Figure 8 shows the flow rate of the fluid rates for a four-stage platform operation, as mentioned in Table 2. The first stage is the loading state (a state). The platform was supplied with fluid with all valves open, and the working fluid (Qf) and particles (Qp) are almost identical as the microfluidic channel network exhibits structural symmetry. In the second stage (b state), compressed air was transported to Vs to block the particles, and as the Vs diaphragm deformed, the flow path narrowed, and the flow rate measured at the outlet port was reduced by hydraulic resistance. The flow rates of Qf and Qp were almost similar, and the difference was less than 2.67%. In the third stage (c state), compressed air was delivered to Vs and Vp for particle concentration, with Vs and Vp closed and Vf open. The measured Qp was close to zero, and the Qf was about 1.42 times that of the b state. In most cases, the flow rate doubles when both dissipation channels are in operation, but the platform has different types of hydraulic resistance in the main fluid channels and Vs, so the total flow of the working fluid is reduced. Finally (d state), compressed air was delivered only to Vf to collect the concentrated particles, and the flow rates of Qf and Qp were reversed. The flow was zero because Vf blocked Qf, and Qp was about 1.42 times the b state. The concentration ratio of the particles (Qp/(Qf+Qp) × 100) was 3.96-4.53. This shows that the sequential actuation programmed with the pneumatic valve works well due to flow changes.
Figure 9 shows the screen capturing concentrated particles. Figure 9A shows the flow state of the fluid with the three pneumatic valves not actuated, Figure 9B shows the method used to trap the particles, Figure 9C shows the sieve method, and Figure 9D shows the ejection of the concentrated beads. Particles were concentrated and accumulated in the collection area when Vs and Vp were closed, and all collected concentrated particles were released within 4 s when only Vf was closed. Therefore, the device successfully collects many particles suitable for particle collection and concentration.
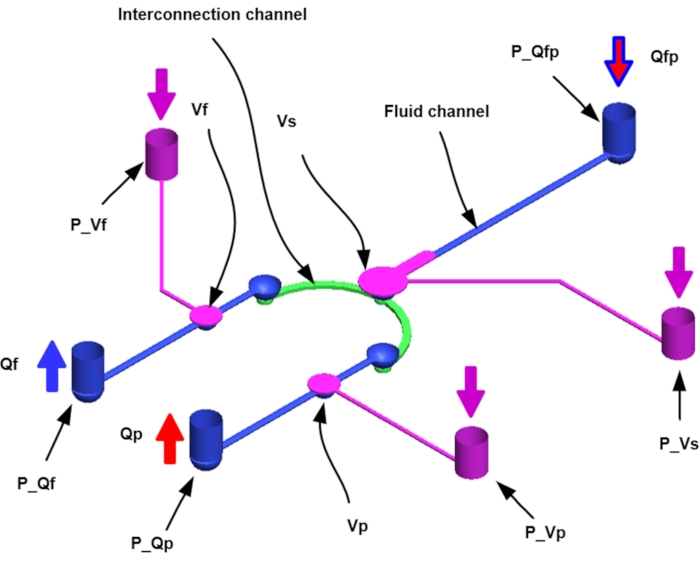
Figure 1: Schematic diagram of a pneumatic microfluidic platform for microparticle concentration (P, port; Q, flowrate; f, fluid; p, particle; V, valve; s, sieve). Please click here to view a larger version of this figure.
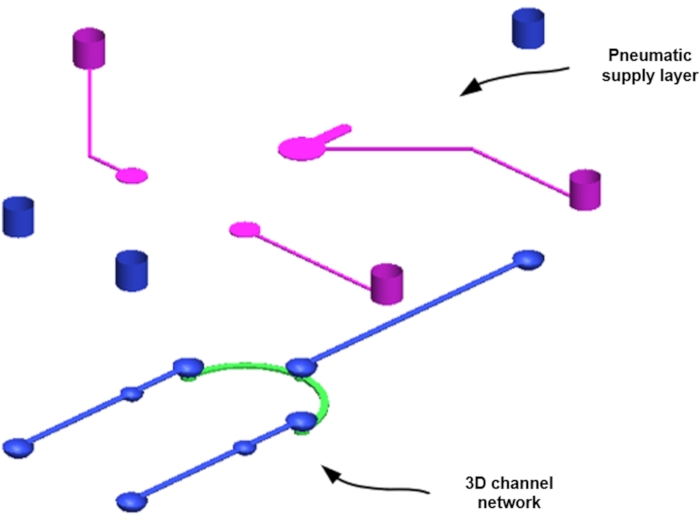
Figure 2: Assembly of the pneumatic microfluidic platform for microparticle concentration. Please click here to view a larger version of this figure.
