Nach den Daten, die von den Global Health Estimates im Jahr 2016 enthüllt wurden, ist Verkehrsschäden die achte Ursache für weltweite Todesfälle, die zu 1,4 Millionen Todesfällen weltweit1führen. Im Jahr 2018 waren 39,2 % der Verkehrsunfälle Kollisionen mit Kraftfahrzeugen im Verkehr, 7,2 % davon Auffahrunfälle. Eine Lösung zur Erhöhung der Fahrzeug- und Straßenverkehrssicherheit ist die Entwicklung eines fortschrittlichen Fahrassistenzsystems (ADAS), um Fahrer vor potenziellen Gefahren zu warnen. Die Daten haben gezeigt, dass ADAS die Rate von Auffahrunfällen erheblich reduzieren kann, und es ist noch effektiver, wenn es mit einem Auto-Bremssystem ausgestattet ist2. Darüber hinaus wird bei der Entwicklung autonomer Fahrzeuge weniger menschliche samtische Sendekraft erforderlich sein, um das Fahrzeug zu steuern, was ein Warnsystem für die Übernahme (TOR) zu einer Notwendigkeit macht, wenn das autonome Fahrzeug sich nicht selbst reguliert. Das Design des ADAS- und TOR-Warnsystems ist nun eine wichtige Technologie für Autofahrer, um drohende Unfälle innerhalb weniger Sekunden zu vermeiden. Das exemplarische Experiment verwendete ein vibrierendes Toolkit zusammen mit einer Fahrsimulationsplattform, um zu untersuchen, welcher Standort das beste Ergebnis erzielen würde, wenn ein vibrotactile Warnsystem als potenzielles ADAS- und TOR-Warnsystem verwendet wurde.
Kategorisiert durch Wahrnehmungskanäle, gibt es in der Regel drei Arten von Warnmodalitäten, d. h. visuelle, auditive und taktile. Jede Warnmodalität hat ihre eigenen Vorzüge und Grenzen. Wenn visuelle Warnsysteme im Einsatz sind, können Fahrer unter visueller Überlastung leiden3, Beeinträchtigung der Fahrleistungen aufgrund von unaufmerksamer Blindheit4,5. Obwohl ein auditives Warnsystem das Sichtfeld der Fahrer nicht beeinflusst, hängt seine Wirksamkeit stark von der Umgebung ab, wie Hintergrundmusik und andere Geräusche in der Fahrumgebung6,7. Daher können Situationen, die andere externe Auditinformationen oder erhebliche Geräusche enthalten, zu unaufmerksamer Taubheit8,9führen, wodurch die Wirksamkeit eines auditiven Warnsystems verringert wird. Im Vergleich dazu stehen taktile Warnsysteme nicht im Wettbewerb mit der visuellen oder auditiven Verarbeitung der Fahrer. Durch das Senden von vibrotactile Warnungen an Fahrer überwinden taktile Warnsysteme die Grenzen von visuellen und auditiven Warnsystemen.
Frühere Studien zeigten, dass taktile Warnhinweise den Fahrern zugute kommen können, indem sie ihre Bremsreaktionszeit verkürzen. Es wurde auch festgestellt, dass taktile Warnsysteme in bestimmten Situationen ein effektiveres Ergebnis gegenüber visuellen10,11 und auditiven12,13,14 Warnsystemen liefern. Die begrenzte Forschung konzentrierte sich jedoch auf die Untersuchung des optimalen Standorts für die Platzierung eines taktilen Warngeräts. Nach der sensorischen Kortexhypothese15 und der sensorischen Entfernungshypothese16wählte die Exemplarstudie die Finger-, Handgelenk- und Tempelbereiche als Versuchsorte für die Platzierung eines taktilen Warngeräts. Mit dem eingeführten Protokoll können die Häufigkeit und Lieferzeit einer vibrierenden Warnung sowie Intervalle zwischen Vibrationen des vibrierenden Toolkits so konfiguriert werden, dass sie den experimentellen Anforderungen entsprechen. Dieses vibrierende Toolkit bestand aus einem Master-Chip, einem Spannungsreglerchip, einem Multiplexer, einem USB-zu-Transistor-Logic (TTL)-Adapter, einem Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) und einem Bluetooth-Modul. Die Anzahl der vibrierenden Module kann auch je nach den Bedürfnissen der Forscher variieren, wobei bis zu vier Module gleichzeitig vibrieren. Bei der Implementierung des vibrierenden Toolkits in den fahrbezogenen Experimenten kann es so konfiguriert werden, dass es an die experimentellen Einstellungen anpasst und durch Die Überarbeitung der Codes der Fahrsimulation mit Fahrleistungsdaten synchronisiert wird.
Während für Forscher, Durchführung eines Fahrexperiments auf einer virtuellen Plattform ist mehr möglich als in der realen Welt aufgrund der Risiken und Kosten beteiligt. Beispielsweise kann das Sammeln von Leistungsindikatoren schwierig sein, und es ist schwierig, die Umweltfaktoren zu kontrollieren, die bei Derversuchen in der realen Welt erforderlich sind. Infolgedessen haben viele Studien in den letzten Jahren Festnetz-Fahrsimulatoren auf PCs als Alternative zur Durchführung von Fahrstudien auf der Straße verwendet. Nachdem wir über 11 Jahre lang in der Fahrforschungsgemeinschaft gelernt, entwickelt und recherchiert haben, haben wir eine Fahrsimulationsplattform mit einem echten Auto aufgebaut, die aus einer Open-Source-Fahrsimulationssoftware und einem Hardware-Kit besteht, einschließlich Lenkrad und Getriebe, drei Pedalen, drei montierten Projektoren und drei Projektorbildschirmen. Da die Fahrsimulationssoftware nur einen einzigen Bildschirm unterstützt, verwendet das vorgestellte Protokoll nur den zentralen Projektor und Projektorbildschirm, um das Experiment durchzuführen.
