Die Niedertemperatur – berührungslosen Atomkraft / Rastertunnelmikroskop (LT NC-AFM / STM, im folgenden einfach bezeichnet SPM) ist das Werkzeug der Wahl für atomar präzise Manipulation einzelner Atome oder Moleküle von 1 bis 3. SPM basierte Manipulation wird typischerweise auf zwei Dimensionen begrenzt und besteht aus einer Reihe von abrupten und oft stochastische Manipulationsereignisse (Sprünge). Dies begrenzt im wesentlichen die Kontrolle über den Prozess. Kontakt zu der fragliche Molekül durch eine einzige chemische Bindung an einem gut definierten Atom Position führt zu einem Ansatz, der diese Einschränkungen 4 überwinden kann – 9. Während seiner Manipulation wird das kontaktierte Molekül an die SPM-Spitze verbunden ist, so dass in allen drei Dimensionen durch entsprechende Verschiebungen der Spitze des Moleküls bewegt wird möglich. Dies schafft die Möglichkeit für verschiedene komplexe Manipulation Verfahren im 3D-Raum durchgeführt. Jedoch ist die Kontaktaufnahme mit Manipulation kann hallo seinndered durch Wechselwirkungen des manipulierten Moleküls mit der Oberfläche oder / und anderen Molekülen in seiner Umgebung, die Kräfte erzeugen können, die groß genug sind, um die Spitze-Molekül Kontakt zu bersten. Daher ist eine besondere 3D-Bahn der SPM-Spitze führen oder auch nicht in einer erfolgreichen Manipulation Ereignis kann. Eine Frage stellt sich also, wie Protokolle zu definieren, die unter den gegebenen Umständen zum erfolgreichen Abschluss der Manipulation führen, wenn die Spitze-Molekül-Bindung eine begrenzte Festigkeit aufweist, während die Wechselwirkungen des manipulierten Molekül mit seiner Umgebung sind nicht a priori gut charakterisiert.
Hier wird diese Frage in den meisten intuitive Art und Weise vorstellbar genähert. Der Experimentator darf einfach die Verschiebungen des SPM – Spitze zu steuern , indem ihre Hand 7 zu bewegen. Dies wird durch die Kopplung des SPM zu einem kommerziellen Bewegungserfassungssystem erreicht, einige der Spezifikationen davon sind unten angegeben. Der Vorteil von "Hand gesteuert Manipulation" (HCM) ist in ter Experimentators Fähigkeit, verschiedene Manipulations Trajektorien schnell und lernen aus ihren Erfolg oder Misserfolg zu erproben.
Das Setup-HCM wurde ein Proof-of-Principle-Experiment, bei dem ein Wort ( "JÜLICH") wurde stenciled in einer geschlossenen Schicht von Perylen-3,4,9,10-tetracarbonsäuredianhydrid (PTCDA) Moleküle auf Ag zu leiten verwendet ( 111), Entfernen von 48 Molekülen, nacheinander mit HCM 7. Anheben eines Moleküls von der Oberfläche spaltet seine intermolekularen Wasserstoffbindungen , die die Moleküle in der Monoschicht 10 binden. Typischerweise übersteigt die Gesamtstärke der gegenwärtigen intermolekularen Bindungen der Stärke der einzelnen chemischen Bindung zwischen dem äußersten Atom der Spitze und einer Carbonsauerstoffatom PTCDA , durch die das Molekül in Kontakt gebracht wird (siehe Abbildung 1). Das kann zum Bruch der Spitze Molekülkontakt und dem folgenden Ausfall des Manipulationsversuch führen. Die Aufgabe des Experimentators ist somit zu Bestimne eine Spitze Trajektorie, die die Widerstandsintermolekularen Bindungen sequentiell und nicht gleichzeitig unterbricht, so daß die Gesamtkraft auf die Kontaktspitze-Molekül aufgebracht überschreitet nie seine Stärke.
