De flesta leddjur flytta antenner eller andra bihang till prov miljömässiga cues och signaler i tid och rum. Djuren kan använda antenner för att navigera sin omgivning genom att upptäcka sensoriska signaler som flyktiga kemiska ämnen och luktintrycket och mekaniska stimuli1,2,3,4. Hos insekter innehåller antenner sensoriska receptorer som binder till flyktiga kemiska ämnen4,5,6 och sända denna signal via luktsinnet sensoriska nervceller till centrala hjärnan regionerna1,7 ,8,9. Insekter kan justera antennerna positioner för att modulera information om inkommande lukter4,10,11. Denna modulering underlättar aktivt informerade beteendemässiga Svaren till lukt och sina plymer12,13.
Många insekter, däribland Hymenopterans (t.ex. honungsbin och humlor), Lepidopterans (t.ex. fjärilar) och Dipterans (t.ex. flugor och myggor), bland annat foder genom att utvidga sin snabel14 , 15 , 16 , 17 , 18 , 19 , 20 , 21. snabel förlängning har använts på ett tillförlitligt sätt i förflutnan för en mängd inlärning och minne uppgifter22,23,24,25,26, 27,28,29,30,31. Kvantitativ bedömning av antenner rörelse med hög temporal och spatial upplösning kanske likaså ger insikt i förhållandet mellan stimulansen, beteende och inre tillstånd av djuret. Faktiskt tidigare arbete har visat hur de antennal rörelserna innehåller en rik mängd information om honey bee spårning av miljön och hur rörelser förändras med lärande32,33,34, 35,36,37,38.
Under det senaste decenniet, har metoder för att observera djurs beteende kraftigt påskyndats av framsteg inom högupplösta videokameror, dator bearbetning hastigheter och maskin vision algoritmer. Uppgifter som djur upptäckt, inventering, spårning och plats förkärlek analyserna har fått hjälp med sofistikerad mjukvara som kan bearbeta videor av djurs beteende och extrahera relevanta åtgärder39,40, 41,42,43,44,45,46,47.
Dessa tekniker har också hjälpt spårning av insekt antenn och Snabel rörelser. Det är möjligt för mänskliga bedömare att använda en musmarkören att manuellt spåra placeringen av antennerna. Men denna metod kan vara korrekt, uppgiften är tidskrävande och mänskliga ouppmärksamhet och trötthet kan resultera i otillförlitliga resultat. Specialutrustning och förberedelse kan användas för att minska behovet av komplex programvara. Till exempel en inställning används en höghastighetskamera och målade tips av antenner att spåra de antenn rörelse48. Användare kan också bli ombedd att välja nyckel-ramar av videor att hjälpa programvaran att upptäcka antenn och Snabel plats49. Ett annat tillvägagångssätt upptäcktes de två största rörelse kluster för att identifiera antenner, men det identifierar inte de snabel läge50. Ett annat programpaket kan upptäcka antenn och Snabel platser, men kräver ca 7,5 s bearbetningstid per ram51, som kunde vara oöverkomliga för realtid eller långsiktig observationsstudier. Slutligen, det kan vara möjligt att anpassa kommersiell programvarupaket (t.ex. EthoVision) för att utföra den uppgift46, men deras licensiering och utbildning kostnader kan vara oöverkomliga.
Med den metod som beskrivs här, utökade vi vårt tidigare arbete på rörelse analys programvara41 att spåra placeringen av insekt antenner och Snabel med följande mål: (1) inget krav på speciell hårdvara eller komplexa djur beredning, (2). ram bearbetning i realtid (30 bps eller snabbare) på en konventionell dator, (3) enkel användning och (4) öppen källkod, lätt utdragbara kod.
Den resulterande roman metod och programvara med öppen källkod, SwarmSight bihang spårning, kräver inte målning av antenner tips, kan använda en konsument webbkamera för att fånga videoklipp och videobildrutor processer på 30-60 fps på en konventionell dator ( (Se figur 1). Programvaran använder video filer som indata. Användaren söker efter placeringen av insekt huvudet i videon och efter bearbetning, en fil med kommaavgränsade värden (.csv) produceras med platserna av antenner och snabel. Programvaran är kan läsa hundratals olika videoformat (inklusive format som produceras av de flesta digitalkameror) med hjälp av FFmpeg bibliotek52.
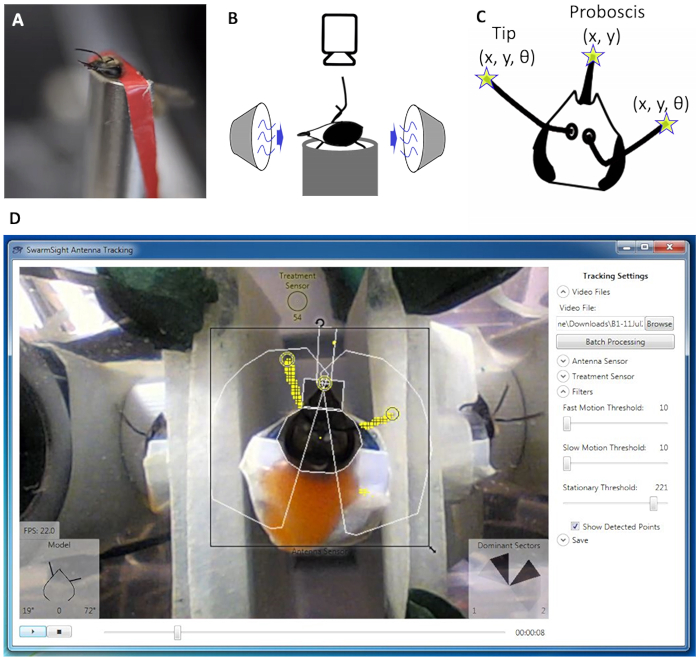
Figur 1: djur installation och programvara utdata. (A) A honey bee forager med dess huvud och kropp fastspänd i en sele. (B) lukt källa placeras framför djuret, en videokamera är placerad ovanför, och en vakuumkällan är placerad bakom djuret. (C), antennen spets och Snabel variabler identifieras av programvaran SwarmSight från videon. (D), användaren placerar antennen sensorn över djuret och justerar filterparametrarna. Programmet upptäcker antenn och Snabel positioner (gula ringar).Klicka här för att visa en större version av denna siffra.
