1. Setup of the Positioning Device
- Wire the positioning device to a microcontroller board, following the instruction in https://github.com/grbl/grbl/wiki/Connecting-Grbl.
- Connect the microcontroller to a single-board computer with internet connection via a USB cable and install the GRBL server as described in https://gitlab.com/FlumeAutomation/GRBL_Server.git. Now the positioning device should be navigable from a webpage hosted at http://IP:5020/. Alternatively, the positioning device can be navigated with a Python script, as demonstrated in the first part of the worked example ImagesAcquisition.ipynb (Supplementary File 2).
2. OCT Setup
- Mount the OCT probe to the positioning device using a compatible dove-tail holder. If required, install an immersion adapter on the objective lens.
- Position the computer and OCT base unit on a bench next to the experiment (e.g., microfluidic devices, flow chambers, flumes, filtration systems). Make sure that the optical cord (maximum length of approx. 1.8 m) is freely moving, long enough to reach all intended locations and not interfering with the experimental setup.
- Install the OCT system together with the available software as described by the manufacturer.
- Install the software packages for automated OCT scan acquisition as described in https://gitlab.com/FlumeAutomation/automated-oct-scans-acquisition.git.
3. Image Acquisition
- Power on the OCT system and the positioning device. Make sure the device can move freely.
- Open the file config.json in a text editor. Edit the config.json file to adjust default image acquisition parameter (Table 2), such as the refractive index (1.33 for water at 20 °C, 1.00 for air) and the destination folder for acquired data and metadata.
- Define the size of the field-of-view (FOV) and the number of A-scans per B-scan in config.json.
NOTE: These two parameters determine the size of the voxels of the final dataset and the size of the output file and should match the optical resolution of the probe (x-y voxel size should not be smaller than half of the optical resolution). The number of A- and B-scans affects the spatial extent to be covered which trades-off against available disk space and processing power. - Define the signal boundaries of the output OCT scan in config.json. These depend on the type of sample. It is thus recommended to determine these parameters based on intensity histograms of a set of preliminary scans. Save the changes in config.json.
- Navigate the OCT probe to a site of interest. Focus the sample and adjust the reference arm and light source intensity for optimal image quality. Repeat this procedure for a number of positions and note the coordinates.
NOTE: This will allow the subsequent automatic OCT scan acquisition around these reference points. Note that the reference arm length and intensity cannot be changed during automated image acquisition. - Open the ImageAcquisition.ipynb file (Supplementary File 2) in Juypter Notebook. Each cell contains code to perform specific tasks and can be run separately via pressing Cell | Run, or Ctrl + Enter or Shift + Enter.
- Set the path to the required libraries and the default configuration parameters. Alternatively, define a new set of temporary parameters.
- Connect to the positioning device and initialize the OCT.
- Calibrate the positioning device (i.e., perform a “homing”).
- Acquire the datasets covering the positions of interests in single-scan or mosaic pattern, specifying the number and the overlap (e.g., 30%) of neighboring tiles.
NOTE: The memory is allocated prior to the scan, which optimizes computer resource use. Data is saved in 8 bits *.raw format to save storage space, into the destination folder defined in config.json, using the time stamp and the position as naming convention (i.e., %Y%m%d_%H%M%S_<position>). Metadata including the OCT settings and coordinates are saved in the same folder in a *.srm file with the same naming convention. Depending on settings such as FOV and resolution, file size may reach up to 1.5 GB per OCT scan.
- To avoid abortion of data acquisition, make sure that there is sufficient free disk space or continuously move OCT datasets to an external hard drive.
4. Image Correction and Display
- Open the Jupyter notebook ImageProcessing.ipynb (Supplementary File 1) for a worked example of OCT image processing (correction of distortion, background subtraction, calculation of elevation maps, elevation map stitching).
- If required, crop OCT scans in order to exclude spurious signals and reoriented the dataset (biofilm should appear above the substratum).
