Den låga temperatur beröringsfri atomkrafts / sveptunnelmikroskop (LT NC-AFM / STM, i följande helt enkelt benämnt SPM) är det bästa sättet för Atomically exakt manipulering av enskilda atomer eller molekyler 1 – 3. SPM-baserad manipulation vanligtvis begränsad till två dimensioner och består av en serie av plötsliga och ofta stokastiska manipulation händelser (hopp). Detta begränsar i huvudsak kontroll över processen. Kontakt molekylen i fråga genom en enkel kemisk bindning vid en väldefinierad atom ställning leder till en strategi som kan övervinna dessa begränsningar 4 – 9. Hela dess manipulation den kontaktade molekylen är ansluten till SPM spetsen så att förflyttning av molekylen i alla tre dimensioner med lämpliga förskjutningar av spetsen blir möjlig. Detta skapar möjlighet för olika komplexa manipuleringsåtgärder som vidtas i 3D-rymden. Emellertid kontakt manipulation kan vara hindered genom interaktioner av den manipulerade molekylen med ytan och / eller andra molekyler i dess omgivningar, som kan skapa krafter som är tillräckligt stora för att spräcka spetsen-molekylen kontakt. Därför ett särskilt 3D banan för SPM spetsen kan eller inte kan leda till en lyckad manipulation händelse. En fråga uppstår därför hur man definierar protokoll som leder till ett framgångsrikt slutförande av manipulation i omständigheterna när spetsen molekyl obligation har en begränsad styrka, medan samspelet mellan den manipulerade molekylen med dess omgivning är inte a priori väl karakteriserade.
Här av denna fråga i den mest intuitiva sätt tänkbara. Försöks tillåts styra förskjutningen av SPM spetsen helt enkelt genom att flytta sin hand 7. Detta uppnås genom koppling av SPM till en kommersiell motion capture-system, en del av vars specifikationer ges nedan. Fördelen med "hand styrd manipulation" (HCM) är i tHan försöks förmåga att prova olika manipulation banor snabbt och lära av deras misslyckande eller framgång.
HCM inställningen har använts för att genomföra en proof-of-principle experiment där ett ord ( "Jülich") var stenciled i en sluten skikt av perylen-3,4,9,10-tetrakarboxylsyradianhydrid (PTCDA) molekyler på Ag ( 111), ta bort 48 molekyler, en efter en, med HCM 7. Lyfta en molekyl från ytan klyver dess intermolekylära vätebindningar som binder molekylerna i monolagret 10. Typiskt den totala styrkan hos de föreliggande intermolekylära bindningar överskrider styrkan hos den enkel kemisk bindning mellan den yttersta atomen i spetsen och en karboxyl-syreatomen i PTCDA genom vilken molekylen bringas i kontakt (se fig 1). Som kan leda till bristning av spetsen-molekylen kontakt och följande fel på manipulation försöket. Försöks uppgift är därför att determine en spets bana som bryter motståndsintermolekylära bindningar sekventiellt snarare än samtidigt, så att den totala kraft som appliceras på spetsen-molekylen kontakt aldrig överstiger dess styrka.
Även om den önskade banan kan i princip simuleras, på grund av storleken och komplexiteten i systemet involverade nödvändiga simuleringar skulle ta en oöverkomligt stor del av tiden. I motsats till detta, med hjälp av HCM var det möjligt att ta bort den första molekylen efter 40 minuter. Mot slutet av försöket utvinning tog redan mycket mindre tid som bekräftar effektiviteten av inlärningsförfarande. Dessutom var noggrannheten och mångsidigheten hos HCM-metoden framgår i agera av omvänd manipulation när en molekyl extraherats från grann platsen användes för att stänga tomrummet efter den felaktiga avlägsnande av en annan molekyl från monolagret.
