CAUTION: Please consult relevant material safety datasheets before use of hydrogen peroxide, sodium carbonate, ethanol, calcium chloride, and methanol. Ensure to wear all appropriate personal protective equipment including engineering controls while handling chemicals used in this protocol.
1. Extraction of fibroin
- Cut 5 g of cleaned silk cocoons into ~ 1 cm2 small pieces using scissors.
- Boil 2 L of deionized (DI) water in a 2 L beaker on a magnetic hot plate under an extraction hood.
- Add 4.24 g of sodium carbonate gradually and slowly into the boiling water to avoid boiling over and let it dissolve with the help of a magnetic stir bar.
- Wait until the solution starts to boil again and add the cut pieces of cocoons into the solution. Ensure that all the silk is submerged in the solution and keep the solution boiling under constant stirring for 90 min. Cover the beaker lightly with aluminium foil and top up with preheated DI water regularly to replenish water loss due to evaporation.
2. Drying of fibroin
- Remove the extracted fibroin fibers from the sodium carbonate solution with a glass rod or spatula and wash 3x with 1 L of preheated DI water for each wash, gradually decreasing the temperature for every washing step (approximately 60 °C, 40 °C, and room temperature, 25 °C).
- Spread out the fibroin fibers on a 750 mL borosilicate glass crystallizing dish and place it into a drying oven at 60 °C under atmospheric pressure and leave to dry overnight. Once dried, store the fibroin in a closed container at room temperature.
3. Dissolution of fibroin
- Prepare a ternary solution (Ajisawa’s reagent) containing 4.8 g of DI water, 3.7 g of ethanol, and 3.1 g of calcium chloride17.
- Place a two-neck round bottom flask (100 mL) into a water bath, made by filling a 750 mL borosilicate glass crystallizing dish with 600 mL of DI water, on top of a magnetic hot plate. Place the ternary solution inside the flask.
- Place a thermometer in one of the necks to monitor the solution temperature accurately. Cover the other neck with aluminium foil to prevent drying out of the solution due to evaporation (or use a water-cooled reflux condenser). Heat up the solution to 80 °C.
NOTE: Ensure that the bulb of the thermometer is inside the solution. - When the temperature of the solution is stable at 80 °C, remove the aluminium foil and add 1 g of dried fibroin to the solution. Add a small magnetic stir bar to ensure that the solution is mixed well throughout the dissolution process. Cover the second neck again with aluminium foil to minimize evaporation but keep the system open. Leave to dissolve for 90 min.
4. Dialysis of fibroin solution
- After 90 min of dissolution, leave the fibroin solution for 10 min to cool down to room temperature.
- Take one 15 cm long dialysis tube (molecular weight cut-off 12,000−14,000 kDa) and tie a knot in one of the two ends. Wash it for a few minutes with running DI water from the tap.
- Open the other end and pour the fibroin solution inside. Using a metal clamp, close the other end of the dialysis tube ensuring that the tube is closed as tightly as possible. Attach one of the ends of the dialysis tube via a screw cap to an empty 30 mL plastic vial to allow the dialysis tube to float in the water.
- Fill a 2 L beaker with 2 L of DI water and place the dialysis tube inside it. Change the water at regular intervals. Check the conductivity of the water every time it is changed to follow the dialysis process. The dialysis step finishes once the conductivity of the water is below 10 µS/cm.
NOTE: This process usually takes around 24−36 h with 5 changes of water. - After dialysis is complete, cut one end of the dialysis tube with scissors and pour the solution into a series of 1.5 mL tubes. Then, centrifuge for 5 min at 16,000 x g to remove any particles inside the fibroin solution. Collect the supernatant in a 30 mL plastic vial and store it at 4 °C.
5. Determination of RSF solution concentration
- Weigh a clean glass slide (W1). Add 200 µL of silk solution (V1).
- Leave the glass slide in an oven at 60 °C for 2 h.
- Weigh the glass slide again (W2).
- Calculate the concentration of the silk solution (w/v) using the following formula:
6. Preparation of inks for printing
- Prepare ink A (final volume 1.5 mL) by mixing the fibroin solution (40 mg/mL), polyethylene glycol 400 (PEG400; 14 mg/mL) and deionized water for printing the main body of the SPMSs.