- Correct for spherical aberration. This is accomplished by a correction algorithm that utilizes a highly reflective reference surface known to be flat (e.g., bottom of the flume, substratum). First, the algorithm defines a grid of 20×20 vertical lines regularly spaced across the xy-plane of the OCT scan. Then, it selects a circular area around each point and averages signal intensities along the vertical profile (Figure 2B). The vertical profiles are processed with a modified Gaussian filter:

where x is the input signal, and σ its standard deviation, while C is determined such as:
The reference surface is localized as local maxima in each of these profiles. Misidentified points are filtered based on the positions of their neighbors in three dimensions (Figure 2C). Finally, a 2nd order polynomial surface reflecting the distortion introduced by the scan lens is fitted across these points (Figure 2C). The fitted surface is then used to shift each pixel in z-direction, thus obtaining a flattened image. The parameters of this algorithm should be adjusted to the characteristics of the OCT scan. - Correct for background noise. Identify an empty area of the image (typically above the biofilm) and use the correction algorithm to subtract the average background intensity from the intensity values of the image to produce a final corrected OCT image (Figure 2D).
- Compute an elevation map from the 3D OCT dataset. In this step, define a reference surface of interest for the specific experiment (e.g., the substratum) and an appropriate threshold intensity. Then, use the elevation map calculation algorithm to calculate the thickness of the biofilm for each coordinate (x,y) of the binary mask and assign it to a new 2D matrix (Figure 3A). Thickness values are then assigned to a 2D matrix of the size of the original image in x and y directions. An image is rendered in which the elevation of the surface is reported as grayscale value (Figure 3B).
- In case several OCT scans are taken in a mosaic pattern, define the number of rows and columns and stitch the respective elevation maps. Figure 5 presents examples of stitched elevation maps, covering the broad range of spatial scales and resolutions achievable with the described setup.
We demonstrate the functionality of the automated OCT imaging system using a flume experiment designed to study the spatio-temporal morphogenesis of phototrophic stream biofilms. A gradually narrowing geometry of the flumes induced gradients in flow velocity along the center of the flume (see reference17). The temporal development and structural differentiation of biofilm was monitored over 18 days with the aim to better understand the effects of hydrodynamic conditions on biofilm morphogenesis. Figure 4 demonstrates the growth of a biofilm microcolony followed over 18 days of growth. Surface morphology of the biofilm was quantified using the toolset described above (Figure 4A). Biovolume was calculated (see worked example ImageProcessing.ipynb, Supplementary File 1) for a square moving window with 3.6 mm edge length (Figure 4B) for each position along the flow velocity gradient (Figure 4C). Biofilm accumulation significantly decreased with increasing flow velocity (indicated as the distance from the widest part of the flume; Figure 4). Importantly, this experimental setup allows a continuous measurement of structural parameters (e.g., biovolume, thickness, roughness) along large spatial gradients. Hence, this new tool provides the means to gain insights into relationships between biofilm structure and environmental cues.
| Software component | Description |
| stepcraft.py | A Python library to control the positioning device. It contains definitions for navigating and homing the device. |
| OctControl.cpp | C++ code derived from the Software Development Kit (SDK) distributed with the OCT system. This has to be compiled using VisualStudio 2017, PythonC/API and the SDK. |
| ImagesAcquisition.py | A Python library containing the commands for taking OCT scans in selected positions and defining the scan tiling pattern. |
| ImagesAcquisition.ipynb | Jupyter notebook used to navigate the positioning device, acquire OCT scans and for automated image acquisition. |
| OctCorrection.py | A Python library defining the functions used for the correction of the raw OCT images and background subtraction. |
| OctProcessing.py | A Python library containing the functions to calculate and stitch elevation maps. |
| OctProcessing.ipynb | Jupyter notebook to visualize, correct and process OCT scans. This also contains an example of biovolume calculation. |
Table 1. Software components.
