התזת חול הוא צעד חשוב בתהליך הייצור בגלל משטח מתכת הגלם בולט משקף את אור אנדוסקופ, מה שהופך אותו בלתי אפשרי עבור כדי להתגלות החוגים. קשה להבחין החוגים אפילו בעין בלתי מזוינת (ראה איור 5). ראוי לציין, כי השטח של היעד הראו כבר נחרט עם לייזר. עם זאת, הדבר אינו מפחית השתקפות אור.
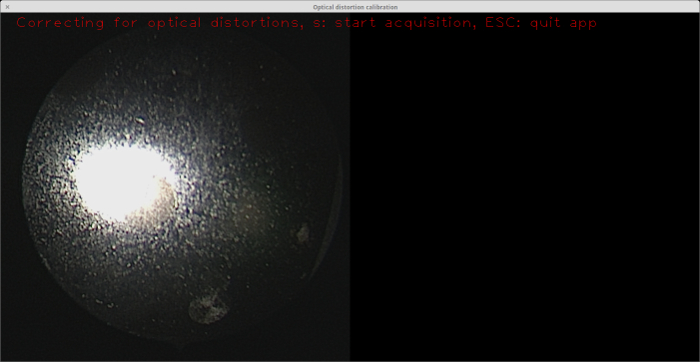
איור 5: כיול יעד ללא התזת חול מיושם. כפי שניתן לראות מן הנוף אנדוסקופ משמאל, בוהק מן האור אנדוסקופ על פני החומר מקשה אפילו בעין בלתי מזוינת להבחין החוגים (קיים מעגל פשוט לכוון דרום מזרח של השתקפות גדול). ראוי לציין, כי השטח של יעד זה (כלומר, "הרקע") נחקק כבר, אבל זה לא מועיל בהעדר התזת חול. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
לפני תחריט דפוס, חשוב גם כדי לחרוט את פני השטח של המדגם כולו. דבר זה הכרחי מכיוון שטח התזת החול יש החזר ראי רב (ראה איור 6), אשר מפריע זיהוי בועה.
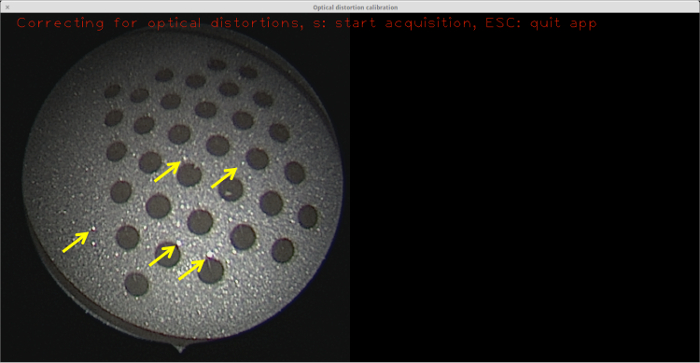
איור 6: Sandblasted לקרקע ללא תחריט. אמנם לא בולט כמו משטח מתכת הגלם, החזר הראי הקטן יחסית (שחלקם מודגשים עם חצים צהובים) הם עדיין מספיק כדי למנוע זיהוי בועה להצליח, ולכן אין כיול ניתן לבצע עם יעד זה.arget = "_ blank"> לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
החלת לייזר במהירויות שונות נותן צבעי רקע שונים. צבע הרקע ממלא תפקיד משמעותי את הניגוד בין העיגולים ברקע. לפיכך, הוא חיוני, כדי לקבוע את צבע רקע האופטימלי. לשם כך, צלחת עם עיגולים חרוטים נגד קבוצה של מרקעים שונים נוצרו (ראה איור 7). הרקע נבדקו באמצעות מודול זיהוי תכונה של OpenCV 23, אשר משמש מודול כיול המצלמה OpenCV 17. בעבודה זו, עשויה המטרה של פלדת אל-חלד, כפי שהוא הוא החומר הנפוץ ביותר והאמין ביותר בשימוש במרפאות עבור מכשירים רפואיים. חומר זה הוא זמין בחינם, לא יקר, חזק, קל לעקר. חומרים אחרים יכולים לשמש באופן פוטנציאלי עבור יעד הכיול, כגון מתכות אלומיניום או המכיל יוד, אך זהו scopדואר של עבודה בעתיד.