Obwohl die Solltrajektorie prinzipiell simuliert werden kann, aufgrund der Größe und Komplexität des Systems involviert die notwendigen Simulationen einen prohibitiv großen Menge an Zeit in Anspruch nehmen würde. Im Gegensatz dazu, unter Verwendung von HCM war es möglich, das erste Molekül nach 40 min zu entfernen. Gegen Ende des Experiments wurde die Extraktion bereits viel weniger Zeit, die die Wirksamkeit des Lernvorgang bestätigt. Zusätzlich wurde die Genauigkeit und Vielseitigkeit des HCM-Methode in der Tat der Reverse-Manipulation nachgewiesen, wenn ein Molekül aus dem benachbarten Ort extrahiert wurde verwendet, um die Lücke gelassen, nachdem der fehlerhafte Entfernung eines anderen Moleküls von der einschichtigen zu schließen.
Motion-Capture-Ansatz, während eine schnelle und intuitive zu sein, istzur Erzeugung von Spitze-Bahndaten beschränkt. Für weitere systematische Entwicklung neuer molekularer Manipulation Protokolle ist es ebenso wichtig, dass die Spitze Bahndaten in Echtzeit sowie zu analysieren, die zuvor generierten Daten in der Lage sein zu sehen. Daher wird die Funktionalität des HCM Einrichtung verbessert wesentlich durch virtuelle Realität Brille Zugabe, die der Experimentator ermöglichen, die Daten in der virtuellen 3D-Szene, aufgetragen, um zu sehen, wo die Spitze Trajektorie durch den Strom (I) verstärkt wird und Frequenzverschiebung (& Dgr; f) gemessenen Werte durch das SPM in Echtzeit 8 (siehe unten). Zusätzlich dazu zeigt die virtuelle Realität Szene ein Modell des Stell Molekül, das als eine visuelle Skala Referenz dient. So ist die Einrichtung von der virtuellen Realität-Schnittstelle ergänzt HCM ist für die systematische Kartierung der Manipulation Trajektorienraum geeignet und sukzessive Verfeinerung der vielversprechenden Manipulation Protokolle. Außerdem, dass das System erleichtert auch den Wissenstransfer zwischen different Experimente. Die folgenden Abschnitte geben eine Beschreibung des Aufbaus und einige seiner Spezifikationen, die für die Manipulation Experimente relevant sind.
Die Experimente werden in Ultrahochvakuum (UHV) bei einem Basisdruck von 1 x 10 -10 mbar mit einem handelsüblichen SPM durchgeführt , bestehend aus einer Vorbereitungskammer und einer Analysekammer. Die Vorbereitungskammer ist ausgestattet mit: Ar + Quelle für Probe – Sputtern verwendet, Probentransfer über Manipulator (ermöglicht Heizen und Kühlen einer Probe), Niedrigenergie – Elektronenbeugung (LEED), eine angepasste Knudsen – Zelle (K-Zelle) PTCDA Pulver durch Sublimation gereinigt. Mit einem Volumen von 12 L LN 2 Bad Kryostaten und einer Haltezeit von 46 Stunden, LHe Bad Kryostaten (5 l, 72 h), Besocke 11 Käfer-Typ SPM mit einem Stimmgabel – Sensor ausgestattet 12 (: Die Analysekammer ist ausgestattet mit TFS), bestehend aus einem Quarz Stimmgabel mit einem elektrisch verbunden PtIr Spitze (für STM-Betrieb), Die durch einen fokussierten Ionenstrahl (FIB) (Abbildung 2) geschnitten und geschliffen wird.
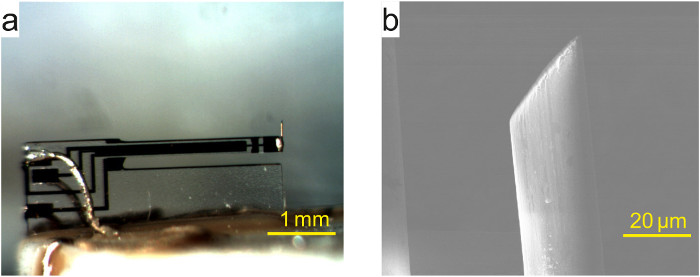
Abbildung 2. Stimmgabel Sensor. (A) Bild einer kommerziellen Stimmgabel Sonde mit angebautem PtIr Spitze. (B) REM – Aufnahme des mit FIB schneiden Spitze PtIr Spitze. Bitte hier klicken , um eine größere Version dieser Figur zu sehen.
