Selon les données révélées par les Estimations mondiales de la santé en 2016, les accidents de la circulation sont la huitième cause de décès dans le monde, avec 1,4 million de décès dansle monde 1. En 2018, 39,2 % des accidents de la circulation étaient des collisions avec des véhicules automobiles dans les transports, dont 7,2 % étaient des collisions à l’arrière. Une solution pour accroître la sécurité des véhicules et des routes est le développement d’un système avancé d’assistance à la conduite (ADAS) pour avertir les conducteurs des dangers potentiels. Les données ont montré qu’ADAS peut réduire considérablement le taux de collisions arrière, et il est encore plus efficace lorsqu’il est équipé d’un système de freinage automatique2. En outre, avec le développement de véhicules autonomes, moins d’implication humaine sera nécessaire pour contrôler le véhicule, ce qui rend un système d’avertissement de demande de reprise (TOR) une nécessité lorsque le véhicule autonome ne parvient pas à se réguler. La conception du système d’avertissement ADAS et TOR est maintenant un élément important de la technologie pour les conducteurs afin d’éviter les accidents imminents en quelques secondes. L’expérience exemplaire a utilisé une boîte à outils vibrante ainsi qu’une plate-forme de simulation de conduite pour étudier quel emplacement générerait le meilleur résultat lorsqu’un système d’avertissement vibrotactile a été utilisé comme système d’avertissement ADAS et TOR potentiel.
Classés par canaux perceptuels, il existe généralement trois types de modalités d’avertissement, visuelles, auditives et tactiles. Chaque modalité d’avertissement a ses propres mérites et limites. Lorsque des systèmes d’avertissement visuel sont utilisés, les conducteurs peuvent souffrir d’une surchargevisuelle 3,ce qui nuit aux performances de conduite dues à la cécité inattentionnelle4,5. Bien qu’un système d’avertissement auditif n’influence pas le champ visuel des conducteurs, son efficacité dépend grandement de l’environnement comme la musique de fond et d’autres bruits dansl’environnement de conduite 6,7. Ainsi, les situations qui contiennent d’autres informations auditives externes ou un bruit important peuvent conduire à la surdité inattentionnelle8,9, réduisant l’efficacité d’un système d’avertissement auditif. En comparaison, les systèmes d’avertissement tactiles ne sont pas en concurrence avec le traitement visuel ou auditif des conducteurs. En envoyant des avertissements vibrotactiles aux conducteurs, les systèmes d’avertissement tactiles surmontent les limites des systèmes d’avertissement visuels et auditifs.
Des études antérieures ont montré que les avertissements tactiles peuvent profiter aux conducteurs en raccourcissant leur temps de réponse aux freins. Il a également été constaté que les systèmes d’avertissement tactiles donnent un résultat plus efficacesur les systèmes visuels 10,11 etauditifs 12,13,14 dans certaines situations. Toutefois, des recherches limitées ont porté sur l’étude de l’emplacement optimal pour placer un dispositif d’avertissement tactile. Selon l’hypothèse sensorielle de cortex15 et l’hypothèse de distance sensorielle16,l’étude exemplaire a choisi les secteurs de doigt, de poignet, et de temple comme emplacements expérimentaux pour placer un dispositif tactile d’avertissement. Avec le protocole introduit, la fréquence et le temps de livraison d’un avertissement vibrant, et les intervalles entre les vibrations de la boîte à outils vibrante, peuvent être configurés pour répondre aux exigences expérimentales. Cette boîte à outils vibrante se composait d’une puce maîtresse, d’une puce régulateur de tension, d’un multiplexeur, d’un adaptateur USB à Transistor-Transistor-Logic (TTL), d’un transistor métal-oxyde-semi-conducteur à effet de champ (MOSFET) et d’un module Bluetooth. Le nombre de modules vibrants peut également varier en fonction des besoins des chercheurs, avec jusqu’à quatre modules vibrant en même temps. Lors de la mise en œuvre de la boîte à outils vibrante dans les expériences liées à la conduite, il peut être configuré pour s’adapter aux paramètres expérimentaux ainsi que synchronisé avec les données de performance de conduite en révisant les codes de la simulation de conduite.
Alors que pour les chercheurs, mener une expérience de conduite sur une plate-forme virtuelle est plus faisable que dans le monde réel en raison du risque et des coûts impliqués. Par exemple, la collecte d’indicateurs de rendement peut être difficile, et il est difficile de contrôler les facteurs environnementaux impliqués lorsque des expériences sont menées dans le monde réel. Par conséquent, de nombreuses études ont utilisé des simulateurs de conduite à base fixe fonctionnant sur PC au cours des dernières années comme solution de rechange pour mener des études sur la conduite sur route. Après avoir appris, développé et fait des recherches pendant plus de 11 ans dans le milieu de la recherche sur la conduite automobile, nous avons établi une plate-forme de simulation de conduite avec une vraie voiture qui se compose d’un logiciel de simulation de conduite open-source et d’un kit matériel, y compris un volant et une boîte de vitesses, trois pédales, trois projecteurs montés et trois écrans de projecteur. Avec le logiciel de simulation de conduite prend en charge un seul écran, le protocole présenté utilisé uniquement le projecteur central et l’écran du projecteur pour mener l’expérience.