| Parameter | Value | Description |
| Ganymede | 1, 2, 3 | Choice of OCT system and version |
| Probe | 1, 2 | Choice of scan lens |
| nAscans | 32-900 | Number of A-scans per B-scan |
| nBscans | 1-900 | Number of B-scans |
| nCscans | 128-1024 | Number of depth pixels |
| X | 0.1-10 | Size of image in x-direction (mm) |
| Y | 0.1-10 | Size of image in y direction (mm) |
| refr | 1-1.6 | Refractive index (1 for air, 1.33 for water) |
| avg_Ascans | 3 | Number of A-scan averaging |
| scanspeed | 1,2,3 | A-scan Rate (5.5, 15 and 36 kHz) |
| path | “../ %Y-%m-%d_%H_%M_%S” | Destination folder for the acquired OCT scans, uses time stamp as naming confention |
| colorBoundaries | [0.0-256.0,0.0-256.0] | Color boundaries of the acquired scans |
Table 2. OCT parameter settings.
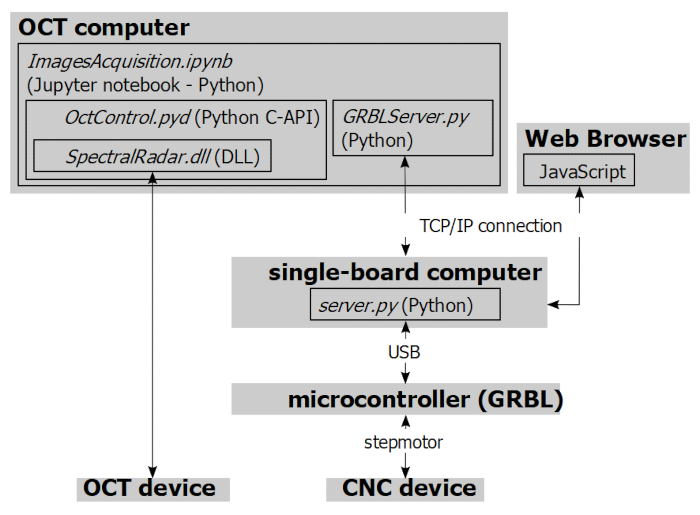
Figure 1. Overview of hard- and software components. The stepmotors of a GRBL-controlled positioning device are wired to a microcontroller, connected via USB to a single-board computer. The GRBL server is installed on the latter, and motion of the positioning device can be controlled from any web browser via TCP/IP connection. Alternatively, navigation of the positioning device can be performed from a Python-encoded Jupyter notebook (ImagesAcquisition.ipynb, Supplementary File 2) using the GRBLServer.py library. The OCT system is connected to a separate computer from which automated OCT scan acquisition can be performed via a Python script. Please click here to view a larger version of this figure.