Das AFM wird in dem frequenzmodulierten (FM) Modus 13 betrieben , in dem das TFS bei der Resonanz erregt ist (f 0 ≈ 31.080 Hz) mit einem Dither piezo. Das piezoelektrische Signal des oszillierenden Stimmgabel wird durch eine Phasenregelschleife (PLL) amplifiziert und verwendet wird, die die Amplitude der Schwingung Constants TFS hält und verfolgt Änderungen von its Resonanzfrequenz, & Dgr; f = f – f 0, die von der Steigung der Kraft auf die Spitze wirkenden stammt. Wie in Figur 3 ist die SPM – Spitze gezeigten Position durch Spannungen gesteuert wird (u x, u y, u z) in einen Satz von x- angewendet, y-, z-Piezos (piezo Konstanten bei 5 K: x = 15, y = 16, z = 6 Å / V). Die u x, u y, u z -Spannungen (± 10 V bei 20 Bit Auflösung) an den SPM Elektronik Ausgänge erzeugt. Sie werden weiter durch eine Hochspannung (HV) Verstärker verstärkt, der eine maximale Ausgangsspannung von ± 200 V hat
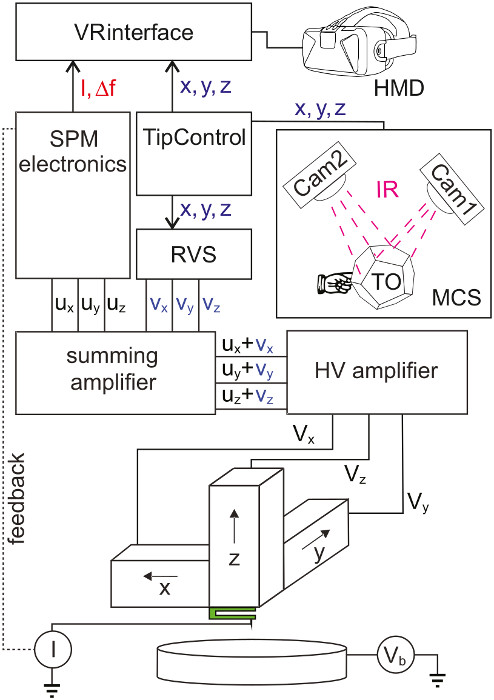
Abbildung 3. Schema des HCM – Setup. Die Position (nachverfolgt Objekt) das hat mehrere (Infrarot) IR – Quellen auf seiner Oberfläche installiert wird von zwei Infrarotkameras der Motion – Capture – System (MCS) verfolgt. TipControl software erhält der TO – Koordinaten (x, y, z) von MCS und übergibt sie an die entfernte Spannungsquelle (RVS) , die einen Satz von Spannungen (v x, v y, v z) erzeugt , die mit den Spannungen summiert werden (u x , u y, u z) durch die SPM – Elektronik zur Steuerung der SPM Spitzenposition erzeugt. Die addierte Spannung läuft durch eine Hochspannung (HV) Verstärker und wird weiter an das piezoPositionierungsSystem der SPM-Spitze aufgetragen. Das Setup ermöglicht die manuelle Steuerung der Spitze Positionierung, wenn die SPM-Feedback (FB) Schleife geöffnet ist. Die (x, y, z) Position der Spitze als auch I (x, y, z) und & Dgr; f (x, y, z) werden an die VRinterface Software übergeben, die sie in der virtuellen 3D-Szene durch die Bedienungsperson gesehen plottet die Head-Mounted Display (HMD) tragen. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
Der Tunnelstrom, der zwischen dem SPM-Spitze fließt unddie Oberfläche durch einen Transimpedanzverstärker mit einem variablen Verstärkungsfaktor gemessen wird , das (bei Verstärkung 1 x 10 9 V / A beträgt 1 kHz Bandbreite) von 1 x Oktober 3-01 x 10 9 V / A liegt. Der Ausgang des Verstärkers wird in das STM-Feedback (FB) Schleife zugeführt, die Spitzenhöhe über der Oberfläche in konstantem Strom Abtastmodus zu regulieren. Die Stabilität der Kreuzung (mit der TFS Schwingung ausgeschaltet) 1-3 pm. Das piezoelektrische Schwingungssignal des TFS wird in zwei Stufen amplifiziert: (1) Vorverstärkers an die 2 shield LN fixiert (Verstärkungs 1 x 10 8 V / A, Bandbreite 20 kHz), und (2) externe Spannungsverstärker mit variabler Verstärkung von 1 10 x 1 bis 5 x 10 4 und eine Bandbreite von 1 MHz.