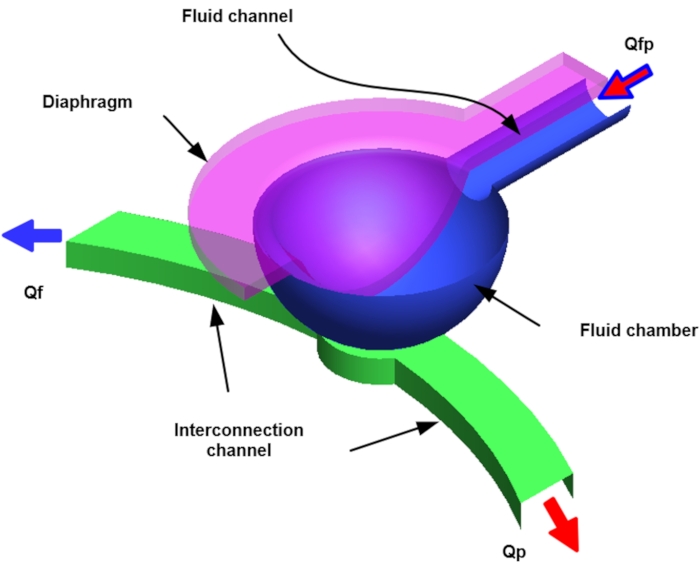
Figure 3: Schematic of Vs in the pneumatic microfluidic platform for microparticle concentration (P, port; Q, flowrate; f, fluid; p, particle; V, valve; s, sieve). Please click here to view a larger version of this figure.
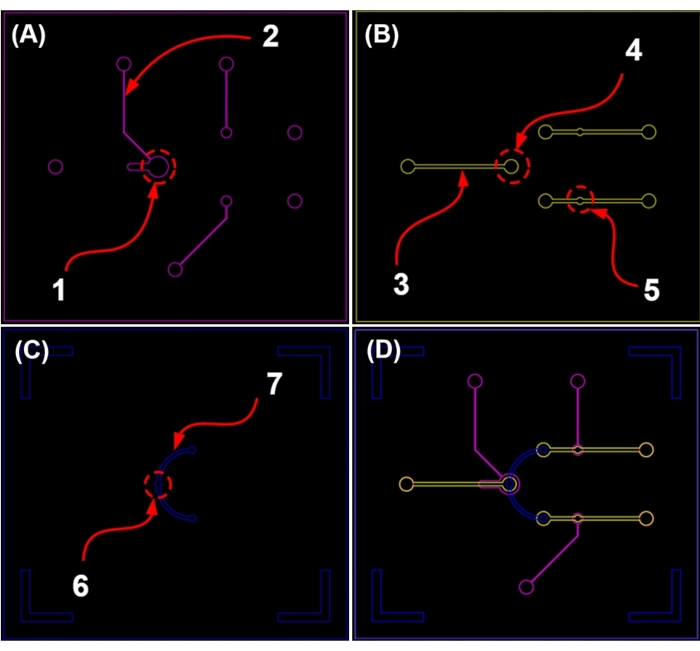
Figure 4: CAD image of the pneumatic microfluidic platform for microparticle concentration. (A) Pneumatic channel valve. (B) Main fluid channel. (C) Interconnection fluid channel. (D) Cross image of each channel (For the dimensions of 1 to 7, see Table 1). Please click here to view a larger version of this figure.