Motion capture strategi, samtidigt som snabbt och intuitivt, ärbegränsad till alstringen av tip-bana data. För ytterligare systematisk utveckling av nya molekylära manipulation protokoll är det lika viktigt att kunna visa tips bana data i realtid samt att analysera tidigare genererade data. Därför är funktionaliteten för HCM in förbättrad väsentligen genom tillsats av virtuell verklighet glasögon vilka tillåter experimentalist att se de data som plottats i den virtuella 3D-scen där spets bana förstärks av strömmen (I) och frekvensskift (Af) värden uppmätta av SPM i realtid 8 (se nedan). I tillägg till detta, visar den virtuella verkligheten scenen en modell av den manipulerade molekyl som fungerar som en visuell skala referens. HCM inställning kompletteras med den virtuella verkligheten gränssnittet är därför lämplig för systematisk kartläggning av manipulation bana utrymme och successiv förfining av de lovande manipulation protokoll. Förutom att systemet underlättar också kunskapsöverföringen mellan different experiment. Följande punkter ger en beskrivning av installationen och några av dess specifikationer som är relevanta för manipulation experiment.
Experimenten utförs i ultrahögt vakuum (UHV) vid ett grundtryck av 1 x 10 -10 mbar med en kommersiell SPM bestående av en beredning kammare och en analyskammaren. Tillagningskammaren är utrustad med: Ar + källa användes för prov förstoftning, provöverförings via manipulator (tillåter uppvärmning och kylning av ett prov), låg-energi elektrondiffraktion (LEED), en anpassad Knudsen cell (K-cell) innehållande PTCDA pulver renades genom sublimering. Analyskammaren är utrustad med: LN två bad kryostat med en volym på 12 L och en hålltid av 46 h, LHE bath kryostat (5 L, 72 h), Besocke 11 skalbagge-typ SPM utrustad med en stämgaffel sensor 12 ( TFS) som består av en kvartsstämgaffel med en elektriskt ansluten PtIr spets (för STM drift), Som skärs och slipas genom en fokuserad jonstråle (FIB) (Figur 2).
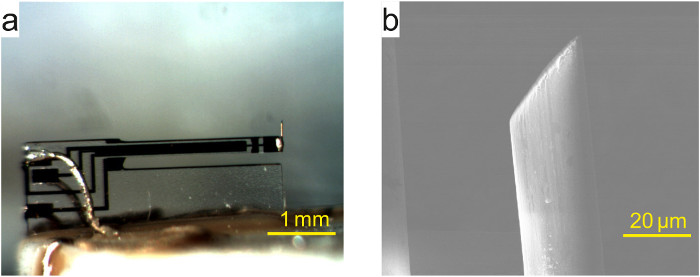
Figur 2. Stämgaffel sensorn. (A) bild av en kommersiell stämgaffel sensor med tillhörande PtIr spets. (B) SEM-bild av PtIr spets spetsen skär med FIB. Klicka här för att se en större version av denna siffra.
AFM drivs i frekvensmodulerade (FM) mod 13 där TFS exciteras vid resonans (f 0 ≈ 31.080 Hz) med en vibrations piezo. Den piezoelektriska signalen för den oscillerande stämgaffeln förstärks och används av en faslåst slinga (PLL), som håller amplituden för TFS s oscillation konstant och spårar ändringar bland de its resonansfrekvens, Af = f – f 0, som har sitt ursprung från gradienten av den kraft som verkar på spetsen. Såsom visas i fig 3 SPM spetspositionen styrs av spänningar (u x, u y, u z) appliceras på en uppsättning av X-, Y-, Z-piezos (piezo konstanter vid 5 K: x = 15, y = 16, z = 6 A / V). U x, är u y u z -voltages (± 10 V vid 20 bitars upplösning) genereras vid SPM elektronik utgångarna. De förstärks ytterligare av en hög spänning (HV) förstärkare som har en maximal utspänning på ± 200 V.