Für HCM Experimenten wird die SPM-Setup erweitert mit: Motion-Capture-System (MCS), fernsteuerbare mehrkanaligen Spannungsquelle (RVS), Summierverstärker und Virtual-Reality-Head Mounted Display (HMD). Alle aufgeführten Geräte mit Ausnahme des summing Verstärker wurden im Handel erworben.
MSC ist ein Infrarot (IR) marker-Tracking-System, das mit einer Rate von 100 Hz Millimeter-Auflösung der räumlichen Verschiebungen ermöglicht. Das System besteht aus zwei IR-Kameras, ein verfolgbaren Objekt (TO) und die Steuerungssoftware. Die MCS-Software erhält die x-, y-, z-Koordinaten des TO im 3D-Raum durch seine Bilder von den beiden Kameras erhalten zu analysieren. MCS bietet eine Programmierbibliothek, die Verwendung der Koordinaten von TO in einem separaten Software-Programm ermöglicht.
Die Koordinaten von TO (x, y TO, z TO) an einem speziell entwickelten Software – Programm "TipControl" bestanden. Abbildung 4 zeigt einen Screenshot der grafischen Benutzeroberfläche. Die Software wird von der Schaltfläche "Start" im Fenster aktiviert. Nach der Aktivierung (τ = 0) die Software alle v x – Sets -, v y -, -Spannungen v z auf RVS (Spannungsbereich ± 10 V bei 16Bit Auflösung, 50 msec Latenz pro Spannungsschritt) gemäß dem folgenden Ausdruck  usw., wobei c x, c y, c z sind die Faktoren , die 5 cm von der Verschiebung des TO in 1 eine Verschiebung der SPM – Spitze umzuwandeln. Die Faktoren p x (t), P y (t) p z (t) haben Werte , die durch den Status der x- definiert, y-, z-Ankreuzfelder in Software – Fenster. Wenn das Kästchen angekreuzt wird dann die entsprechende p (t) auf 1 gesetzt Alle p (t) auf 0 im Moment gesetzt werden, wenn die "Pause" -Taste in der Software-Fenster gedrückt wird. Das ermöglicht dem Bediener, um vorübergehend die Position der Spitze "einzufrieren". Durch Drücken der "Reset alle" in der Software – Fenster setzt v x -, v y -, v z -Spannungen auf Null , die die Spitze in seine Ausgangsposition durch die SPM – Software definiert zurück. Das Textfeld "Hand Befehl RVS" im Software-Fenster ca n eine der v x eingestellt werden -, v y -, v z -Spannungen auf einen beliebigen Wert im zulässigen Bereich von ± 10 V. Der V x -, v y -, v z -Spannungen von RVS generiert werden hinzugefügt zur u x -, u y -, u z -Ausgang Spannungssignale SPM Elektronik über einen Summierverstärker (Verstärkung 1, Bandbreite 50 kHz, Ausgangsbereich ± 10 V).
usw., wobei c x, c y, c z sind die Faktoren , die 5 cm von der Verschiebung des TO in 1 eine Verschiebung der SPM – Spitze umzuwandeln. Die Faktoren p x (t), P y (t) p z (t) haben Werte , die durch den Status der x- definiert, y-, z-Ankreuzfelder in Software – Fenster. Wenn das Kästchen angekreuzt wird dann die entsprechende p (t) auf 1 gesetzt Alle p (t) auf 0 im Moment gesetzt werden, wenn die "Pause" -Taste in der Software-Fenster gedrückt wird. Das ermöglicht dem Bediener, um vorübergehend die Position der Spitze "einzufrieren". Durch Drücken der "Reset alle" in der Software – Fenster setzt v x -, v y -, v z -Spannungen auf Null , die die Spitze in seine Ausgangsposition durch die SPM – Software definiert zurück. Das Textfeld "Hand Befehl RVS" im Software-Fenster ca n eine der v x eingestellt werden -, v y -, v z -Spannungen auf einen beliebigen Wert im zulässigen Bereich von ± 10 V. Der V x -, v y -, v z -Spannungen von RVS generiert werden hinzugefügt zur u x -, u y -, u z -Ausgang Spannungssignale SPM Elektronik über einen Summierverstärker (Verstärkung 1, Bandbreite 50 kHz, Ausgangsbereich ± 10 V).