Först är en insektens kropp och huvudet fastspända i en sele så att antennen och Snabel rörelser följs enkelt (figur 1A). En lukt källa placeras framför insekten, med en vakuum källa som placeras bakom, ta bort lukter från luften och minimera potentiella effekter av sensorisk anpassning (figur 1B). En konventionell webbkamera är placerad ovanför den insektsvaxer huvud på ett stativ. En LED kan placeras inom kamerans vy att indikera när lukten som presenteras.
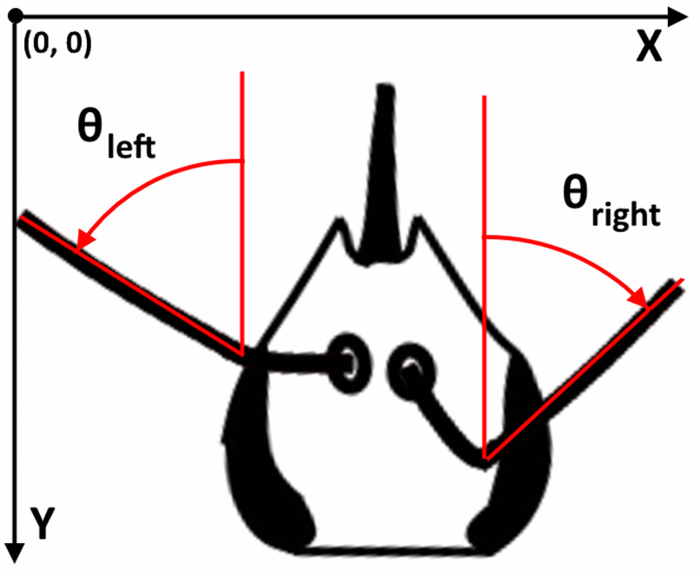
Figur 2: antenn koordinatsystem. X, Y-värden använder video koordinatsystemet, där övre vänstra hörnet är ursprung och X- och Y-värden ökar när du flyttar mot det nedre högra hörnet. Vinklar är uttryckt i grader med avseende på framsidan av huvudet (vanligtvis lukt källan). Värdet ”0” betyder att den linje som bildas av den antenn flagellen pekar direkt framför djuret. Alla vinklar är positiva, utom när en antenn pekar i motsatt riktning (t.ex. rätt flagellen punkterna till vänster). Klicka här för att se en större version av denna siffra.
Efter inspelningen, öppnas video filen med programvaran SwarmSight, där användaren placerar widgeten antenn Sensor (figur 1 d, svart fyrkant) över huvudet av insekt och börjar videouppspelningen. När resultaten sparas, CSV-filen innehåller X, Y positioner av antennen tips, antenn vinklar i förhållande till framsidan av huvudet (figur 2), och Snabel X, Y-position. Dessutom beräknas en dominerande sektorn mått för varje antenn. Den metriska visar vilken av de fem 36 graders sektorer som omger varje antenn innehöll flest poäng anses sannolikt att vara antenner och kan vara användbart om antenn/vinkel mätvärden inte är tillförlitliga på grund av bullriga eller annars problematiska videor.
Kort, programvaran fungerar med hjälp av en uppsättning rörelse filter53 och en avslappnad översvämning fyllning algoritm54. För att hitta sannolika antenn punkter, två filter används: en 3-i rad-bildruta skillnaden filter41,55 och en median-bakgrund subtraktion56 filter. Ett färgfilter avstånd tröskel används för Snabel punkt upptäckt. Topp 10% av pekar av varje filter kombineras, och en översvämning fyllning algoritm som inspekterar sammanhängande punkter med luckor upp till 2 pixlar (px) lokaliserar extrema punkter. Parallella ram avkodning, bearbetning, och rendering pipelines och optimerad minne tilldelningen av filtret dataflödet uppnår hög prestanda. Råa x- och y-koordinaten värden produceras av programvaran är efterbehandlade med en 3-frame rullande median filter57 (se diskussion). Instruktionerna för att ladda ner full källkod kan hittas online58.
Nedan är ett protokoll för att förbereda en honey bee forager för antenn spårning. En liknande protokoll kan användas för att spåra antenn/snabel förehavanden av någon annan insekt. I resultatavsnittet beskriver vi ett prov antennen spårningsutdata som detekteras av programvaran, jämförelse av programvara utdata till spårning framförd av mänskliga bedömare, och bedömning av antenner rörlighet svar på fem doftämnen.