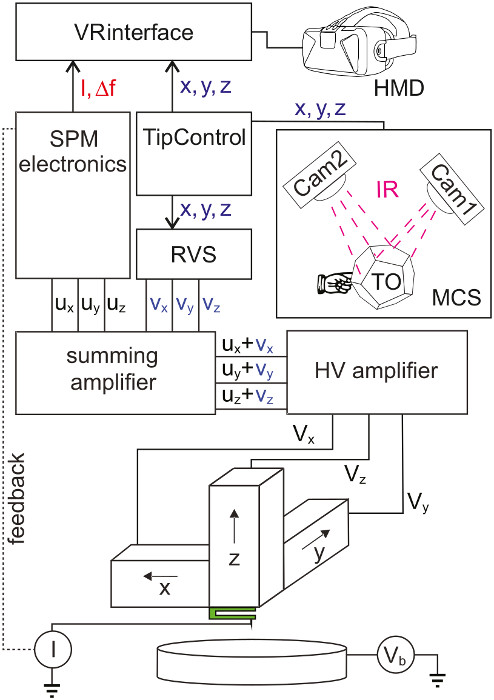
Figur 3. Schema för HCM installationen. Position (spårade objektet) TILL som har flera (infraröd) IR-källor installerade på sin yta spåras av två infraröda kameror för motion capture-systemet (MCS). TipControl såftware erhåller TO koordinater (x, y, z) från MCS och vidarebefordrar den till fjärrspänningskällan (RVS) som genererar en uppsättning av spänningar (v x, v y, v z) som summeras med spänningarna (u x , u y, u z) produceras av SPM elektronik för styrning av SPM spetspositionen. Den tillsatta spänningen passerar genom en högspännings (HV) förstärkare och är vidare appliceras på piezo-positioneringssystemet av SPM spetsen. Installationen möjliggör manuell styrning av spetsen positionering när SPM feedback (FB) slingan är öppen. (X, y, z) positionen av spetsen samt I (x, y, z) och Af (x, y, z) skickas till VRinterface programvara som plottar den i den virtuella 3D-scenen som ses av operatören bär huvudmonterade display (HMD). klicka här för att se en större version av denna siffra.
Tunnel ström som flyter mellan SPM spets ochytan mäts med en transimpedansförstärkare med en variabel förstärkning som sträcker sig från 1 x 03 till 01 Oktober x 10 9 V / A (bandbredd vid förstärkningen ett x 10 9 V / A är ett kHz). Utsignalen från förstärkaren matas in i STM feedback (FB) slinga för att reglera spetshöjden ovanför ytan i konstantströmavsökningsläge. Stabiliteten i korsningen (med TFS svängning avstängd) är 1-3 pm. Den piezoelektriska oscilleringssignal i TFS förstärks i två steg: (1) förförstärkare fäst vid LN 2 sköld (få en x 10 8 V / A, bandbredd 20 kHz), och (2) extern spänningsförstärkare med variabel förstärkning från en x 10 1 5 x 10 4 och en bandbredd på 1 MHz.
För HCM experiment är SPM installationen utökas med: motion capture-system (MCS), fjärrstyrd flerkanalig spänningskälla (RVS), summeringsförstärkaren och virtuell verklighet huvudmonterade display (HMD). Alla de uppräknade enheter utom summing förstärkare förvärvades kommersiellt.
MSC är en infraröd (IR) markör-tracking system som tillåter millimeter upplösning av rumsliga förskjutningar med en hastighet av 100 Hz. Systemet består av två IR-kameror, en trackable objekt (TO) och kontrollmjukvaran. MCS programvara erhåller x-, y-, z-koordinater för TO i 3D-rymden genom att analysera dess bilder som erhållits av de två kamerorna. MCS erbjuder ett programmeringsbibliotek som tillåter användning av koordinaterna för TO i ett separat program.
Koordinaterna för TILL (x TILL y TILL Ö till) skickas till en specialutvecklad programvara programmet "TipControl". Figur 4 visar en skärmdump av det grafiska användargränssnittet. Programvaran aktiveras av "start" -knappen i fönstret. Efter aktivering (τ = 0) programvaran sätter alla v x -, v y -, -voltages mot z på RVS (spänningsområde ± 10 V vid 16bitars upplösning, 50 ms fördröjning per spänningssteg) i enlighet med följande uttryck  etc., där C x, c y, c z är de faktorer som omvandlar 5 cm av förskjutningen av TO till en en förskjutning av SPM spetsen. Faktorerna p x (t), s y (t), p z (t) har värden som definieras av status för x-, y-, z-kryssrutor i fönster programvara. Om rutan är markerad motsvarande p (t) är inställd på 1. All p (t) är satt till 0 i det ögonblick då den "paus" -knappen i fönstret programvara. Som ger operatören möjlighet att tillfälligt "frysa" läget för spetsen. Genom att trycka på knappen "reset all" i fönstret programvara sätter v x -, v y -, -voltages mot z till noll som återför tips till sitt ursprungliga läge definieras av SPM programvara. Textfältet "manuellt kommando för RVS" i fönstret för program ca n användas för att ställa någon av vx -, v y -, -voltages mot z något värde i det tillåtna området ± 10 V. v x -, v y -, -voltages mot z genereras av RVS läggs till u x -, u y -, u z -utgången spänningssignaler av SPM elektronik via en summeringsförstärkare (vinna en, bandbredd 50 kHz, effektområdet ± 10 V).
