1. Outside the scanner room
- Place the rolling table with the free end supported and the exterior end of the long handle detached.
- Check that the robot is switched off.
- Place the robot in the table socket and secure the aluminum safety plate over the robot with 2 screws.
- Attach the end effecter to the robot handle with the aluminum adapter and check that it moves freely.
- Attach the 10′ parallel cable with aluminum shielding to the robot and check that the shielding is intact. Add extra foil if needed.
- Place the aluminum shielding box over the robot being careful to place the parallel and power cables into the groove on the back.
- Carefully screw on the shielding box.
- Pack aluminum foil into the cable groove on the shielding box and be sure the foil makes contact with the shielding on the parallel cable.
2. Moving into the scanner room with two people, A and B
- Prepare to enter a high magnetic field environment by removing any and all metallic objects including non-ferrous ones, e.g., cell phones, keys, coins, etc…
- With person A holding the free end of the robot table and person B stabilizing the box end, roll it free end first until the robot just enters the door of the room.
- Person B clips the security rope tethered to an anchor hole on the back of the shielding case and checks that the other end is firmly attached to a wall anchor.
- Working together, roll the table into the room and attach it with Velcro straps to the foot of the fMRI table. The robot end of the table must stay as far from the scanner as possible.
- Attach the robot’s parallel cable to the custom filter on the pass through to the control room, and plug in the robot. The shielding foil on the parallel cable should make contact with the filter.
- Attach the exterior part of the long handle (end effecter) and verify that it will enter the bore of the fMRI cleanly.
3. In the control room
- Start the control computer and attach the 6′ parallel cable to the robot. Be sure to remove any extra filters that may be on the interior part of the pass through.
- Verify that the robot motors are turned off, start up the Phantom calibration routine and verify that the position readouts of the motors from the robot’s calibration routine are stable.
- Double check the parallel cable connection and that only the large custom filter is attached if the calibration routine cannot see the robot or there are large variations in the motor readout.
- Turn on the robot by opening the port on the back of the shielding box and press the switches with a stick.
- Restart the calibration routine with the end effecter approximately centered at the end of the conical waveguide. Step through the calibration and check that the box calibration box has the appropriate haptic interaction.
- Attach the TTL output from the fMRI (BNC connector) to the Labjack ADC on the control computer.
4. The subject
- Prepare the subject for a high magnetic field environment with the standard fMRI protocols.
- Set up any extra equipment for the experiment, e.g., visual display system. We use the NordicNeuro Lab, Inc. Vision System which provides stereo viewing of visual displays, a feature that is particularly helpful when presenting virtual environments.
- After the subject lies down on the table and the head coil is situated, adjust the distance of the robot by loosening the hand screws and sliding the top of the table until the subject can move comfortably.
- Guide the table manually by holding onto the robot end while the fMRI table is moving in and out of the bore to prevent the casters from wobbling. Make sure the end effecter goes into the bore and does not catch on the outside.
- Run the experiment.
5. Break down the setup with two people A and B
- After the patient exits, remove the exterior end of the long handle and detach the robot table from the fMRI table by undoing the Velcro strap.
- From the robot, undo the shielded parallel cable and unplug the power cable.
- With person A holding the free end of the robot table and person B guiding the robot end, move the table to the door. At the door, undo the tether, and roll the robot table out to the hall.
- Undo all the screws from the shielding box and the two screws from the safety plate and remove the robot.
6. Representative results:
Ideally, the haptic robot and fMRI should not affect each other. We can tell online if the robot is being affected by the fMRI. Generally, if the robot’s parallel cable is not properly shielded and filtered, then the readout of the motors will oscillate rapidly. This can be fixed by double checking the aluminum shielding on the cable, that the ferrous core is properly placed on the parallel cable near the robot, and that the only filter to the robot is the custom filter on the scanner room side of the pass through. Detecting errors in the fMRI is really only possible after the data have been reduced and analyzed, but an anatomical scan should be taken early in the study and checked for zipper effects or other artifacts indicative of correlated noise (e.g. spike noise) 7. Frequently, such noise comes from metal on metal contact and can be cleaned up by tightening all the screws on the robot table, especially the hand adjustment screws on the side of the table. From our tests the baseline fMRI signal to noise ratio (SNR) is ˜380 and with the robot fully shielded in the room that drops to a still reasonable ˜330. If the shield is not in place on the robot, then the SNR drop further to ˜250, and noise effects become very significant.
As shown in 4, the 3 degree of freedom joint in the center of the handle has little effect on the dynamics of the robot/hand interaction except to shift it away from the robot. The joint in the center of the handle acts like a fulcrum and reverses the apparent motion in two of the directions (left-right and up-down) but not the third (forward-back). Since the Phantom and the hand are at opposite ends of the lever like handle with its fulcrum in the middle, gains are applied in software in each of the three Euclidean directions: negative gains in the two directions controlled by the swivel joint and a positive gain in the direction of the slider joint. The net effect of the handle and swivel reproduces the full 3 degrees of freedom of the Phantom robot, just 9′ away.
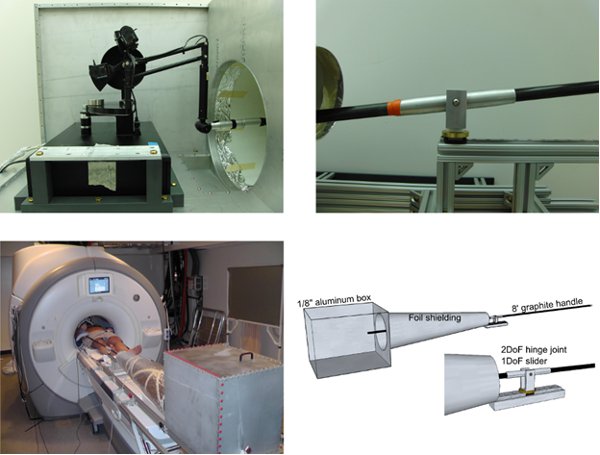
Figure 1 The apparatus used to mount the haptic robot for use in the fMRI environment. Top shows the haptic robot mounted in the case prior to enclosure (top, left) and the gimbal/slider joint at the midpoint of the handle (top, right). Bottom, left shows a subject in the scanner manipulating the handle. Bottom, right is a cartoon of the shielding and end effecter.
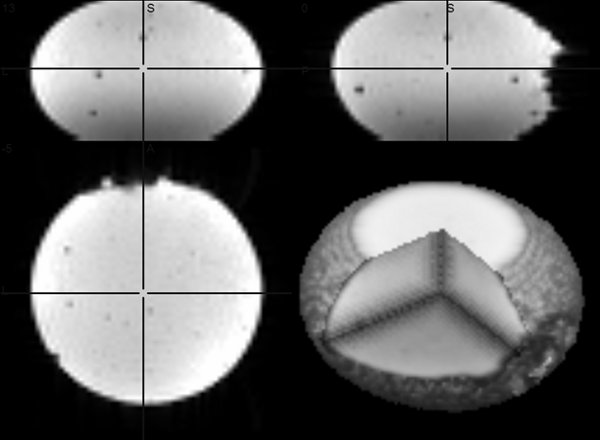
Figure 2 Results of the BIRN test for the fully shielded robot with movement. The three images with crosses show sections of the spherical head model, and the bottom right shows a three dimensional view. The small dots are bubbles in the static head model and are always present. The lack of large stripes or zippers indicates that the noise from the robot is uncorrelated.
