生の金属面が目立つことは不可能円が検出されるようにすること、内視鏡の光を反射するので、サンドブラストは、製造プロセスにおける重要なステップです。それも肉眼で円を区別することは困難である( 図5参照)。示さターゲットの表面がすでにレーザーでエッチングしたことに注意してください。しかしながら、これは、光の反射を減少させません。
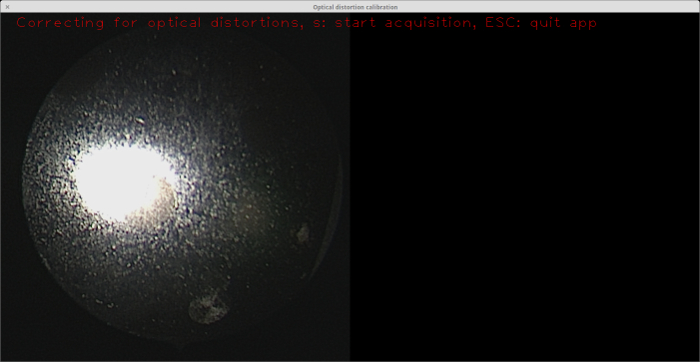
図5:なしサンドブラストでのキャリブレーションターゲットが適用されます。左側の内視鏡ビューから見られるように、材料表面上の内視鏡の光からのグレアが(ちょうど大きな反射の南東に円がある)でも、円を区別する肉眼のためにそれを困難にしています。このターゲット( すなわち、「バックグラウンド」)の表面は既にエッチングが、これではありませんされたことに注意してくださいサンドブラストの不在に役立ちます。 この図の拡大版をご覧になるにはこちらをクリックしてください。
パターンエッチングの前に、試料全体の表面をエッチングすることも重要です。これは、サンドブラスト処理表面は、多くの鏡面反射を持っているので、ブロブ検出を妨害、( 図6を参照)が必要です。
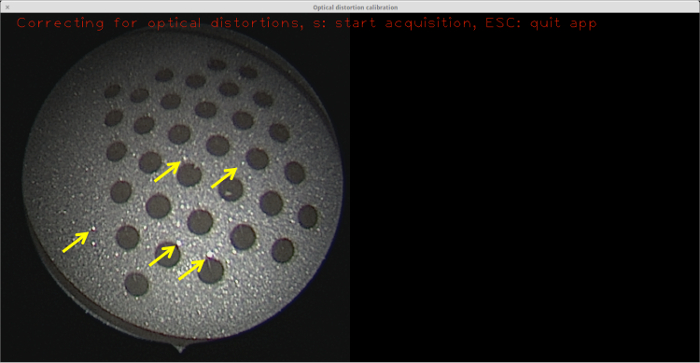
図6:なしエッチングで表面をサンドブラスト。生の金属表面ほど顕著ではないが、(黄色の矢印で強調されているそのうちのいくつか)が比較的小さい鏡面反射がまだ続くからブロブ検出を防止するのに十分であるので、何のキャリブレーションは、このターゲットを用いて実行することはできません。ARGET = "_空白">この図の拡大版をご覧になるにはこちらをクリックしてください。
異なる速度でレーザーを適用すると、別の背景色を与えます。背景色は、円と背景とのコントラストが重要な役割を果たしています。したがって、最適な背景色を決定するために重要です。この目的のために、丸付きプレートが作成された別の背景( 図7参照 )のセットに対してエッチング。背景はOpenCVのカメラキャリブレーションモジュール17で使用されているOpenCVの23の特徴検出モジュールを用いて試験しました。それは、医療デバイスのための診療所で使用される最も一般的かつ信頼性の高い物質であるように、この作業では、ターゲットは、ステンレス鋼で作られました。この材料は、高価な堅牢、かつ殺菌することは容易ではない、自由に利用可能です。他の材料は、潜在的に、アルミニウム又はヨウ素添加金属として、較正ターゲットを使用することができるが、これはSCOPあります今後の作業の電子。
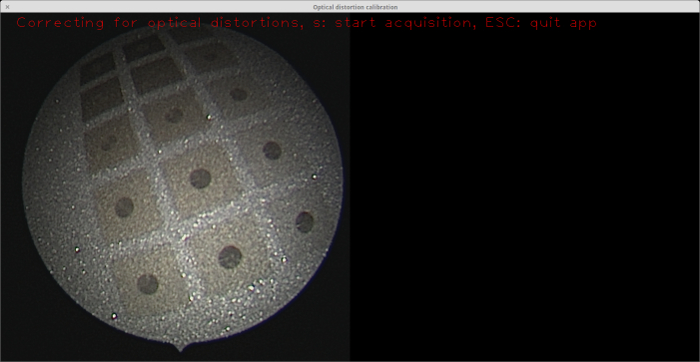
図7:レーザーでエッチング異なる背景色のパレットを搭載ステンレス鋼板。実用的な実験は、色ブロブ対背景コントラスト23の観点で最適な結果を与えるバックグラウンドを決定するためにOpenCVの特徴検出モジュールと組み合わせて実施されました。左側の内視鏡ビューは、プレートを示しています。適度な背景色( すなわち、最も暗いと最も軽いものことを他のもの)は、このパレットでは、より良いブロブ検出をもたらします。 この図の拡大版をご覧になるにはこちらをクリックしてください。