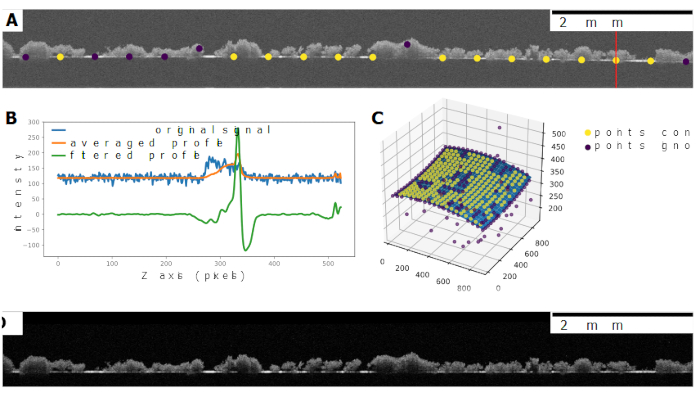
Figure 2. OCT scan correction workflow. Panel A shows a non-processed B-scan of biofilm growing on a flat plexiglass surface. The image is distorted (bend) because of differences in path length of the low coherence light through the lens. OCT image distortion can be corrected by identifying a strongly reflecting, flat reference surface in the image. First, 20×20 reference points are evenly distributed across the entire stack of images. In each of these points, the image signal is averaged across a circular area (in x-y direction) for each depth (z plane), obtaining an averaged depth profile of signal intensity. Then, a modified Gaussian filter is applied to of each of the 400 reference profiles. Panel B provides an example of the original signal along the depth profile indicated by the vertical red line in Panel A, the averaged depth profile, and the same profile after the modified Gaussian filter has been applied. The modified Gaussian filter allows the identification of local maxima in signal intensity, thus identifying the location of the strongly reflecting reference surface. Correctly identified reference points are then selected based on the coordinates of their neighbors in three dimensions. In the example in panel C, the yellow points were kept for subsequent image correction whereas purple ones were discarded. A 2nd order polynomial surface is then fit to the correctly placed reference points and used to correct the distortion in the original OCT image by shifting pixels in z direction. Average background intensity is estimated from an empty area of the image and subtracted from the corrected images. Panel D shows the same B-scan after correction and background subtraction. Please click here to view a larger version of this figure.
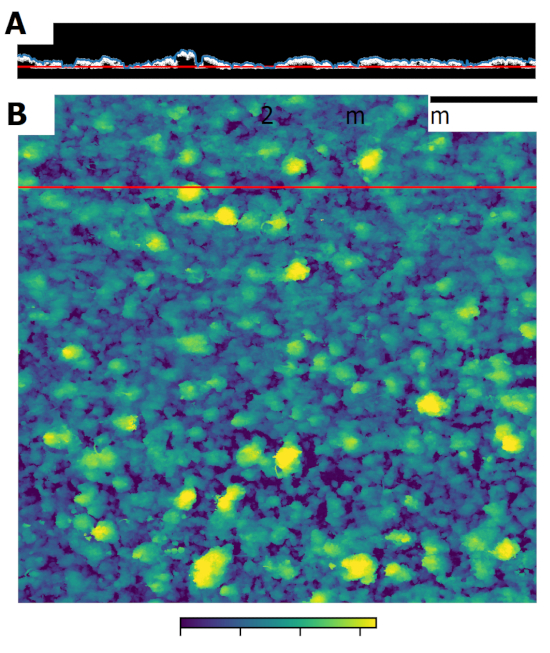
Figure 3. Elevation maps. Biofilm topology can be visualized as 2D elevation maps in which thickness of the biomass is color coded. For this, a 3D OCT image is thresholded and biofilm thickness calculated as the distance of the uppermost signal to the substrate. Panel A shows the binary mask of a B-scan obtained after thresholding. The blue line indicates the uppermost signal while the red line shows the reference surface. Panel B shows an example of the obtained elevation map, scaled according to the axial resolution of the OCT probe. The red line indicates the position of the B-scan in Panel A.