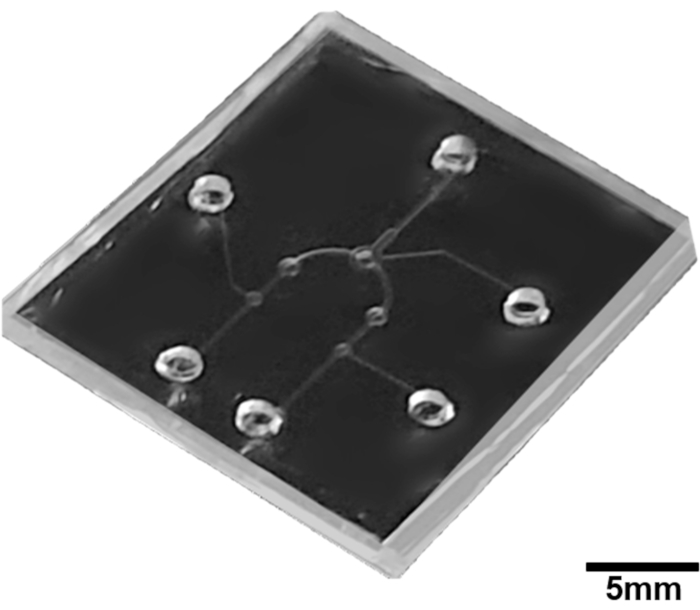
Figure 5: Fabrication image of the pneumatic microfluidic platform for microparticle concentration. Please click here to view a larger version of this figure.
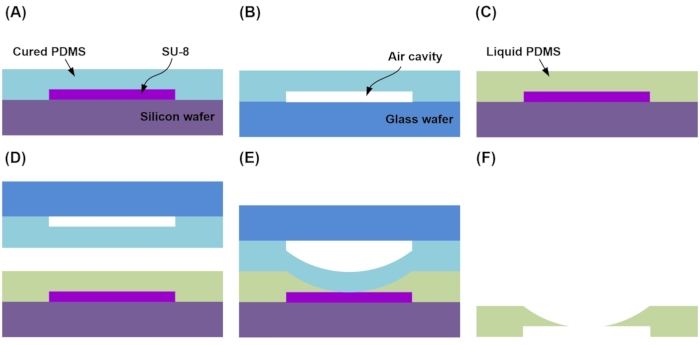
Figure 6: Schematic of the cross-section of the 3D fluidic channel network during fabrication. (A) Molds are created for the curved fluid chamber and fluid channel for replica molding. (B) Plasma bonding of the PDMS layer after curing to a glass wafer. (C) Liquid PDMS is poured into the SU-8 mold to create the interconnection channel. (D) The fluid chamber and fluid channel structure are arranged in liquid PDMS on the SU-8 mold. (E) The system is inflated by the thermal pressure of the air layer. (F) The inflated structure and SU-8 mold are removed. Please click here to view a larger version of this figure.
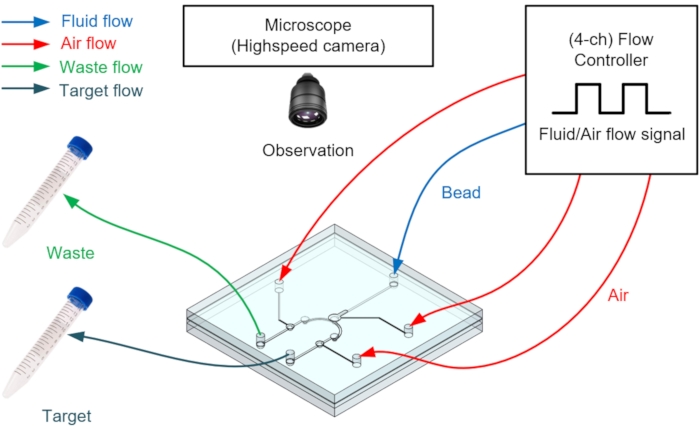
Figure 7: Schematic of the pneumatic microfluidic platform set up for micro-particle concentration. Please click here to view a larger version of this figure.
