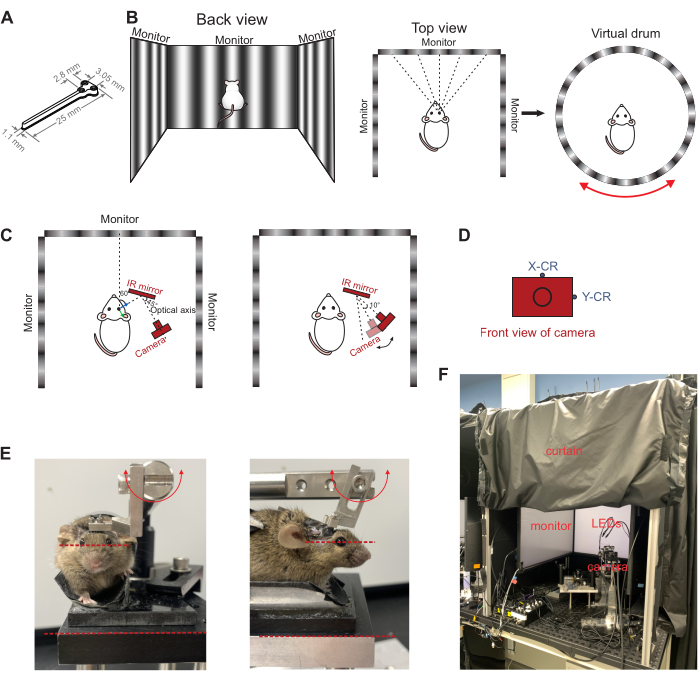
Figure 1: Setup of the OKR rig. (A) Dimensions of the head bar. (B) Back view (left) and top view (middle) of the virtual drum system. Three monitors are mounted orthogonally to each other. The head of a mouse is placed at the center of the square enclosure and faces forward. The period of visual stimulation (space between stripes) is varied based on the azimuth to the animal's eye to ensure the projection of the grating on the eye has a constant spatial frequency. In other words, the spatial frequency of the grating is perceived as constant throughout the visual field, as if the grating drifts along the surface of a virtual drum (right). (C) Setup of IR video-oculography. Left: the position of the camera when fixed at the center during OKR recording. Blue arrow: along the optical axis. Green arrow: perpendicular to the optical axis. Right: the rotation of the camera during eye calibration. (D) Position of the X-CR and Y-CR LEDs fixed on the camera. (E) Levels of the left and right eyes (left), and the nasal and temporal corners of the eyes are aligned horizontally (right) by rotating the horizontal rod or the headplate adapter, respectively (red arrows). (F) Photo of the OKR station. Note that the OKR rig is placed inside a customized enclosure with a black curtain. Abbreviations: IR = infrared; CR = corneal reflection. Please click here to view a larger version of this figure.
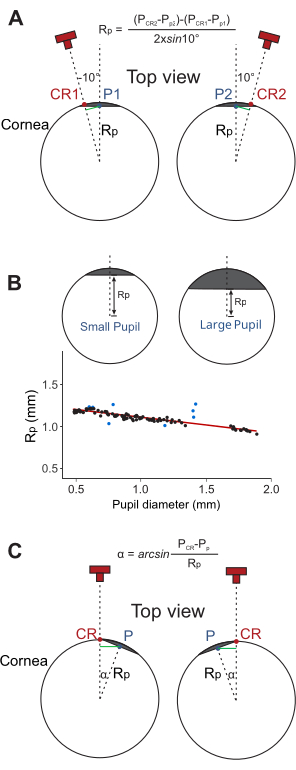
Figure 2: Calibration and measurement of eye positions in video-oculography. (A) Schematic of the calibration. The radius of pupil rotation (Rp) is estimated by rotating the camera to the leftmost position (-10°, left panel) and to the rightmost position (10°, right panel). Red dots indicate the positions of corneal reflection X-CR when the camera is placed to the leftmost and rightmost positions. Blue dots indicate the centers of the pupils. Green bars indicate the distances between the corneal reflection and pupil center viewed in the camera video (PCR – PP). (B) Dependence of Rp on pupil size. Top: schematics of eyeballs with a small or large pupil. Bottom: relationship between Rp and the diameter of the pupil of an example mouse. The pupil size is changed by varying the luminance (10 values in the range of 0-160 cd/m2) to the mouse. Black dots: the data that are used for linear fitting. Blue dots: outliers that are excluded from linear fitting. Red curve: the best-fit line in linear regression. Note that the Rp is inversely proportional to the pupil diameter. (C) Calculation of the angle of eye position when the eye has moved to the right or left sides of the optic axis. Red dots, blue dots, and green bars have the same meanings as in A. Please click here to view a larger version of this figure.