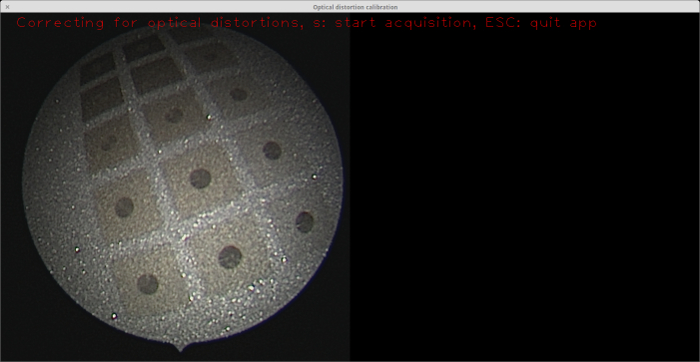
איור 7: צלחת נירוסטה שמציעה פלטה של צבעי רקע שונים חרוטים עם הליזר. ניסויים מעשיים נערכו בשיתוף עם מודול זיהוי תכונת OpenCV כדי לקבוע איזה צבע רקע נותן את התוצאה האופטימלית מבחינת בועה-אל-רקע ניגוד 23. ההשקפה אנדוסקופ משמאל מראה את הצלחת. צבעים ברקע המתונים (כלומר, אלה אחרים אלה האפלים קלים) ב לוח זה להניב זיהוי בועה טוב יותר. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
אחד היתרונות של עבודה זו היא כי ביצוע כיול באמצעות היעד המפוברק לוקח 2-3 דקות. רוב המאמץ ללכתes לייצוב אנדוסקופ ידני כדי להשיג צפיות הגונות של דפוס הכיול. באמצעות בעל אנדוסקופ שהותקן יכול לבטל את הצורך ייצוב ידני, אשר בתורו יכול לקצר את זמן הכיול באופן משמעותי.

וידאו 1: וידאו המציג כיצד כיול עיוות אופטית יכול להתבצע באמצעות יעד הכיול שפותח יחד עם תוכנת endocal. אנא לחץ כאן כדי לצפות בסרטון זה. (לחץ לחיצה ימנית כדי להוריד.)
היתרון של העבודה שלנו בהשוואה לעבודה ואח ונגרט. 15 הוא שמודול כיול המצלמה OpenCV 17 יכול לשמש הוא לכיול, ללא צורך parame שינוי או מותאם אישיתterization. בגלל OpenCV היא מבוססת היטב ומתוחזקים היטב חבילת תוכנה, והוא פופולרי מאוד בקרב קהילת הראייה הממוחשבת, באמצעות שהיא מבטלת את הצורך לכתיבה ושמירת תוכנה מותאמת אישית. לנוחיות הקוראת, יישום GUI קומפקטי מסופק 16, אשר קורא יכול בקלות להתקין ולהשתמש לבחון מטרות כיול חדשות. אחד החסרונות של השיטה שלנו לעומת ונגרט et al. 15 הם כי השיטה שלהם היא איתנה יותר כדי חסימות של התבנית, כפי שהיא אינה דורשת זיהוי של כל הכתמים.
בתחילה, מטרת כיול עם דפוס שחמט הייתה מפוברקת עבור עבודה זו. עם זאת, סוג זה של יעד כיול התברר מתאים בניסויים בשל הקושי לחשוף את הפינות של ריבועי השחמט. זיהוי פינה מסתמך על binarization מבוסס תמונה היסטוגרמה (לראות את קוד מקור OpenCV 24). איזה שדטמון בצורך ניגוד צבע ברור בין הריבועים הכהים ובהירים, אשר לא יכול להיות מובטח עם דפוס השחמט שלנו, באופן חלקי בשל החזר ראי, כמו אלה שמוצגים באיור 6. החזר ראי כאלה נמצאים גם לאחר תחריט רקע; עם זאת, זיהוי של החוגים נראה פחות רגיש זה חיסרון.
בשנת ההגדרה הנוכחית, רק תצוגות בניצב של יעד הכיול ולאפשר זיהוי בועה מוצלח. זהו בשל החזר הראי מפני שטח היעד פוגע זיהוי בועה בזוויות אלכסוניות. אנחנו עובדים כדי לשפר עוד יותר את היעד כדי לאפשר לרכישת צפיות מגוונת רחבה יותר של זוויות, אשר עלול לשפר את איכות כיולים שבוצעו 20.
ב בזמן אמת השליה mosaicing צינור שהוצע בעבר 11, החישוב של טראנסהיווצרות ממפת זוגות תמונה נשענת על איתור הקיבוץ המוצלח של תכונות. עיוותים אופטיות, ומצד שני, לגרום לקבוצה של תכונות עם גיאומטריה נוקשה להופיע שונה ברחבי תמונות. כתוצאה מכך, הבדל זה מוביל הדיוקים טרנספורמציות הממוחשבים, אשר גורמים מרחפות בפסיפסי התמונה המתקבלים. בגלל העיוותים האופטיות הבולטות נמצאות לקראת השולים, תמונות אנדוסקופית נחתכות כעת לאזורים הפנימיים שלהם. אז יש לי תיקון טוב עיוותים אופטיות פוטנציאל יאפשר שילוב של חלק גדול יותר של כל תמונה לתוך תהליך mosaicing. היתרון של שיטה זו הוא כפול. ראשית, זה יגדיל את מספר התכונות זוהו כל תמונה, פוטנציאל שיפור החישוב של טרנספורמציות תמונה. שנית, היא תאפשר פני היעד אנטומיים כולו להיות משוחזרת בתוך זמן קצר יותר.