- For printing the catalytic engine of the SPMSs, mix fibroin (40 mg/mL), PEG400 (12 mg/mL), catalase (6 mg/mL with catalytic activity of >20,000 units/mg) and deionized water to make 1.5 mL of ink B.
- Prepare 1.5 mL of ink C by dissolving Coomassie brilliant blue (0.05 mg/mL) in methanol.
NOTE: Methanol is used for converting the fibroin random coils to rigid beta sheets by printing ink C on top of ink A or ink B. Coomassie brilliant blue is used to provide a contrasting color of SPMSs to aid auto tracking of the SPMSs during propulsion.
7. Reactive inkjet 3D printing
NOTE: The inkjet printer used in these experiments is based on piezo actuated jetting devices with glass nozzles. There are several commercially available inkjet printers for research that can duplicate these functions.
- Use jetting devices with 80 μm nozzle diameter for printing the inks on a silicon substrate placed on the stage at a working distance between the nozzle and the Si-wafer substrate of around 5 mm. The geometric shapes of the SPMSs are digitally defined as a series of points of X-Y coordinates in a spreadsheet file.
NOTE: The printer reads the coordinates serially and runs the printer accordingly. Each coordinate point makes the printer jet once through the jetting device. Separate spreadsheet files are created for inks A and B (see Supplemental Files [SPMS Main Body.xlsx and SPMS Engine.xlsx]). - Load the three inks (A, B, and C) into three reservoirs (1.5 mL each) and then adjust the backpressure using the backpressure valve for each individual channel to ensure that the ink is not dripping from the jetting devices.
NOTE: Three jetting devices on independent channels are needed. - Adjust the jetting parameters (rise time 1, dwell time, fall time, eco time, rise time 2, idle voltage, dwell voltage, echo voltage) for each channel to ensure that each ink gives a good stable droplet formation (Figure 2).
NOTE: These parameters are jetting device and ink dependant and will need to be adjusted accordingly. - Print the silk fibroin ink layer-by-layer alternating with methanol on clean polished Si-wafer substrates: stage 1, printing of ink A (main body); stage 2: printing of ink C (curing ink); stage 3: printing of ink B (catalytic ink for engine sites); stage 4: printing of ink C (curing ink); stage 5: repeat stages 1-4 for desired layers required (e.g., 100).
NOTE: Two example designs for the 4 stages are included in Supplemental Files; SPMS Main Body.xlsx is used for stage 1 and stage 2, and SPMS Engine.xlsx is used for stage 3 and stage 4. - Print two batches of fibroin SPMSs with 200 layers and 100 layers thickness, respectively.
NOTE: The catalase engine is located on the side of one end of each stirrer. Thus, the stirrers have one catalytic engine (see Figure 1 red region). - To remove the samples off the Si-wafers, immerse samples in DI water and gently agitate until detachment occurs.
8. Data acquisition/tracking and trajectory analysis of self-propelled stirrers
- Clean a glass petri dish (9 cm in diameter) with DI water ensuring that the surface is dust free.
- Once clean and dry, add 10 mL of pre-filtered (0.45 μm) 5% w/v H2O2 into the petri dish and leave to settle. Light up the bottom of the petri dish with a cool white light-emitting diode (LED) light source and use a high-speed camera with macro zoom lens to capture the motion from above. Save videos as .avi files.
NOTE: See Table of Materials for details of the equipment used. - Wash the printed silk stirrers for 10 min by submerging them in DI water to remove any unbound PEG400. Carefully take one washed stirrer with the tip of a sterile syringe needle and place it in the center of the petri dish. When the washed stirrer touches the H2O2 fuel, bubbles start forming around the engine and circular motion of the stirrer is observed. When the system appears stable (usually 10−30 s later), press record in the recording software to start capturing the video.
- Perform tracking of the micro stirrers on a frame by frame basis, tracking each end of the stirrers as indicated by points A and B in Figure 3.
NOTE: This can be done manually or with the aid of tracking software. - From the obtained tracking data, calculate the instantaneous velocity between two consecutive frames (e.g., 1 and 2) using the equation below and average the resulting velocities from the entire sequence to obtain the mean instantaneous velocity.