etc., där C x, c y, c z är de faktorer som omvandlar 5 cm av förskjutningen av TO till en en förskjutning av SPM spetsen. Faktorerna p x (t), s y (t), p z (t) har värden som definieras av status för x-, y-, z-kryssrutor i fönster programvara. Om rutan är markerad motsvarande p (t) är inställd på 1. All p (t) är satt till 0 i det ögonblick då den "paus" -knappen i fönstret programvara. Som ger operatören möjlighet att tillfälligt "frysa" läget för spetsen. Genom att trycka på knappen "reset all" i fönstret programvara sätter v x -, v y -, -voltages mot z till noll som återför tips till sitt ursprungliga läge definieras av SPM programvara. Textfältet "manuellt kommando för RVS" i fönstret för program ca n användas för att ställa någon av vx -, v y -, -voltages mot z något värde i det tillåtna området ± 10 V. v x -, v y -, -voltages mot z genereras av RVS läggs till u x -, u y -, u z -utgången spänningssignaler av SPM elektronik via en summeringsförstärkare (vinna en, bandbredd 50 kHz, effektområdet ± 10 V).
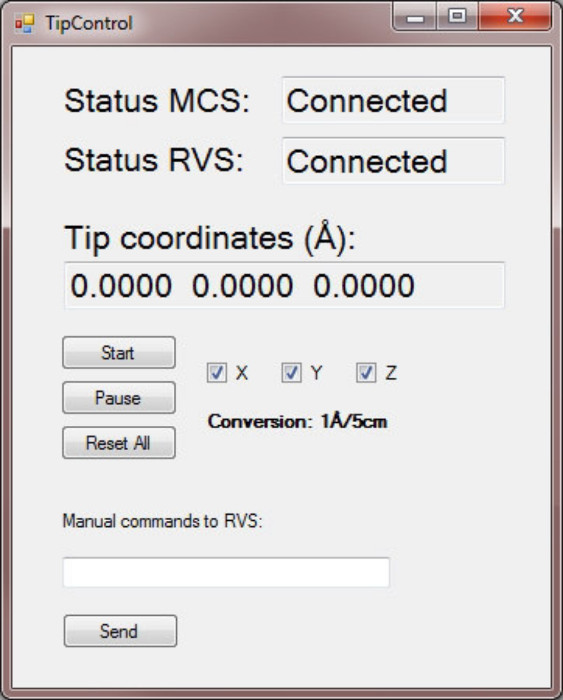
Figur 4. Skärmdump av gränssnittet fönstret. Två indikatorer uppvisar status samband med MCS och RVS system. Kryssrutor används för att aktivera handreglering samt utvalda rumsliga axlar. Knappen "Start" initierar dataflödet mellan MCS, TipControl och RVS enligt det schema som visas i figur 3. Knapp "Paus" stoppar dataflödet. Knapp "Reset All" ställer in alla RVS spänningar till noll.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Klicka här för att se en större version av denna siffra.
För visualisering av experimentella data (spets bana jag, Af) en huvudmonterad display (HMD) används. HMD ger en stereoskopisk vy (delad HD-skärm – en halv för varje öga, 1920 x 1080 pixlar på 75 Hz). En särskild IR-kamera spårar positionen och orienteringen av HMD i 3D-rymden med hjälp av IR-lysdioder fasta på ytan av HMD. HMD-tracking system gör det möjligt för operatören att ändra vyn i 3D virtuell verklighet scen med en sväng av huvudet eller helt enkelt flytta sin kropp.