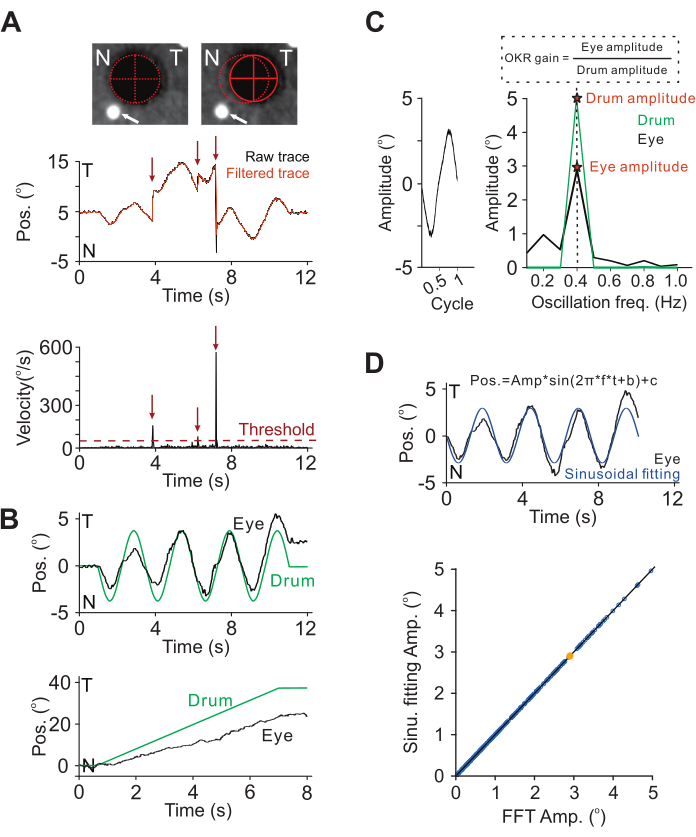
Figure 3: Calculation of OKR gain. (A) Top: snapshots of nasal (N; left) and temporal (T; right) eye positions taken during OKR stimulation. Red ellipses: fitting to pupil profile. Red crosses: pupil centers. White arrows: corneal reflection of a reference LED. Middle: the trajectories of eye movements with (black) or without (red) a median filter (filter window = 0.05 s) to remove high-frequency noise. Bottom: estimation of the eye velocity by calculating the first order derivative of eye movements. Saccades (red arrows) are detected with a velocity threshold of 50 °/s. (B) The trajectory of slow eye movements of the OKR after removing the saccades/nystagmus (black) overlaid with drum trajectory22. Top: oscillatory drum motion with an amplitude of 5° and an oscillation frequency of 0.4 Hz. Bottom: unidirectional (temporo-nasal) drum motion with a constant velocity of 6.25 °/s. (C) Left: the cycle-average of the eye trajectory in B top. Right: the frequency analysis of the eye or drum grating movements by fast Fourier transform. It should be noted that the drum grating oscillates at 0.4 Hz, and thus the amplitudes of eye and drum grating movement peak at 0.4 Hz (star marks). OKR gain is the ratio of the amplitudes of eye and drum grating movement at 0.4 Hz. (D) Top: curve fitting of the eye trajectory in B top with sinusoidal function. Bottom: relationship of the amplitude of eye movements derived by the fast Fourier transform method and derived from sinusoidal curve fitting. Yellow dot: example in the top. Please click here to view a larger version of this figure.
