Figure 4 plots example results obtained from such an experiment. The y-axis in each figure describes the proportion of times that the test pattern was chosen as having a greater RID. Rather than plotting the absolute number of times this occurred, this is given as a proportion. The x-axis describes the physical RID of the test pattern; remembering that here, the reference pattern was held at a constant 45° RID. The data points represent the proportion of times that the observer chose the test curve as having the greater RID for a range of physical RIDs. The computer only scores the number of times that the test pattern is chosen as having a greater RID; this means that data for an "ideal" observer should range between zero: never chose the test as greater in RID when it had a smaller RID than the reference; and one: always chose the test as greater in RID when it had a larger RID than the reference.
From this plotted data we can determine an observer’s sensitivity to changes in RID. To do this we fit the data to a Cumulative Gaussian function using a statistical package (see Materials). The fit enables us to estimate the precision, or sensitivity of an observer’s judgment of RID. In the figure, it is clear from the steepness of the solid lines in each plot that observers are highly sensitive to a change in RID angle. This means that observers are highly sensitive to a RID manipulation of a planar object; here a curved contour. However, in our paradigm we have also chosen to compare performance in two conditions: stereo and nonstereo. Since the data representing these two conditions physically overlaps, it appears that on this task there is no difference in precision between stereo and nonstereo conditions. An additional statistical comparison of precision estimates can be performed in order to determine whether or not the data statistically differ.
Movie 1. Demonstrates the change in the two dimensional (2D) retinal image of a shape that is being subject to a rotation-in-depth (RID) around vertical. Here the viewer can see that the main change to the image of a shape that has RID is a horizontal compression of its shape.
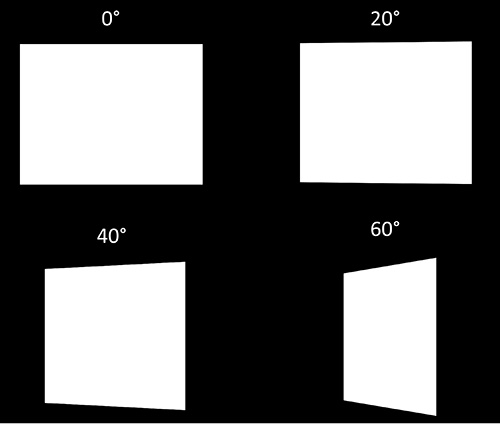
Figure 1. Static illustration of how the retinal image of a sheet of paper is altered as the paper is RID. Here the viewer can also appreciate the perspective projection method that we apply. That is, as the paper is increasingly RID the reader can see that the far (left) edge of the paper is being more compressed in vertical size than the near edge. This asymmetry in the size of each edge occurs because near objects produce larger retinal images while far objects produce smaller retinal images. Perspective projections, which we have used, incorporate this asymmetry while orthographic projections ignore this effect. The title above each image shows its angle of RID. Click here to view larger image.
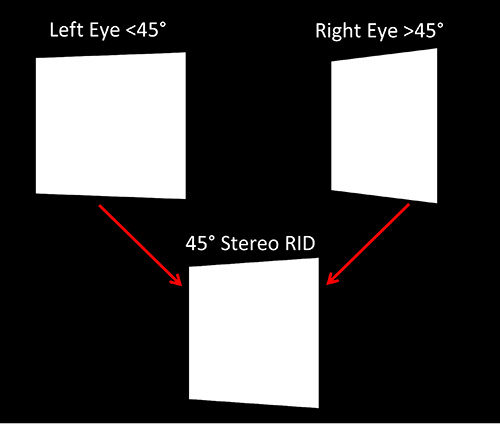
Figure 2. Using binocular disparity to present in 3D. If two matched images at slightly different RID angles are presented separately to the left and right eye, a stereo (3D) RID can be perceived. For example, to achieve the percept of a sheet of paper that is RID 45° in 3D (left edge receding) the image projected to the left eye should be one at an angle less than 45° while that projected to the right eye should be at an angle greater than 45°. Click here to view larger image.
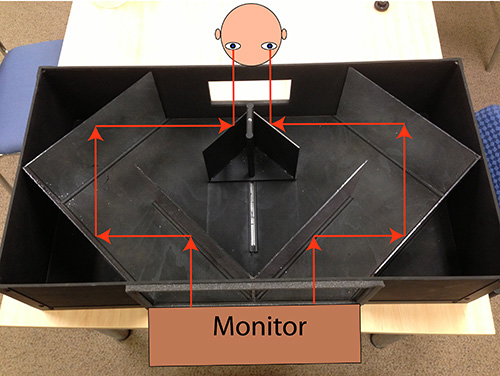
Figure 3. A top down view of our adapted Wheatstone eight mirror stereoscope, with top cover removed. The red lines and arrows depict the separate paths of light from the monitor to each eye. This mirror stereoscope incorporates 8 first surface mirrors; four along the path to each eye. Using a series of mirrors in this way allows for a viewing distance of approximately 1 m from the screen to the observer: a comfortable viewing distance. All nonmirrored surfaces have been painted in matte black to avoid shadow and reflectance issues. Click here to view larger image.
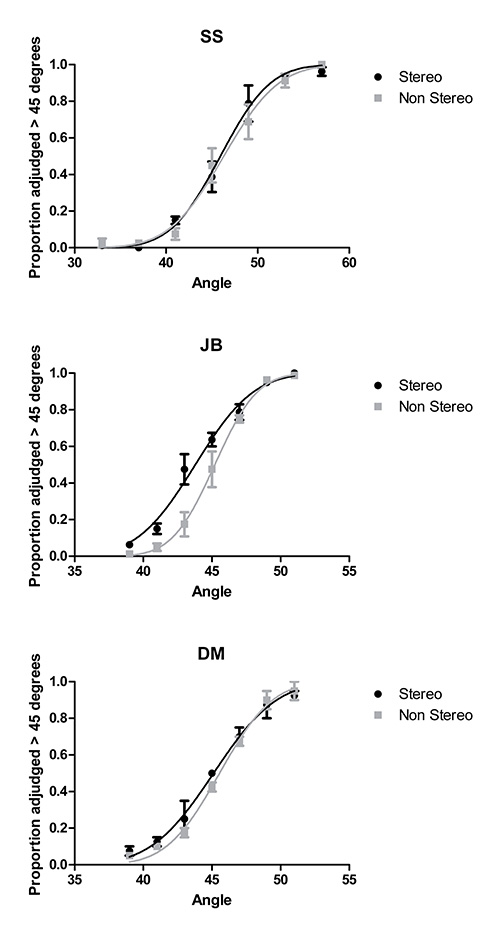
Figure 4. Example results for three observers showing sensitivity to RID/viewpoint change (vertical axes) as a function of the RID angle of the stimuli. Raw data points plot the proportion of time that the test stimulus, here a curved contour, was chosen as being greater than 45° RID. The horizontal axis plots the RID of the test curve. The reference curve was constant at 45° in all conditions. Solid lines show the fitted Cumulative Gaussian function to each set of obtained data. Black points and lines show stereo (different RID image projected to each eye) condition data while Grey points and lines show nonstereo (same RID image projected to each eye) condition data. Click here to view larger image.