Il y a deux avantages majeurs à utiliser la plate-forme de simulation de conduite présentée. Un avantage de cette plate-forme est qu’elle utilise un logiciel open-source. En utilisant la plate-forme open source conviviale, les chercheurs peuvent personnaliser la simulation et la boîte à outils vibrante pour leurs besoins de recherche uniques en effectuant une configuration logicielle simple sans aucun développement de code. En révisant les codes, les chercheurs peuvent créer des simulations de conduite qui offrent une fidélité relative à la réalité avec beaucoup d’options disponibles sur les types de voitures, les types de routes, la résistance du volant, la turbulence latérale et longitudinale du vent, les interfaces du programme d’application des événements de temps et de frein (API) pour la synchronisation externe des logiciels, et la mise en œuvre des paradigmes comportementaux tels que la tâche de suivi des voitures et la tâche N-Back. Bien que la conduite de recherches liées à la conduite dans un simulateur de conduite ne puisse pas reproduire pleinement la conduite dans le monde réel, les données recueillies au moyen d’un simulateur de conduite sont raisonnables et ont été largementadoptées par les chercheurs 17,18.
Un autre avantage du simulateur de conduite proposé est son faible coût. Comme mentionné précédemment, le logiciel de simulation de conduite introduit est un logiciel open-source qui est disponible gratuitement pour les utilisateurs. En outre, le coût total de l’ensemble de la configuration matérielle dans ce protocole est inférieur par rapport aux simulateurs de conduite commerciale haute fidélité typiques. La figure 1 a et b montre la configuration complète de deux simulateurs de conduite dont le coût est compris entre 3 000 $ et 3 000 $. En revanche, les simulateurs de conduite commerciale haute fidélité typiques (à base fixe) coûtent habituellement entre 10 000 $ et 100 000 $. Avec son prix très abordable, ce simulateur de conduite peut être un choix populaire non seulement à des fins de recherche académique, mais aussi pour la conduite des classesde conduite 19 et pour la démonstration des technologies liées à laconduite 20,21.
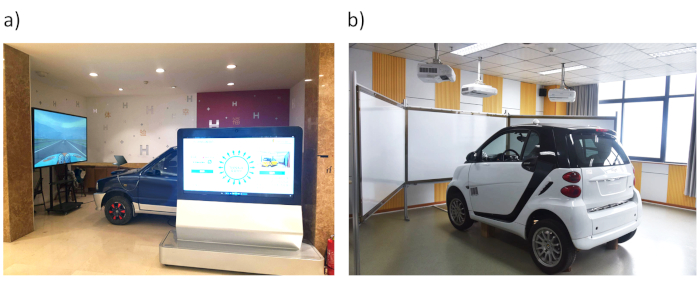
Figure 1 : Une image des simulateurs de conduite. Les deux simulateurs de conduite se composaient d’un volant et d’une boîte de vitesses, de trois pédales et d’un véhicule. a) Une configuration de simulateur de conduite de 3 000 $ qui utilisait un écran LCD de 80 pouces avec une résolution de 3840 × 2160. b Une configuration de simulateur de conduite de 30 000 $ qui utilisait trois projecteurs montés et trois écrans de projecteur d’une dimension de 223 x 126 cm chacun. Les écrans de projection ont été placés à 60 cm au-dessus du sol et à 22 cm de l’avant du véhicule. Seuls le projecteur central et l’écran du projecteur ont été utilisés pour l’expérience en cours. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
Le logiciel de simulation de conduite et la boîte à outils vibrante de la méthode proposée ont déjà été utilisés dans des étudesantérieures par nos chercheurs 22,23,24,25,26,27,28,29. Cette boîte à outils vibrante auto-développée suivant la norme ISO30 peut être appliquée dans différentsdomaines 31,32 en ajustant la fréquence et l’intensité des vibrations. Il est important de noter qu’une nouvelle version de la boîte à outils vibrante a été développée et introduite dans le protocole suivant. Au lieu d’ajuster la fréquence des vibrations à l’aide d’un adaptateur de tension réglable, la nouvelle version est équipée de cinq fréquences vibratoires différentes et peut être ajustée plus facilement à l’aide des codes fournis dans le fichier de codage supplémentaire 1. De plus, le simulateur de conduite présenté offre aux chercheurs un moyen sûr, peu coûteux et efficace d’étudier divers types de recherche sur la conduite automobile. Ainsi, ce protocole convient aux laboratoires de recherche qui ont un budget limité et qui ont un fort besoin de personnaliser les environnements de conduite expérimentaux.