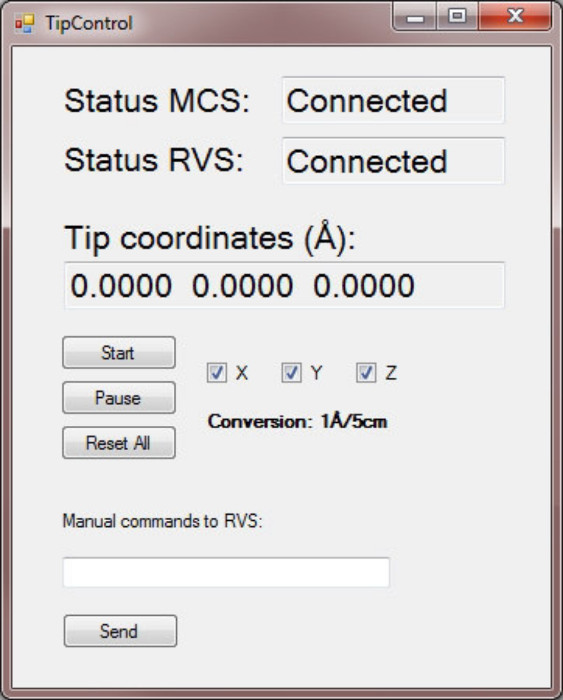
Abbildung 4. Screenshot des Interface – Fenster. Zwei Indikatoren zeigen den Status der Verbindung mit MCS und RVS – Systemen. Ankreuzfelder werden verwendet, Handsteuerung entlang ausgewählter Raumachsen zu aktivieren. Über die Schaltfläche "Start" startet den Datenfluss zwischen MCS, TipControl und RVS nach dem Schema in Abbildung 3 dargestellt. Schaltfläche "Pause" stoppt den Datenfluss. Schaltfläche "Alle zurücksetzen" setzt alle RVS Spannungen auf Null.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" target = "_ blank"> Bitte klicken Sie hier, um eine größere Version dieser Figur zu sehen.
Zur Visualisierung der experimentellen Daten (Spitze Bahn, I, Af) ein Head Mounted Display (HMD) verwendet wird. Die HMD liefert eine stereoskopische Ansicht (Split-HD-Display – die eine Hälfte für jedes Auge, 1.920 x 1.080 Pixeln bei 75 Hz). Eine spezielle IR-Kamera verfolgt die Position und Orientierung der HMD im 3D-Raum unter Verwendung von IR-LEDs auf der Oberfläche des HMD fixiert. Die HMD-Tracking-System ermöglicht es dem Bediener durch eine Drehung des Kopfes den Blick in die 3D-Virtual-Reality-Szene zu verändern oder einfach ihren Körper zu bewegen.
Die individuell geschriebenen Software "VRinterface" sammelt die Daten sowohl von SPM und MCS, macht es in der 3D-Szene mit OpenGL und zeigt sie in der HMD mit Hilfe der HMDs Software Development Kit (SDK). VRinterface ruft die tatsächlichen x-, y-, z-Koordinaten der Spitze direkt aus demTip – Software (wenige Millisekunden Latenz) , während ich und Af – Signale direkt von den Ausgängen der SPM – Elektronik (Latenz ≈ 250 ms) gelesen werden. Abbildung 5 zeigt einen Screenshot der virtuellen 3D – Szene , wie durch den Bediener gesehen während HCM HMD zu tragen. Innerhalb der virtuellen 3D-Szene wird die Spitze Spitze als weißer Kugel gemacht. Die Färbung der aufgezeichneten Spitzen Trajektorien spiegelt Werte von entweder log (I (x, y, z)) oder & Delta; f (x, y, z). Umschalten zwischen log (I (x, y, z)) oder & Delta; f (x, y, z) Farbmodi wird durch die Knopfdruck erfolgen. Eine weitere Taste löst die Aufnahme (und Anzeigen) der experimentellen Spitze Bahndaten. Wenn sie gedrückt wieder stoppt die Taste, um die Aufnahme. Die virtuelle Szene zeigt auch eine statische PTCDA Molekül, das als visuelle Hilfe bei der Manipulation verwendet wird. Die Bedienungsperson richtet seine Ausrichtung manuell die Ausrichtung des realen Molekül auf der Oberfläche auf einer Tastatur unter Verwendung von Tasten zu passen.