- Further to this, calculate the angle of orientation φ. Then use the rate of change of φ to determine the rotational velocity (Figure 3).
NOTE: When calculating instantaneous velocities from tracked image data, it is important that the initial image of an object with known dimensions is taken to be able to calculate correct pixel to micrometer values. These values will depend on the camera, objective, and distance used. Depending on the type of printed particle, choose different tracking points for calculating the velocity. For example, here tracking points A, B, and C (center of mass) are all used to determine instantaneous velocities (Figure 3).
9. Characterization of SPMSs by SEM
- Remove unused and used SPMSs from the Si-wafer or bulk solution and transfer them onto 10 mm wide carbon sticky pads mounted onto aluminium scan electron microscopy (SEM) stubs. Dry the samples in a drying oven for 10 min at 60 °C.
- Load the sample stubs onto the sputter coater stage. Sputter coat (argon plasma at 0.05 Torr) 50–100 nm of gold onto the samples, ensuring a homogeneous gold surface coverage of the sample.
- Remove the sample stubs from the sputter coater and image in an SEM under vacuum at 5.0 kV.
NOTE: Very high acceleration voltages can burn the silk and give rise to false features.
After boiling the silk, it is expected that the dried fibers are around one third lighter than before, indicating the successful removal of sericin. During the dissolution of the silk in Ajisawa's reagent, the fibers should be completely dissolved, and a yellow viscous liquid should be recovered. After dialysis, the silk solution should be less viscous but still show a slightly yellow color. If the silk has turned into gel, this indicates that dissolution was not done successfully.
Stable droplets formed from the jetting devices will enable the higher definition of the printed samples. Figure 2 shows an example of a stable single droplet to give good printing results such as the printed silk-stirrers shown in Figure 4. It is normal, depending how viscous the ink is, that spreading occurs on the substrate.
Depending on the inkjet printers used and the droplet size, the distance between each printed droplet needs to be adjusted in such a way that they overlap to generate connected lines. If the droplets are too far apart, the printed structure will break up. In addition to this, if not enough layers are printed, there is a chance of the micro-stirrers breaking when placed into fuel solution. Once the stirrers have been removed off the substrate and washed, placing them into the hydrogen peroxide fuel solution should instantly result in bubbles being formed. The success rate of good bubble release depends strongly on the enzyme activity; if the enzyme activity is low, fewer bubbles will form thus leading to poor propulsion results. Figure 5 shows how the surface morphology of the stirrers is altered due to the bubbles being released from the inner structures generating small pores. A successful micro-stirrer will look similar to the ones that can be seen in Figure 6 and the two Supplemental Videos S1 and S2 respectively.
Figure 6 shows still video frames of two representative, 100-layer (Figure 6A) and 200-layer (Figure 6B) micro-stirrers in 5% H2O2 fuel. The red and green lines indicate the trajectories tracked (see Supplemental Videos S1 and S2). The rotational velocity can be determined by the rate of change of orientation (ɸ, Figure 3) as shown in Figure 7. Comparison of 100-layer and 200-layer catalase doped micro-stirrers shows a distinctive increase in rotational velocity of ~0.6 fold from 60 ± 6 rpm to 100 ± 10 rpm (Figure 7).
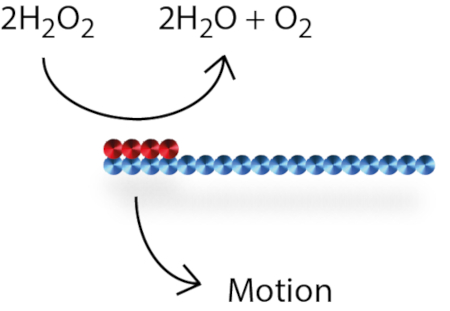
Figure 1: Schematic illustration of the catalytic breakdown of hydrogen peroxide into water and oxygen by catalase embedded in the stirrer's scaffold at desired locations (shown in red). The product oxygen bubbles provide the necessary propulsion for moving the stirrer. Please click here to view a larger version of this figure.