Den specialskriven mjukvara "VRinterface" samlar in data både från SPM och MCS, gör det i 3D-scenen med hjälp av OpenGL och visar det i HMD med hjälp av utveckling HMDS Software Development Kit (SDK). VRinterface hämtar den faktiska X-, Y-, Z-koordinaterna hos spetsen direkt frånspets programvara (några millisekunder latens) medan jag och Af signaler läses direkt från utgångarna på SPM elektronik (latens ≈ 250 ms). Figur 5 visar en skärmdump av den virtuella 3D-scenen som ses av operatören klädd HMD under HCM. Inne i 3D virtuella scenen spetsen spetsen återges som en vit sfär. Färgning av de inspelade spets banor återspeglar värden av antingen log (I (x, y, z)) eller Af (x, y, z). Växla mellan log (I (x, y, z)) eller Af (x, y, z) färglägen sker genom att trycka på en knapp. En annan knapp initierar inspelning (och visa) av experimentella spets bana data. Trycker du igen på knappen stoppar inspelningen. Den virtuella scen visar också en statisk PTCDA molekyl som används som en visuell hjälp under manipulation. Operatören justerar dess orientering manuellt för att passa orienteringen av den verkliga molekylen på ytan genom att använda knapparna på ett tangentbord.
Varning: Eftersom huvudet tinredningar av HMD förlitar sig på IR-lysdioder kan störa MCS eftersom den använder också IR-ljus för att spåra position TO. Därför TILL måste ha en unik form som känns igen av MCS. Detta hjälper MCS att skilja mellan de signaler som kommer från TO och de som kommer från IR-lysdioder i HMD.
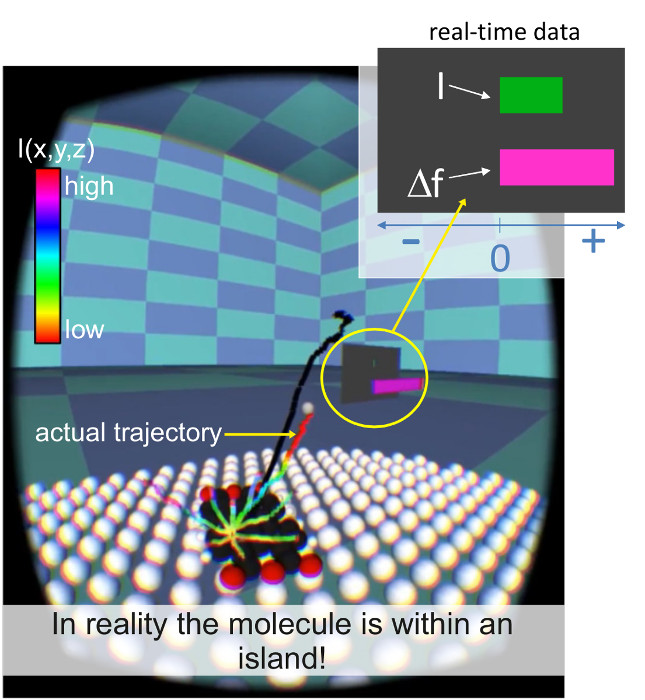
Figur 5. S creenshot av den virtuella 3D-scenen visas för operatören i HMD under HCM. En uppsättning av vita kulor bildar en modell Ag (111) yta. Orientering av modellytan behöver inte nödvändigtvis sammanfalla med orientering av provet. En modell av PTCDA molekylen placeras ovanför modellytan. C, O, H-atomer i PTCDA visas i svart, rött och vitt respektive. I syfte att bekvämlighets azimutiska orienteringen av modellmolekylen kan justeras för att passa orienteringen av den verkliga molekylen valdaför manipulation. Spets positionen markeras med en vit sfär som representerar den yttersta spetsen spetsen atom. Realtids I (x, y, z) och Af (x, y, z) -data visas som streckindikatorer placerade intill spetsen. Tidigare registrerades liksom de nu genomförda manipulationer visas som 3D-banor vars färg representerar antingen log (I (x, y, z)) eller Af (x, y, z) värden som uppmätts på motsvarande positioner på banan. Figuren visar banor som är färgade med log (I x, y, z) () signal. Kan växlas färgkontrast mellan log (I (x, y, z)) och Af (x, y, z) lägen genom att trycka på en knapp. Klicka här för att se en större version av denna siffra.