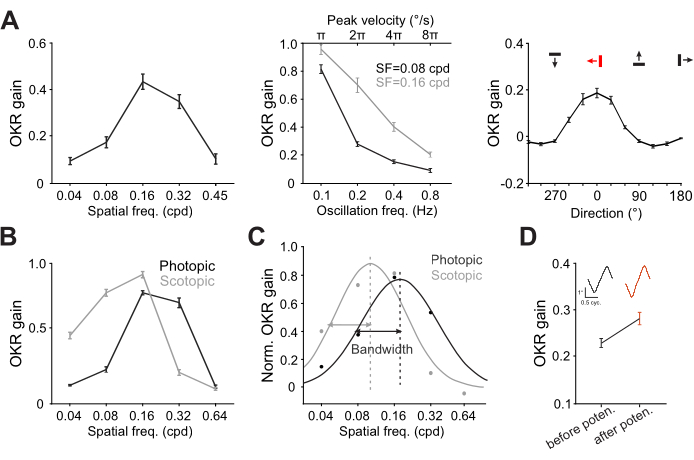
Figure 4: The visual feature selectivity and plasticity of OKR behaviors. (A) The visual feature selectivity of OKR gain under the photopic condition. Left: spatial frequency tuning curve from one animal (oscillation frequency: 0.4 Hz; trajectory: oscillating horizontally; mean luminance: 40 cd/m2; n = 15). Middle: oscillation frequency tuning curve from one animal (spatial frequency: 0.08 or 0.16 cpd; trajectory: oscillating horizontally; mean luminance: 40 cd/m2; n = 15). Right: direction tuning curve from one animal (spatial frequency: 0.16 cpd; temporal frequency: 1 Hz; mean luminance: 45 cd/m2; n = 24). The red arrow and bar indicate the temporo-nasal direction. For spatial and temporal/oscillation frequency tuning, a vertical drum grating presented on three monitors moves horizontally at a constant velocity or in an oscillatory manner. For direction tuning, a grating presented on only the right monitor moves in one of 12 directions at a constant velocity. Thickness: standard error of the mean (SEM). (B) Spatial frequency tuning curve of OKR gain from one animal under the scotopic or photopic condition. Photopic: oscillatory motion; oscillation frequency: 0.2 Hz; mean luminance: 40 cd/m2; n = 15. Scotopic: linear motion with a constant velocity; temporal frequency: 0.25 Hz; mean luminance: 8 x 10-5 cd/m2; n = 16. The scotopic condition is achieved by covering the monitors with five layers of Lee filter (299 1.2 ND). Thickness: SEM. (C) Gaussian fitting of spatial frequency tuning of OKR gain under photopic and scotopic conditions. Photopic: oscillatory motion; oscillation frequency: 0.2 Hz; mean luminance: 40 cd/m2; n = 15. Scotopic: linear motion with a constant velocity; temporal frequency: 0.25 Hz; mean luminance: 8 x 10-5 cd/m2; n = 16. (D) OKR potentiation of one mouse induced by 45 min of continuous OKR stimulation. Spatial frequency: 0.1 cpd; oscillation frequency: 0.4 Hz; mean luminance: 35 cd/m2; n = 40. Top: cycle averaged OKR trajectories before and after OKR potentiation. Thickness: SEM. Please click here to view a larger version of this figure.
Supplementary Coding File 1: Analysis code used for generating the example traces. Please click here to download this File.
Supplementary Coding File 2: Example traces generated with the software. Please click here to download this File.