この作業の利点の1つは、作製対象を使用してキャリブレーションを行うこと2-3分かかることです。努力のほとんどが行きますESは手動でキャリブレーションパターンのまともなビューを取得するために内視鏡を安定化します。特注の内視鏡保持具を使用して順番に大幅較正時間を短縮する可能性があり、手動安定化の必要性を排除することができます。

ビデオ1:ビデオは、光学歪み校正がendocalソフトウェアと共に開発較正ターゲットを用いて行うことができる方法を示します。 このビデオを見るにはこちらをクリックしてください。 (ダウンロードするには、右クリックします。)
Wengert らの仕事に比べて我々の仕事の利点。 図15は、OpenCVのカメラキャリブレーションモジュール17は、任意の変更またはカスタムパラメを必要とせずに、キャリブレーションのためのものであるとして使用され得ることですterization。 OpenCVのは、十分に確立されたと手入れの行き届いたソフトウェアパッケージであり、それは書き込み、カスタムソフトウェアを維持する必要がなくなり使用して、コンピュータビジョンのコミュニティで非常に人気がありますので。読者の便宜のために、コンパクトなGUIアプリケーションは、読者が簡単にインストールして、新しいキャリブレーションターゲットをテストするために使用できる16を 、提供されています。 Wengert らに比べて我々の方法の一つの欠点。 15は 、すべてのブロブの検出を必要としないように、その方法は、パターンの閉塞に対してよりロバストであるということです。
最初は、チェッカーボードパターンとキャリブレーションターゲットがこの仕事のために作製しました。ただし、キャリブレーションターゲットのこのタイプは、市松模様の正方形の隅を検出することの難しさに起因する実験に不適切であることが判明しました。コーナー検出は、ヒストグラムベースの画像2値化(OpenCVのソースコード24を参照)に依存します。このインプ図6に示すものと同様に、部分的に起因する鏡面反射に、私たちの市松模様で保証されませんでした明るさと暗さの正方形、間に明確な色のコントラストの必要性があります。このような鏡面反射はあっても、バックグラウンドのエッチング後に存在しています。しかしながら、円の検出は、この欠点に敏感であると思われます。
現在の設定では、キャリブレーションターゲットの唯一の垂直ビューは成功したブロブの検出を可能にします。これは、斜めの角度でブロブ検出を妨げるターゲット表面からの鏡面反射によるものです。我々は、潜在的に行わ校正20の品質を向上させることができ角の広い範囲でのビューの取得を可能にするために、標的の向上に努めています。
リアルタイムで胎盤は、以前に11を提案したパイプライン、トランスの計算をモザイク画像対をマッピング形成が検出成功と機能のグループ化に依存しています。光学的歪みは、他の一方で、剛性のジオメトリを持つフィーチャのグループが画像間で異なる出現させます。その結果、この差は得られる画像のモザイクのドリフトを引き起こす計算変換の不正確さにつながります。最も顕著な光学歪みがエッジに向かって存在しているので、内視鏡画像は、現在彼らの最も内側の領域に切り取られます。光学的歪みのための良好な補正は、潜在的にモザイク処理に各画像の大部分の組み込みを可能にするであろう。この方法の利点は、2つある。まず、潜在的に、画像変換の計算を改善する、各画像内の検出された特徴の数を増加させます。第二に、それは短時間で再構成する全体目標の解剖学的表面を可能にするであろう。