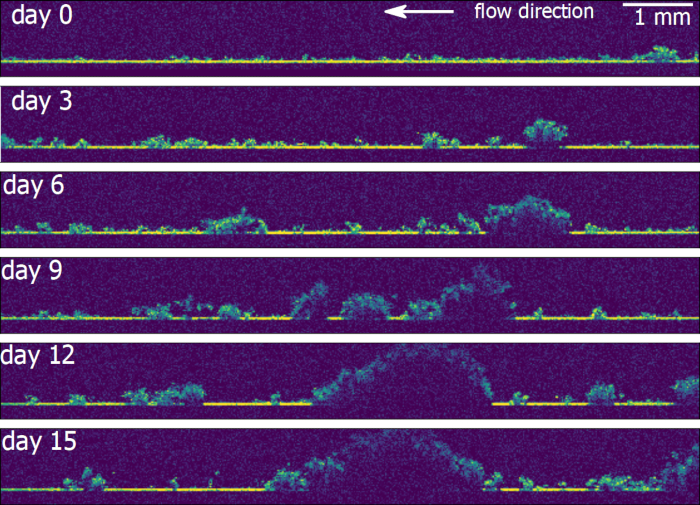
Figure 4. Representative results showing the effect of flow velocity on biofilm growth. We studied phototrophic stream biofilm morphogenesis along a gradient in flow velocity using flume experiments. Flow velocity increased with distance from the inlet of the flume. After 10 days of growth, biofilm morphology was characterized by automated OCT at different resolution and covering different spatial scales. Elevation maps (A, B and C) demonstrate the morphology of biofilm grown under low, medium and high flow velocity, respectively. These elevation maps are calculated from OCT scans with voxels size in x, y direction of 4 μm. The scan surface area is a square of 3.6 mm edge length. Panels D, E and F show elevation maps (low, medium and high flow velocity, respectively) obtained by stitching 3×3 OCT scans with a voxel size in xy-direction of 11 μm, scan area of 10 mm2 and an overlap between neighboring scans of 30%. Panel G shows an elevation map of biofilm growing along the entire velocity gradient achieved in this flume experiment. It was obtained by stitching 3×51 OCT scans with a voxel size in xy-direction of 40 μm, scan area of 10 mm2 and an overlap between neighboring scans of 30%. The total scan area achieved is 24×353 mm. Panel H reports biovolume in a square moving window of 3.6 mm edge. Average biovolume significantly decreased as a function of distance from the inlet (I). Please click here to view a larger version of this figure.
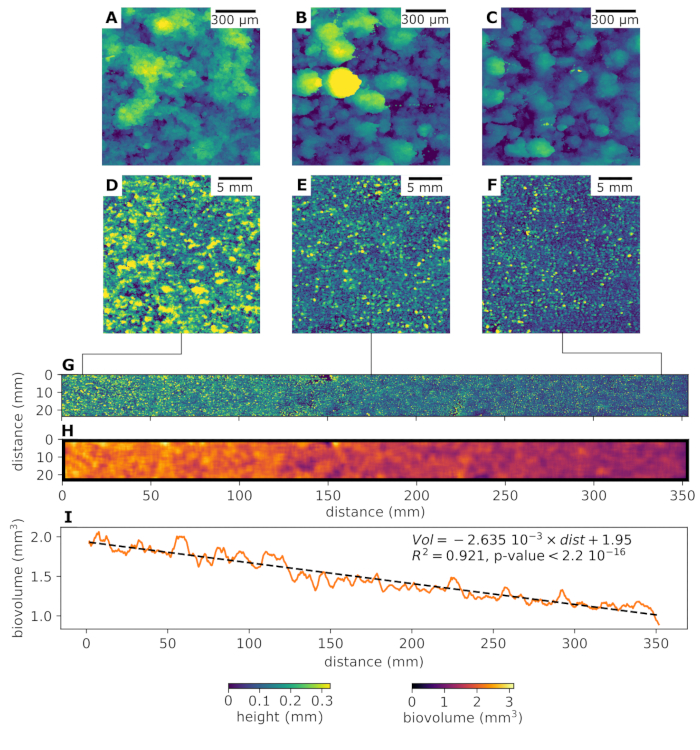
Figure 5. Precision test for the positioning device. The precision of the positioning device was assessed by mounting a 20.2 Megapixels camera equipped with a 35 mm macro lens on the positioning device, focused on a colored mark. The positioning device was moved in a random direction away from the mark and then positioned back for a total of 80 cycles. The position of the mark was then compared. The figure shows the shift in x and y direction with respect to the first picture. Note that the maximum shift is approximately 16 µm in y-direction and even less in x-direction. Please click here to view a larger version of this figure.
Supplementary File 1. ImageProcessing.ipynb. Please click here to download this file.
Supplementary File 2. ImagesAcquisition.ipynb. Please click here to download this file.