Achtung: Da der Kopf tAbstich von HMD stützt sich auf IR-LEDs, mit dem MCS stören können, da sie auch IR-Licht zu verfolgen, die Position von TO verwendet. Daher muss eine einzigartige Form der MCS erkannt zu haben. Dies trägt dazu bei MCS zwischen den Signalen zu unterscheiden, die von TO und diejenigen, die aus IR-LEDs von HMD kommen.
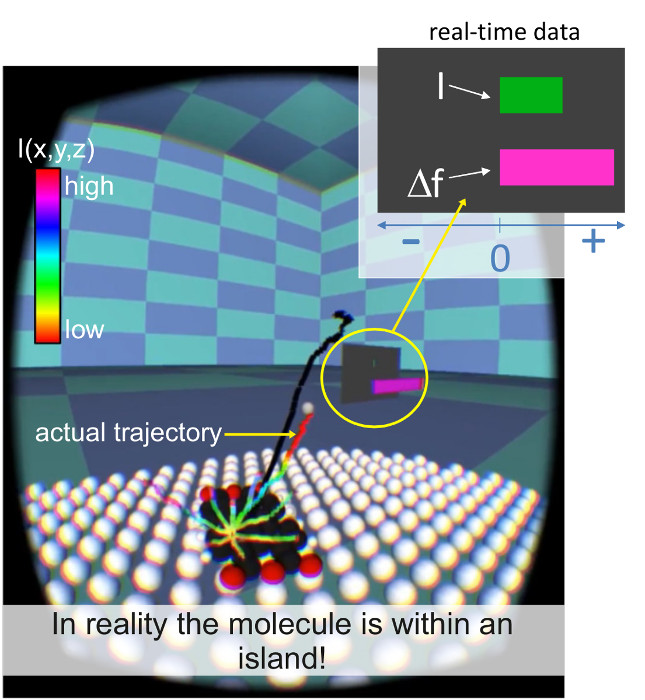
Abbildung 5. S creenshot der virtuellen 3D – Szene dargestellt an den Bediener in HMD während HCM. Eine Reihe von weißen Kugeln bildet ein Modell Ag (111) -Oberfläche. Ausrichtung der Modellfläche mit der Orientierung der Probe nicht notwendigerweise zusammenfallen kann. Ein Modell des PTCDA Molekül ist oberhalb der Modelloberfläche platziert. C, O, H-Atome von PTCDA sind in schwarz, rot und weiß gezeigt. Zum Zwecke der Bequemlichkeit azimutale Ausrichtung des Modellmoleküls kann eingestellt werden, um die Ausrichtung des realen Moleküls zu passen gewähltfür Manipulation. Die Spitzenposition wird durch eine einzelne weiße Kugel markiert die äußerste Spitze Spitze Atom darstellt. Die Echtzeit-I (x, y, z) und & Dgr; f (x, y, z) -Daten werden als Balkenanzeigen platziert neben der Spitze angezeigt. Zuvor als gut aufgenommen, da die aktuell ausgeführten Manipulationen als 3D Trajektorien angezeigt werden, deren Farbe repräsentiert entweder log (I (x, y, z)) oder & Delta; f (x, y, z) gemessenen Werte an den Positionen der Flugbahn entsprechen. Die Figur zeigt Trajektorien, die mit log (I (x, y, z)) Signal gefärbt sind. Der Farbkontrast zwischen log (I (x, y, z)) und Af (x, y, z) Modi durch Drücken einer Taste eingeschaltet werden. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