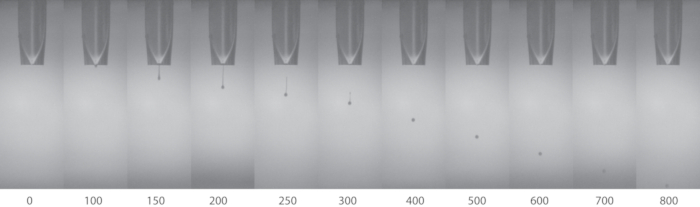
Figure 2: The time lapse images of the droplet formation of RSF from a jetting device (nozzle diameter 80 µm). The numbers below the images represent the time elapsed, in microseconds (µs), since the initiation of jetting of the silk ink droplet. Please click here to view a larger version of this figure.
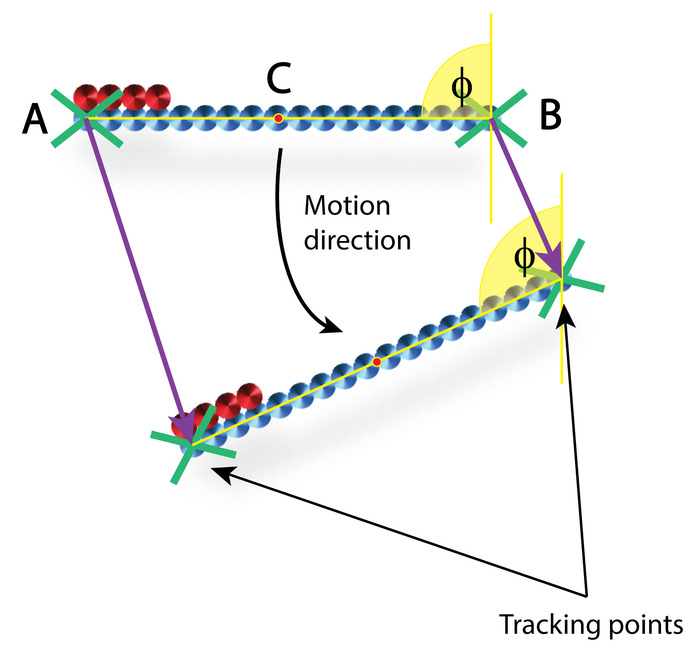
Figure 3: Schematic representation of particle tracking over two consecutive frames. A and B indicate tracking points and C indicates the center of mass. φ indicates the angle of orientation. SPMS trajectory direction is indicated by the curved black arrow. Please click here to view a larger version of this figure.
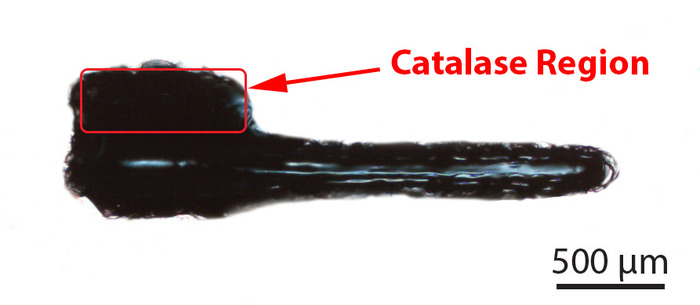
Figure 4: Light micrograph of a freshly RIJ printed micro-stirrer (100 layers) before washing. Red box denotes catalase doped region (engine region). Please click here to view a larger version of this figure.