Die Nutzung der vorgestellten Fahrsimulationsplattform bietet zwei große Vorteile. Ein Vorteil dieser Plattform ist, dass sie eine Open-Source-Software verwendet. Mithilfe der benutzerfreundlichen Open-Source-Plattform können Forscher das Simulations- und Vibrations-Toolkit für ihre individuellen Forschungsanforderungen anpassen, indem sie eine einfache Softwarekonfiguration ohne Codeentwicklung vornehmen. Durch die Überarbeitung der Codes können Forscher Fahrsimulationen erstellen, die eine relative Realitätstreue bieten, mit vielen Optionen für Fahrzeugtypen, Straßentypen, Widerstand des Lenkrads, seitliche und längsförmige Windturbulenzen, Zeit- und Bremsereignis-Anwendungsprogrammschnittstellen (APIs) für externe Softwaresynchronisierung und Implementierung der Verhaltensparadigmen wie Auto-Following-Task und N-Back-Task. Obwohl die Durchführung von fahrbezogenen Forschung in einem Fahrsimulator kann nicht vollständig replizieren Fahren in der realen Welt, Daten durch einen Fahrsimulator gesammelt ist vernünftig und wurde von den Forschernangenommen 17,18.
Ein weiterer Vorteil des vorgeschlagenen Fahrsimulators sind die niedrigen Kosten. Wie bereits erwähnt, ist die eingeführte Fahrsimulationssoftware eine Open-Source-Software, die den Nutzern kostenlos zur Verfügung steht. Darüber hinaus sind die Gesamtkosten für die gesamte Hardware-Einrichtung in diesem Protokoll niedriger im Vergleich zu typischen High-Fidelity-Werbesimulatoren. Abbildung 1 a und b zeigen die komplette Einrichtung von zwei Fahrsimulatoren mit Kosten zwischen 3000 und 30000 US-Dollar. Im Gegensatz dazu kosten typische kommerzielle High-Fidelity-Fahrsimulatoren (fixed-base) in der Regel etwa 10.000 bis 100.000 US-Dollar. Mit seinem sehr erschwinglichen Preis kann dieser Fahrsimulator nicht nur für akademische Forschungszwecke, sondern auch für die Durchführung von Fahrklassen19 und für die Demonstration fahrbezogener Technologien eine beliebte Wahl sein20,21.
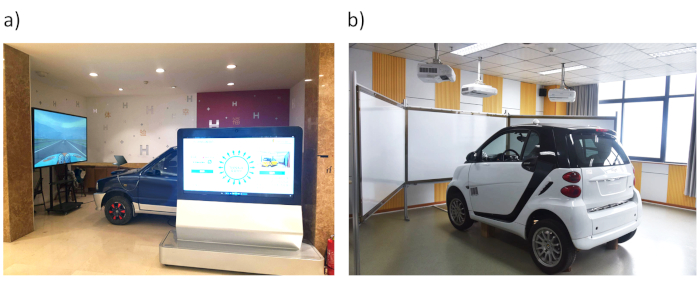
Abbildung 1: Ein Bild der Fahrsimulatoren. Beide Fahrsimulatoren bestanden aus einem Lenkrad und Getriebe, drei Pedalen und einem Fahrzeug. (a) Ein Fahrsimulator-Setup im Wert von 3000 US-Dollar, das einen 80-Zoll-LCD-Bildschirm mit einer Auflösung von 3840 × 2160 verwendet hat. b) ein Fahrsimulator-Setup im Wert von 30000 USD, bei dem drei montierte Projektoren und drei Projektorbildschirme mit einer Größe von jeweils 223 x 126 cm verwendet wurden. Die Projektionswände wurden 60 cm über dem Boden und 22 cm von der Fahrzeugfront entfernt platziert. Für das aktuelle Experiment wurden nur der zentrale Projektor und die Projektorleinwand verwendet. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Die Fahrsimulationssoftware und das vibrierende Toolkit in der vorgeschlagenen Methode wurden bereits in früheren Studien von unseren Forschern22,23,24,25,26,27,28,29verwendet. Dieses selbst entwickelte Vibrations-Toolkit nach ISO-Norm30 kann in verschiedenen Bereichen31,32 durch Einstellen der Schwingungsfrequenz und -intensität angewendet werden. Es ist wichtig zu beachten, dass eine neuere Version des vibrierenden Toolkits entwickelt wurde und im folgenden Protokoll eingeführt wird. Anstatt die Schwingungsfrequenz mit einem einstellbaren Spannungsadapter einzustellen, ist die neuere Version mit fünf verschiedenen Vibrationsfrequenzen ausgestattet und kann einfacher mit den Codes in Der Supplemental Coding File 1eingestellt werden. Darüber hinaus bietet der vorgestellte Fahrsimulator Forschern eine sichere, kostengünstige und effektive Möglichkeit, verschiedene Arten der fahrbezogenen Forschung zu untersuchen. Somit eignet sich dieses Protokoll für Forschungslaboratorien, die über ein begrenztes Budget verfügen und ein starkes Bedürfnis haben, experimentelle Fahrumgebungen anzupassen.