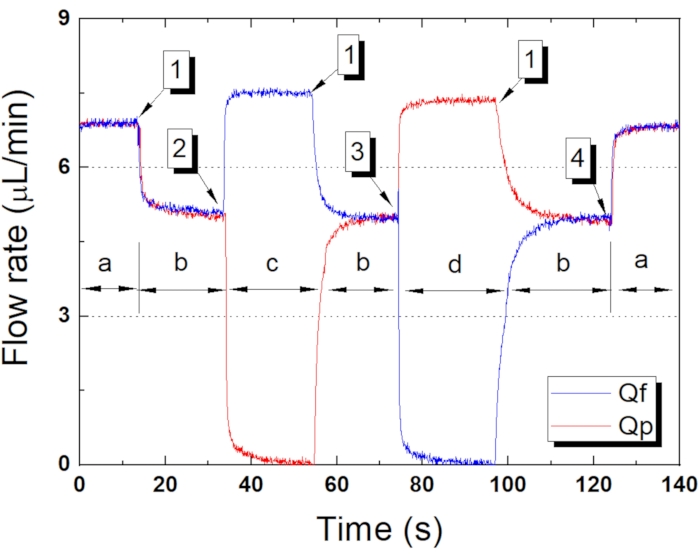
Figure 8: The flow rate of the fluid rates for a four-stage platform operation. The Qf and Qp working fluid flow rates following set Vf and Vp operating times (particle concentration times) in a pneumatic microfluidic platform with a Vs of 15 kPa. a-d show the pneumatic microfluidic platform operation state according to Table 2. (1) Sample loading, (2) Sample blocking, (3) Sample concentration, (4) Sample release. Please click here to view a larger version of this figure.
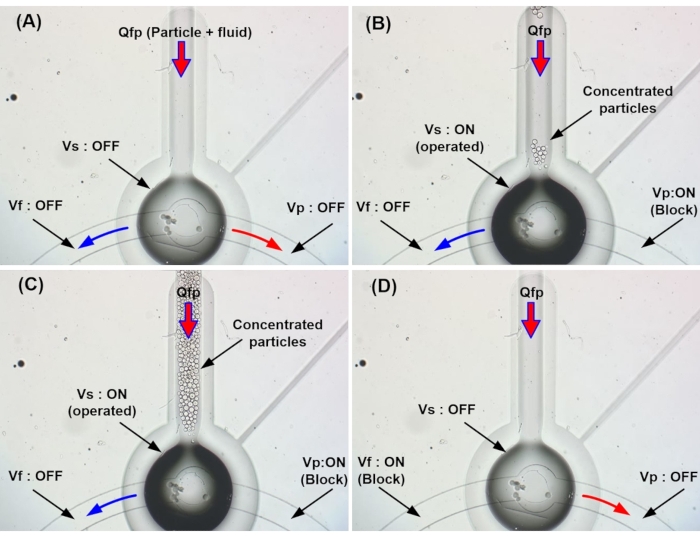
Figure 9: Operation of the microparticle concentrator. (A) Before the operation. (B) Microparticle sieving. (C) Microparticle sieve completion. (D) Release of concentrated particles. Please click here to view a larger version of this figure.
| Number | Structure | Width (W) or diameter (D), (μm) | |||
| 1 | Pneumatic chamber | 1200 (D) | |||
| 2 | Pneumatic channel | 50 (W) | |||
| 3 | Fluid channel | 200 (W) | |||
| 4 | Fluid chamber for Vs | 800 (D) | |||
| 5 | Fluid chamber for Vp (Vf) | 400 (D) | |||
| 6 | Interconnection chamber | 400 (D) | |||
| 7 | Interconnection channel | 200 (W) | |||
Table 1: Dimensions of the pneumatic microfluidic platform (1 to 7 in Figure 4).
| State | Pneumatic Microfluidic Platform Operation |
Pneumatic Valve Operation | |||
| Signal | Vs | Vf | Vp | ||
| a | Loading | 4 | OFF | OFF | OFF |
| b | Blocking | 1 | ON | OFF | OFF |
| c | Concentration | 2 | ON | OFF | ON |
| d | Release | 3 | OFF | ON | OFF |
Table 2: Pneumatic microfluidic platform operation by pneumatic valve operation, shown in Figure 8.