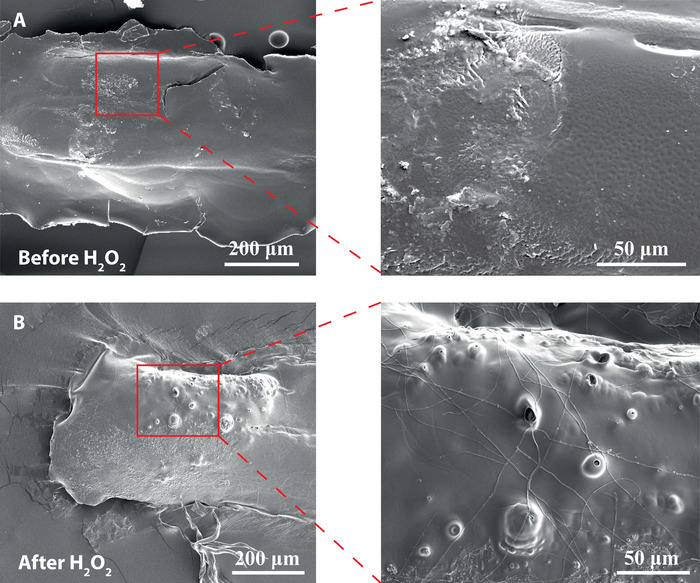
Figure 5: SEM images of the main body and catalase engine part of a SPMS after pores are formed due to bubble release. Pores can be clearly seen on the engine surface in the SEM images of the SPMSs originating from the oxygen bubble release. (A) Silk micro-stirrers before exposure to 5% w/v H2O2 fuel solution. (B) Silk SPMS after exposure to 5% w/v H2O2 fuel solution. Images on the right are enlargements of the red regions. Please click here to view a larger version of this figure.
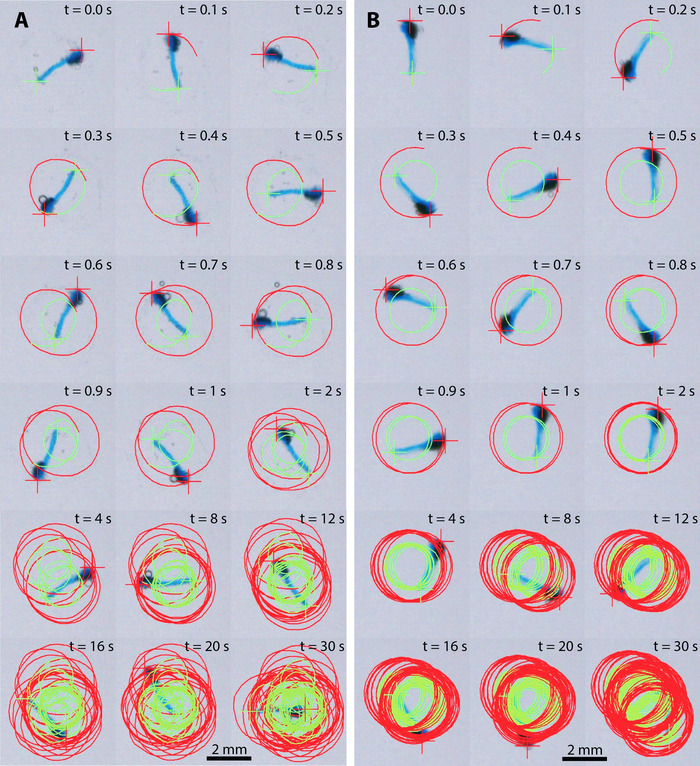
Figure 6: Video frames of two micro-stirrers in 5% fuel solution showing the trajectory over time. (A) 100-layer micro-stirrers. (B) 200-layer micro-stirrers. Please click here to view a larger version of this figure.
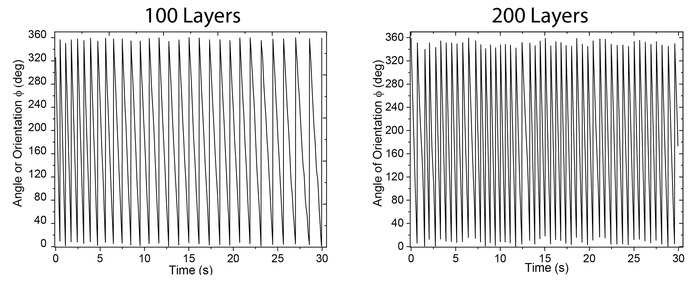
Figure 7: Comparison of angle of orientation (φ) for 100-layer (60 ± 6 rpm) and 200-layer (100 ± 10 rpm) micro-stirrers. Please click here to view a larger version of this figure.
Supplemental Video S1: Representative 100-layer self-motile micro-stirrer in 5% w/v H2O2 undergoing propulsion. Please click here to download this file.
Supplemental Video S2: Representative 200-layer self-motile micro-stirrer in 5% w/v H2O2 undergoing propulsion. Please click here to download this file.
